空地一体化地形测量
2018-03-07李鹏,林杰,李欢
李 鹏,林 杰,李 欢
(1. 潮州市国土资源测绘队,广东 潮州 521000; 2. 广州天派仪器科技有限公司,广东 广州 510000)
近年来,随着无人机与数码相机技术的出现与发展,无人机航空摄影已成为快速获取地理信息的重要技术手段,在空间信息的获取与更新中起着不可替代的作用。基于无人机平台的数字航摄技术已显示出其独特的优势。三维激光扫描仪以线性扫描方式,高精度、高密度、高速度和免棱镜测量地表点并拍摄全景照片,能详细了解地面点的细节变化,且大大缩短外业工作时间。利用无人机获取的影像及高程加上地面扫描仪扫描出的高程及房屋属性结合的方式进行大比例地形图的测量,能够满足大比例尺测绘要求。
1 项目介绍及设备
本次项目位于潮州市区近郊,成果要求1∶1000地形图用于某度假村规划设计。总测量面积为11 km2,地形以山地为主,外加景区建筑及道路,人工施测难度较大,决定使用无人机加地面扫描仪的方式进行作业。
此次项目航飞使用了Trimble UX5 HP无人机系统,部分搭载相机为Sony a7R搭配35 mm镜头。地面扫描采用了Trimble SX10扫描全站仪。内业影像及扫描数据处理软件为Trimble Business Center,它是由天宝公司开发的一款集GPS、全站仪、水准仪、无人机影像及扫描数据于一体的处理软件,只需要简单操作,即可将数千张影像及扫描数据快速制成专业的、精确的正射影像及三维模型。
线化图制作软件为Virtual Surveyor软件加CASS软件,Virtual Surveyor 软件采用先进独特的模型信息立体呈现技术,将原始航空影像生成的数字正射影像和数字高程模型结合匹配生成百分百还原度的三维立体模型,在三维视角下查看和编辑真实地物。
2 外业数据采集及内业处理
2.1 外业数据采集
2.1.1 航飞任务规划
航飞任务规划在UX5 HP无人机自带的软件Aerial Imaging上进行。考虑到项目精度的要求为1∶1000地形图,项目组将测区划分为6块区域进行航摄。根据规范要求,最终确定的航摄方案为:像片航向重叠度为80%,旁向重叠度为75%,相对航高400 m,地面分辨率(GSD)5.3 cm。
2.1.2 控制点及检核点的布设与实测
测区大部分为山地,为了提高精度,笔者选择在航飞前人工布置了10个标靶作为地面像控点及检查点。具体实施步骤为:在航飞任务规划完成后,利用Google Earth在航飞区域内均匀布设了5个像控点及6个用于检核精度的点。使用手机导航就近选择合适位置布上标靶。测量标靶点使用Trimble R2 GNSS接收机进行RTK测量,每个点测量2次取平均值作为最终结果。在测量标靶点的同时,项目组还在测区内随机分散采集了几十个特征点用于检验成图精度,如图1所示。

图1
2.1.3 起降场地及航飞时段的选取
作业前,首先在Goolgle Earth上选取了几个可能作为无人机起降的地点,并作标记。在到达测区后,进行实地考察后发现只有测区北边的一块空地符合起降要求,最后决定此处为整个测区的起降场地。
作业区间天气情况不稳定,经常有阵雨,笔者择机选择天气晴朗、能见度高、微风的情况进行航飞。在经过2天的时间完成了航飞的数据采集。如图2所示。

图2
2.1.4 起飞前检查及准备
起飞前检查、准备工作主要有无人机配件检查、弹射架的组装。Trimble UX5 HP无人机无需额外进行组装,软件操作简单,飞行前检查只需按照软件提示操作即可,最后把无人机固定在弹射架上,确定起飞场地无障碍物后择机起飞。无人机自动按照规划航线飞行无需人工干预,飞行结束后按照预定降落位置滑降到指定位置。
2.1.5 数据完整性检查
回收飞机后,按照提示下载飞行记录数据及照片。分别打开照片并放大到最大,观察照片是否清晰、色彩是否饱满,确定无误后结合飞行记录数据进行数据完整性检查。如上述步骤都满足要求则进行下个架次的数据采集,直至整个测区航飞数据采集完成。
2.1.6 地面扫描数据采集
对测区内的房屋建筑及山上部分检查点采用了Trimble SX10扫描全站仪进行采集,Trimble SX10影像扫描仪为测绘、工程领域提供完美的解决方案并重新定义了日常测量设备的能力。Trimble SX10能够采集任意组合的高密度3D扫描数据、增效Trimble VISIONTM影像和高精度全站仪数据,节省人力、物力、财力。
首先利用RTK在测区采集若干个图根点以方便SX10进行仪器架设及定向,对测区范围内所有房屋建筑进行了扫描及全景拍照。对部分无法通过扫描的房角点用免棱镜进行测量。如图3所示。

图3
2.2 内业数据处理
2.2.1 影像数据处理
使用Trimble Business Center软件将无人机机POS数据进行PPK后处理,得出准确的POS数据。然后通过UASMaster软件进行影像处理,得到DOM、DSM及点云。具体流程如图4、图5所示。

图4
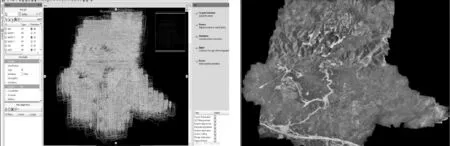
图5
2.2.2 地形图的制作
对于此次项目地形图的制作,项目组应用了一种新的方法以代替传统的手轮脚盘。应用到的软件包括南方CASS、Virtual Surveyor及Trimble Business Center。具体解决方案如下:
(1) 通过Virtual Surveyor软件加载DSM及DOM生成虚拟三维模型,利用LOW point功能,软件自动寻找山上地面点,准确率可达85%,再通过人工编辑得出准确的DEM。通过虚拟三维模型画出测区内的陡坎及斜坡。如图6所示。
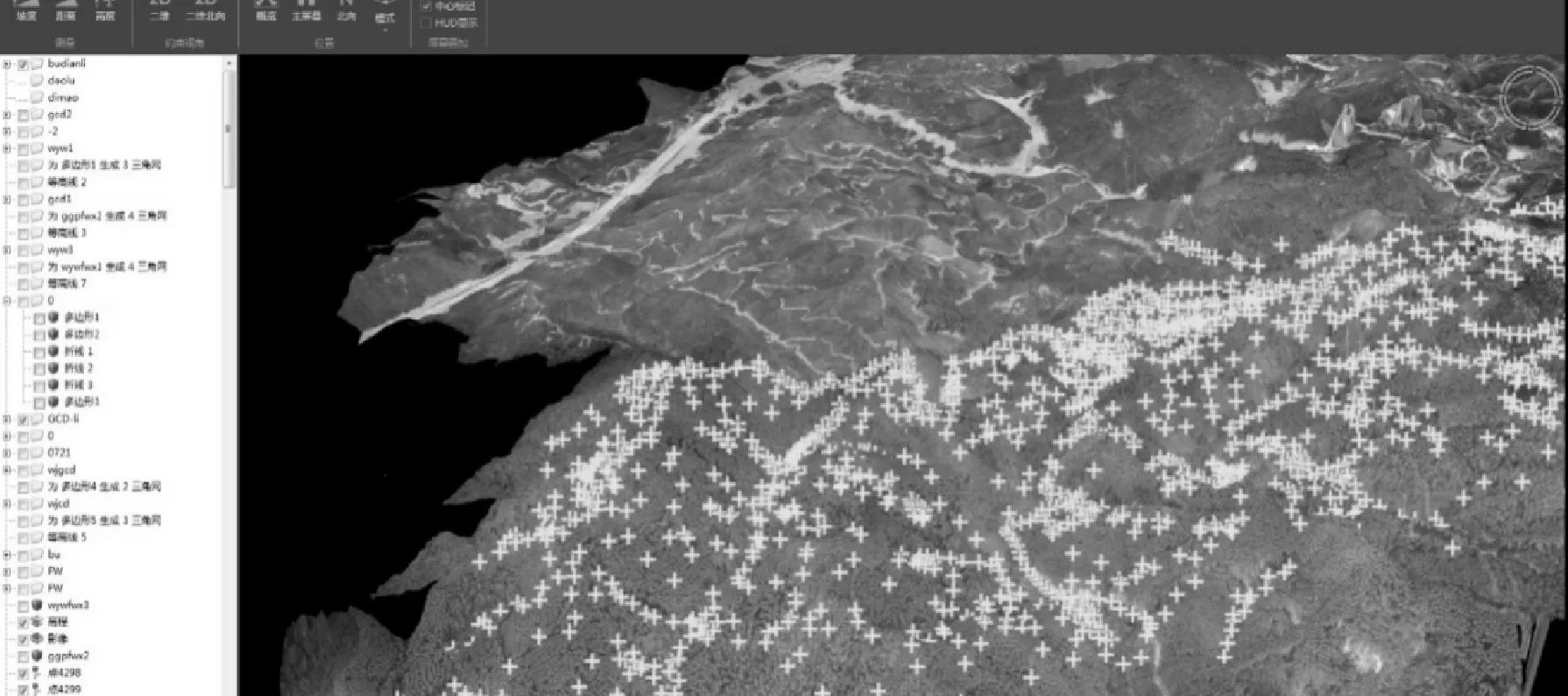
图6
(2) 在TBC软件中加载SX10扫描数据,在三维环境下勾画出房角点。如图7所示。
(3) 最后把在Virtual Surveyor软件中采集的DEM及陡坎、斜坡,TBC采集的房角及属性一起导入CASS软件中。并在CASS软件加载分幅后的影像图作为底图,通过影像图勾绘出道路、地物等平面地形,最后汇总成地形图。如图8所示。
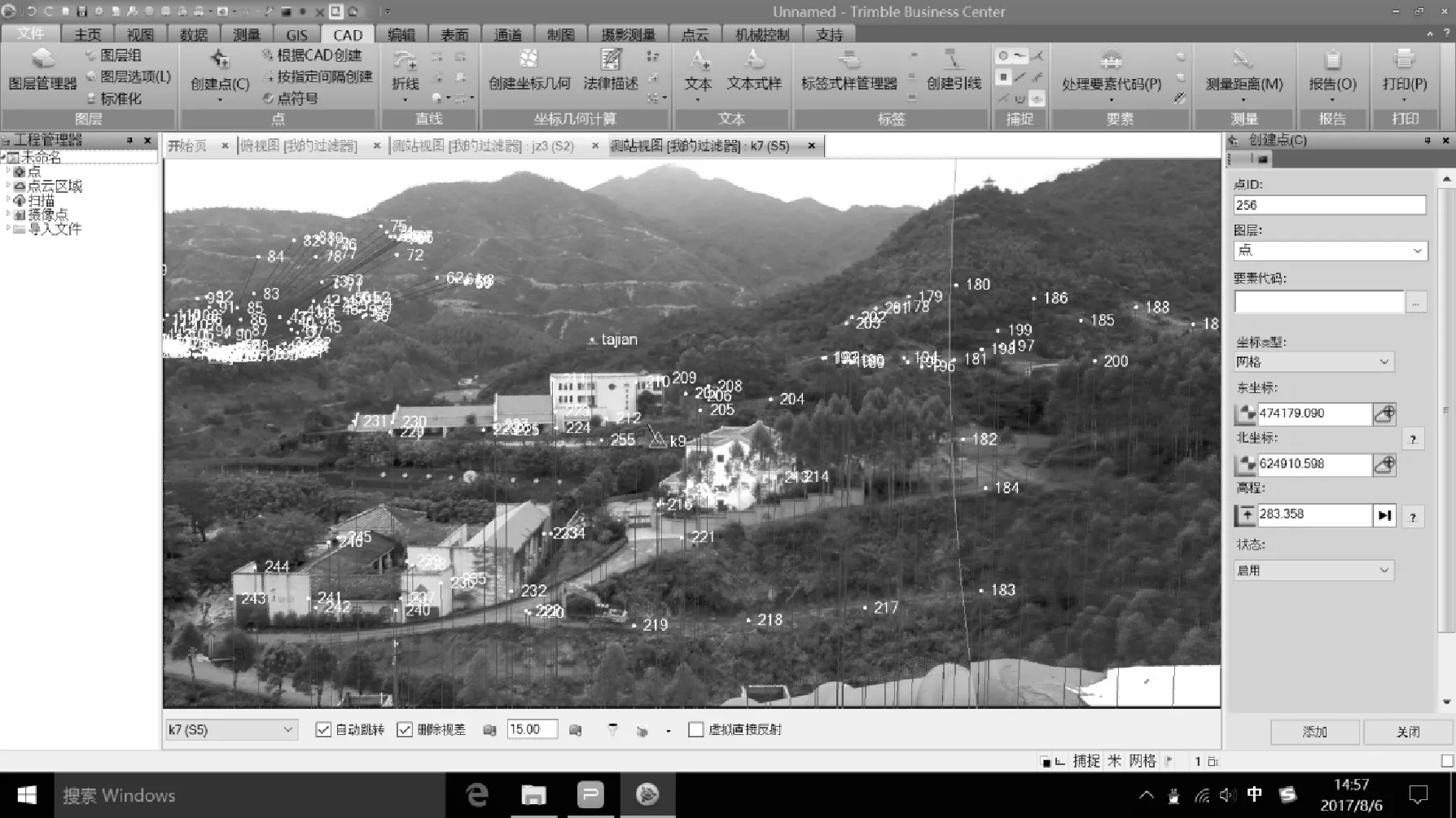
图7
3 精度评定
平面和高程精度评定时18个检核点均匀分布在测区的范围之内,将外业实测坐标与正射影像上测量坐标列表并且对比,得到对比表,见表1。
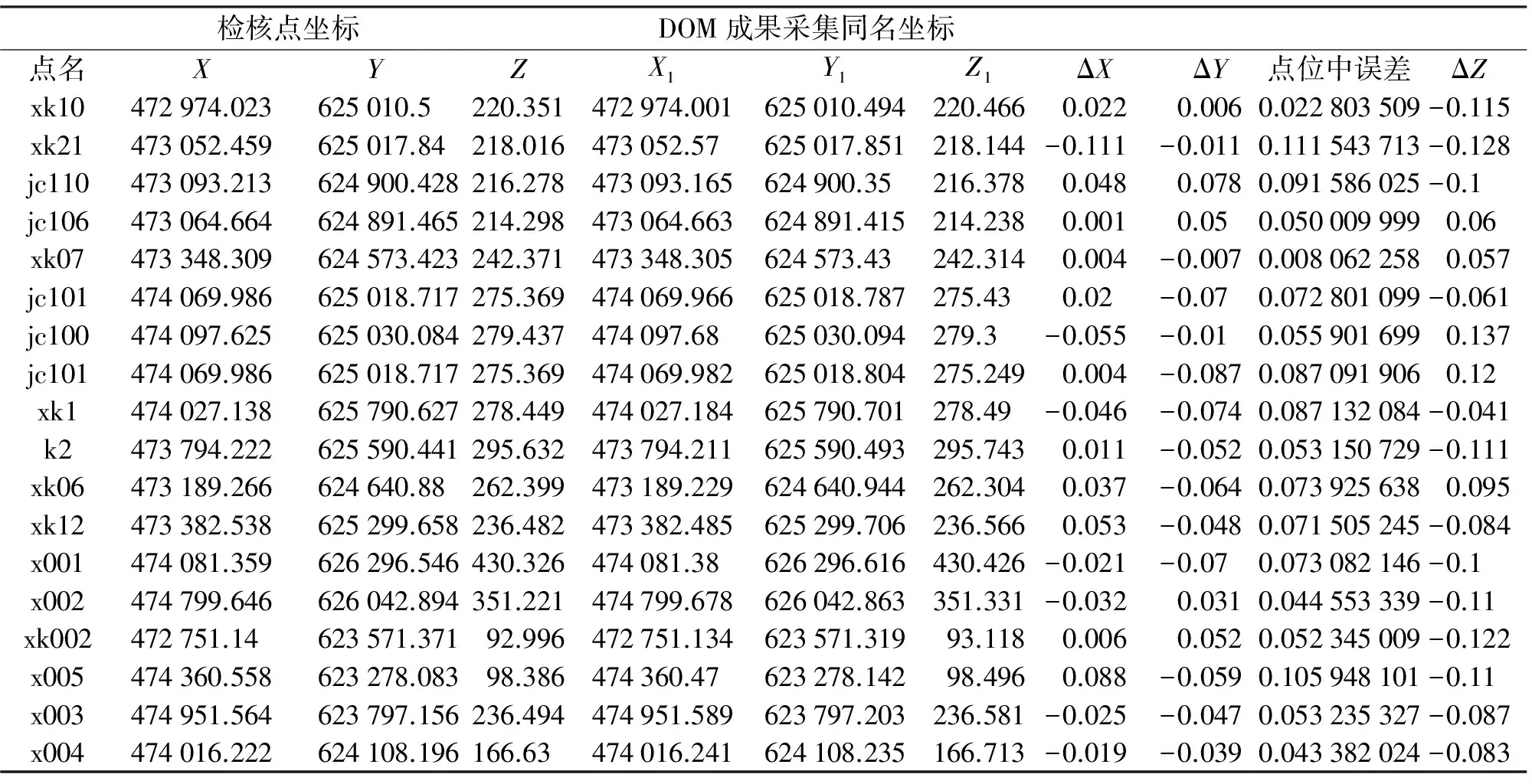
检核点坐标DOM成果采集同名坐标点名XYZX1Y1Z1ΔXΔY点位中误差ΔZxk10472974.023625010.5220.351472974.001625010.494220.4660.0220.0060.022803509-0.115xk21473052.459625017.84218.016473052.57625017.851218.144-0.111-0.0110.111543713-0.128jc110473093.213624900.428216.278473093.165624900.35216.3780.0480.0780.091586025-0.1jc106473064.664624891.465214.298473064.663624891.415214.2380.0010.050.0500099990.06xk07473348.309624573.423242.371473348.305624573.43242.3140.004-0.0070.0080622580.057jc101474069.986625018.717275.369474069.966625018.787275.430.02-0.070.072801099-0.061jc100474097.625625030.084279.437474097.68625030.094279.3-0.055-0.010.0559016990.137jc101474069.986625018.717275.369474069.982625018.804275.2490.004-0.0870.0870919060.12xk1474027.138625790.627278.449474027.184625790.701278.49-0.046-0.0740.087132084-0.041k2473794.222625590.441295.632473794.211625590.493295.7430.011-0.0520.053150729-0.111xk06473189.266624640.88262.399473189.229624640.944262.3040.037-0.0640.0739256380.095xk12473382.538625299.658236.482473382.485625299.706236.5660.053-0.0480.071505245-0.084x001474081.359626296.546430.326474081.38626296.616430.426-0.021-0.070.073082146-0.1x002474799.646626042.894351.221474799.678626042.863351.331-0.0320.0310.044553339-0.11xk002472751.14623571.37192.996472751.134623571.31993.1180.0060.0520.052345009-0.122x005474360.558623278.08398.386474360.47623278.14298.4960.088-0.0590.105948101-0.11x003474951.564623797.156236.494474951.589623797.203236.581-0.025-0.0470.053235327-0.087x004474016.222624108.196166.63474016.241624108.235166.713-0.019-0.0390.043382024-0.083
依据规范,由此计算出点位中误差为10 cm以内,符合规范对1∶1000的要求。
4 结 语
本次尝试了利用无人机航空摄影测量和地面影像扫描系统进行空地一体化作业模式,经过验证,这种模式弥补了无人机航测在大比例尺地形测量中对房屋建筑这方面的精度缺陷。由UASMaster软件生成DOM及DSM,导入Virtual Surveyor软件进行高程点及陡坎采集,由TBC软件利用扫描仪数据进行房屋建筑房角采集,最后汇总到CASS软件制作地形图。其优点是:内业人员不必在接受复杂的手轮脚盘采集训练,只要有点外业测图经验,即可快速上手,在地形复杂、等高线密集的地区,此方法比传统方式便捷高效。这种空地一体化、全方位、多角度的数据采集,为测区的数字建档及后期的运营维护管理奠定了坚实的基础,为现有景观建筑的测绘、规划利用及多维数据成果展示提供了全套的解决方案。
[1] 李兵,岳京宪,李和军.无人机摄影测量技术的探索与应用研究[J].北京:北京测绘,2008(1):1-3.
[2] 国家测绘地理信息局.1∶500 1∶1000 1∶2000地形图航空摄影测量外业规范:GB/T 7931—2008[S].北京:中国标准出版社,2008.
[3] 涂梨平,肖斌,蒋文秀.基于INPHO无人机航空摄影在大比例尺地形测图中的应用[J].中国科技纵横,2013(22):35-36.
[4] 罗联聪.利用无人机航空像片进行大比例尺测图的探讨[J].中小企业管理与科技, 2014(7):201-202.
[5] 刘丰.无人机大比例尺地形图测量技术研究[J].科技资讯,2014,13(6):51-52.
[6] 曾义星.三维镭射扫描技术及其在工程测量上之应用[J].台湾成功大学学报, 2002(3).
[7] 李必军,方志祥,任娟.从激光扫描数据中进行建筑物特征提取研究[J].武汉大学学报(信息科学版),2003,28(1):65-70.
[8] 郑德华,沈云中,刘春.三维激光扫描仪及其测量误差影响因素分析[J].测绘工程,2005,14(2):32-34.
[9] 廖丽琼,罗德安.地面激光雷达的数据处理及其精度分析[J].测绘, 2004,27(4):153-155.
[10] 李子坡,李晓静.三维激光扫描仪在地形测量中的应用[J].科技与企业,2013(22):249-250.
[11] 詹长根,唐祥云,刘丽.地籍测量学[M].2版.武汉:武汉大学出版社,2005.
