基于空间智能体的交通信号灯模型构建
2018-03-06朱艳慧田根曹
朱艳慧田 根曹 敏
(1.南京师范大学虚拟地理环境教育部重点实验室,江苏 南京210023;2.河南理工大学资源环境学院地科系,河南 焦作454003)
0 引 言
交通拥堵已成为影响我国城市经济发展的一个重要因素,现代化交通控制可以有效缓解这些城市交通问题。智能交通信号灯的控制是现代化交通控制的重要内容之一。国外在交通信号灯智能控制方面的研究开始较早,如Taale等[1]在1998年使用一种改进的遗传算法优化交通信号灯控制,实现了一个单路口控制器。Moriarty和Langley[2]在1998年使用强化学习来实现分布式控制。我国智能控制方面的研究起步较晚,赵小军等[3]提出,依靠东西向和南北向两方向车辆的差值对交通信号灯时长方案进行动态调整。叶尔江·哈立木[4]提出根据计算出的车辆预计通行时间对交通信号灯时长进行调整。
根据我国目前交通信号灯现状,基于各个方向车辆差值对信号灯时长进行调整的可行性较大。对于不同差值所对应的秒数变化,在不同信号灯模拟中有不同界定。本文采用空间多智能体思想,基于Netlogo多智能体建模平台,构建了交通信号灯模型。通过对一特定车流情况下信号灯不同时长设置情况进行模拟,对比不同时长设置情况下车辆的等待数目最终得到较优方案。
1 基于空间智能体的模型构建
1.1 Netlogo介绍
Netlogo是由美国西北大学网络和计算机建模中心推出的基于多智能体的可编程建模平台。基于计算机建模和仿真软件包,它能对自然系统和社会系统进行仿真,尤其适合于随时间演变的复杂系统建模[5]。在Netlogo中,智能体分为海龟,瓦片和观察员3类:仿真世界由前两类构建,仿真模型中的环境由瓦片构成,海龟可以代表现实世界中任何一种具有活动特性的物体;观察员则可以控制模型的运行(图1)。在Netlogo中,不同海龟之间,海龟与瓦片之间可以进行相互作用,即海龟可以通过判断周围环境以及周围其他海龟的状态来更新自己的状态。在交通信号灯模拟中,信号灯和车辆都视为海龟,而道路视为瓦片。车辆通过判断前方车辆的速度对自己速度进行调整,即不同海龟之间的交互作用;车辆通过道路判断是否能通行,即海龟与瓦片之间的相互作用。
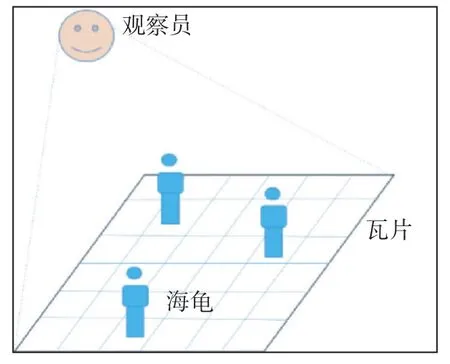
图1 三种智能体关系图
1.2 基于Netlogo的交通信号灯模型构建
在信号灯模型中,瓦片定义了模型的背景区域,信号灯和车辆为海龟,通过模型界面的进度条对信号灯时长进行控制。模型由八个进度条分别对两个方向、四种类型的信号灯进行控制。四种类型分别为东西向左转信号灯、东西向直行信号灯、南北向左转信号灯、南北向直行信号灯。每种类型信号灯由两个进度条分别对其红灯时长和绿灯时长进行控制(图2)。
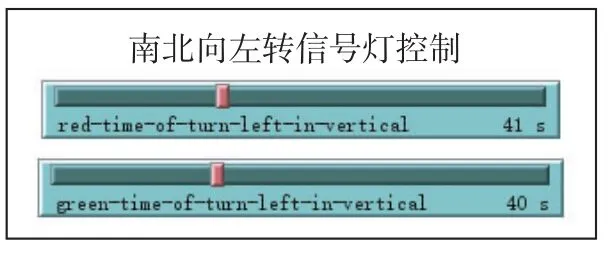
图2 南北向左转信号灯控制进度条
车辆分为东西向和南北向两种类型,可通过进度条对车辆数量进行调整(图3)。模型中车辆的速度是随机的。根据现实统计情况,车辆通过路口的时间约为8~12 s。依据软件中ticks与现实时间的统一,对车辆在软件中的速度进行模拟。

图3 车辆控制进度条
模型中存在海龟与瓦片、海龟与海龟之间的交互。海龟通过与瓦片的交互判断自己的所在位置,以此确定自己的行驶状态,如是否可以转弯。海龟与海龟之间的交互分为两类,一类是汽车类海龟同类之间的相互作用,另一类为汽车类海龟与信号灯类海龟的交互(图4)。汽车类海龟之间的交互可以对车辆速度进行控制,当后车速度大于前车时,判断是否能超车,否则降低自己的速度。如果前方车辆的速度为零,即为等待情况,则将该车速度也设置为零。汽车类海龟与信号灯类海龟的交互可以是车辆对信号灯的状态进行感知,以此确定能否通过路口区域。
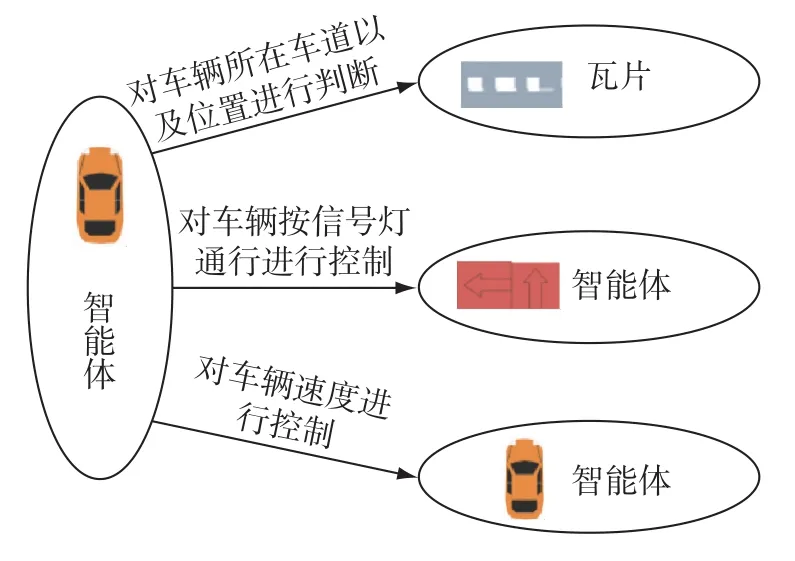
图4 各类智能体之间的交互关系
为对模型进行动态检测,添加了图像区域以及数据监视器区域(图5)。
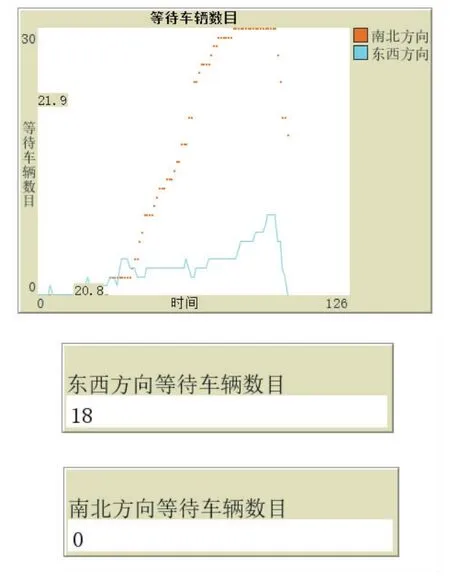
图5 等待车辆数量图及数据监视器
等待车辆数量图中蓝色实线代表南北等待车辆数量,红色虚线代表南北向等待车辆数量。数据监视器由东西向等待车辆数量监视器和南北向数据监视器构成。等待车辆数量为统计模型当前时刻下速度为零的车辆总数量。
2 模型的实现与结果分析
本文所构建的交通信号灯模型总体实现界面如下所示(图6)。
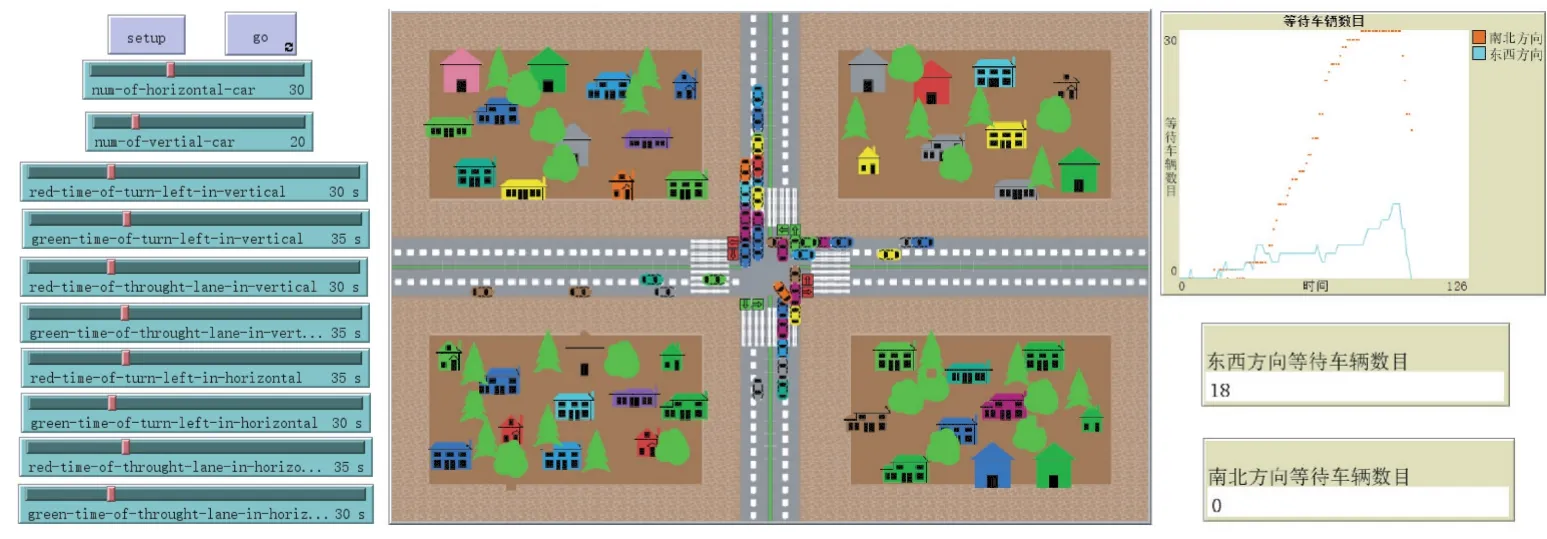
图6 模型运行界面图
本文假设某时段车辆总数为50辆,其中东西向车辆为35辆,南北向车辆为15辆,该地区初始红灯时长和绿灯时长均为30 s。设定车辆数量多的方向绿灯时长分别延长0 s,5 s,10 s,分别运行三种方案下交通信号灯模型,并对模型模拟的等待车辆数目进行统计分析(图7)。
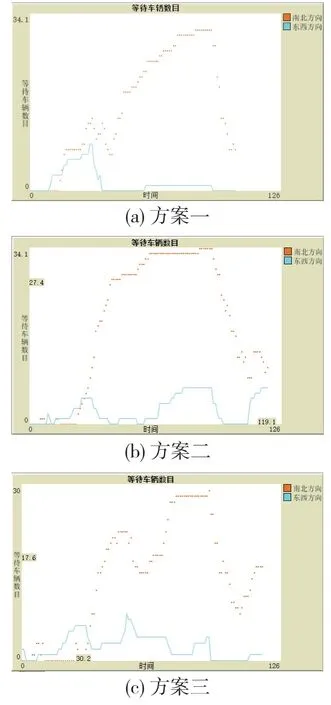
图7 三种方案统计图对比
在一定时间间隔内,将每时刻等待车辆数目相加,得到所有车辆的等待时间总和。20 s内所有车辆等待时间总和方案一、二、三的统计结果分别为2 034 s、1 949 s、1 879 s。结果表明:方案三为最优,即当车辆数目为50辆,东西向与南北向车辆数量差值为15 h,将车辆数量较多的方向的绿灯时长延长10 s,可以缩短所有车辆等待时间总和。在120 s的运行中,通过信号灯调整,可以将车辆总等待时长减少约155 s。
3 结 语
(1)采用空间智能体建模方法,基于Netlogo建模平台,构建了交通信号灯的模型。模型中定义车辆和信号灯为海龟智能体,定义道路为瓦片智能体。通过智能体之间的交互,对车辆智能体进行控制,通过调节进度条,改变输入参数,对信号灯智能体进行控制。根据对输入模型参数的调整,该模型可以模拟各种不同车流量情况下多种信号灯配时方案,统计在一定时间间隔内每秒车辆的等待数量,得到所有车辆的总体等待时间,选择等待时间最小的作为最优方案。本文设定车辆数目为50辆,东西向与南北向车辆数量差值为15,通过对比得到,在此情况下将车辆较多方向绿灯时长延长10 s可得相对较优方案
(2)在我国,目前交通信号灯大部分仍处于固定时长的控制方式,通过该方法可以有效验证交通信号灯配时方案的合理性,有助于确定较为合理的交通信号灯配时方案。
[1]Taale H.,Bäck T.,PreußM.,et al.,Optimizing traffic light controllers by means of evolutionary algorithms[C].Aachen:ELITE Foundation,1998:1730-1734.
[2]Moriarty D.E.,Langley P.,Learning cooperative lane selection strategies for highways[C].Madison Wisconsin:Proceedings of the Fifteenth National Conference on Artificial Intelligence,1998:684-691.
[3]赵小军,胡耀增,林晨.基于车流量的交通信号灯实时控制的研究[J].计算机与现代化,2012(10):72-75.
[4]叶尔江·哈力木,曼苏乐,张秀彬.交通信号灯智能控制算法研究[J].微型电脑应用,2012,28(6):42-44.
[5]王扬扬.基于Agent的轨道交通通道内行人行为研究和通道优化[D].北京:北京交通大学,2015.
