SuperPATH微创与常规入路行全髋关节置换术的早期疗效比较
2018-03-06乔高山朱成栋朱乐银印文彩万春宝
乔高山 朱成栋*朱乐银 印文彩 万春宝
全髋关节置换术(total hip arthroplasty,THA)已有上百年发展历史,能够解除疼痛,恢复髋关节功能和日常生活自理,已在临床上得到广泛应用[1]。近年来,全髋关节置换术向微创化方向发展[2]。我科 2015年始对髋关节疾患行SuperPATH微创人工全髋关节置换术,与常规入路比较,取得满意效果。
1 资料与方法
1.1 一般资料
选取2015年11月~2016年10月我科收治的60例THA患者。纳入标准:股骨颈骨折、股骨头坏死、骨性关节炎,新鲜股骨颈骨折患者受伤至手术时间2~5天,平均3天。排除重度肥胖、关节畸形、关节僵硬者。根据手术入路不同分为:SuperPATH入路组和常规后外侧入路组。两组情况一般资料有可比性(见表1)。
1.2 手术方法
常规后外侧入路THA(常规组)采用陶瓷-聚乙烯、非骨水泥型假体。SuperPATH入路THA(SuperPATH组)采用专用假体,手术方法:侧卧位,切口起自大转子尖端向近端,长约6cm~8cm。切开皮肤、皮下组织,顺臀大肌纤维方向钝性分离臀大肌,双翼牵开器撑开臀大肌,Cobb拉钩拉开臀中肌,自臀小肌和梨状肌间隙进入,钝性Hohmann拉钩拉开臀小肌及梨状肌,显露、切开关节囊。于梨状窝顶点开口,插入髓腔锉行股骨扩髓,沿髓腔锉斜面行股骨颈截骨,取出股骨头后置入股骨柄假体。通过髋臼导向器经皮穿刺置入套管到主切口内,建立工作通道,通过套管将手柄与髋臼锉匹配连接,磨锉髋臼,置入髋臼假体。置入合适的组配式股骨颈、股骨头假体,复位髋关节。冲洗后完整修复关节囊,逐层缝合至皮肤。
1.3 术后处理
常规组:术后分腿夹枕卧床1周,术后三个月常规限制一些活动:自由翻身、侧卧、坐矮凳等。SuperPATH组:术后无需分腿固定,患者清醒后即可床上主动直腿抬高及屈伸踝关节,6 h后起在医生指导下下床活动,术后常规口服非甾体类解热镇痛药。
1.4 观察指标
观察两组患者的切口长度、手术时间、术中出血量、输血量、术后24h疼痛视觉模拟VAS评分、术后6月Haris评分。
1.5 统计学方法
数据采用SPSS20.0统计学软件进行分析,计量资料采用(±s)表示,组间均数比较采用t检验,计数资料采用2检验,P<0.05为差异有统计学意义。
2 结果
SuperPATH组的切口长度、术中出血量、输血量与常规组比较,差异均有统计学意义(P<0.05)(见表2)。SuperPATH组术后24h VAS评分低于常规组,两组患者术后髋臼角测量、术后 6个月 Harris评分比较,差异均无统计学意义(P>0.05)(见表3)。典型病例(见图1-2)。
典型病例
患者,女,66岁,左侧股骨颈骨折。
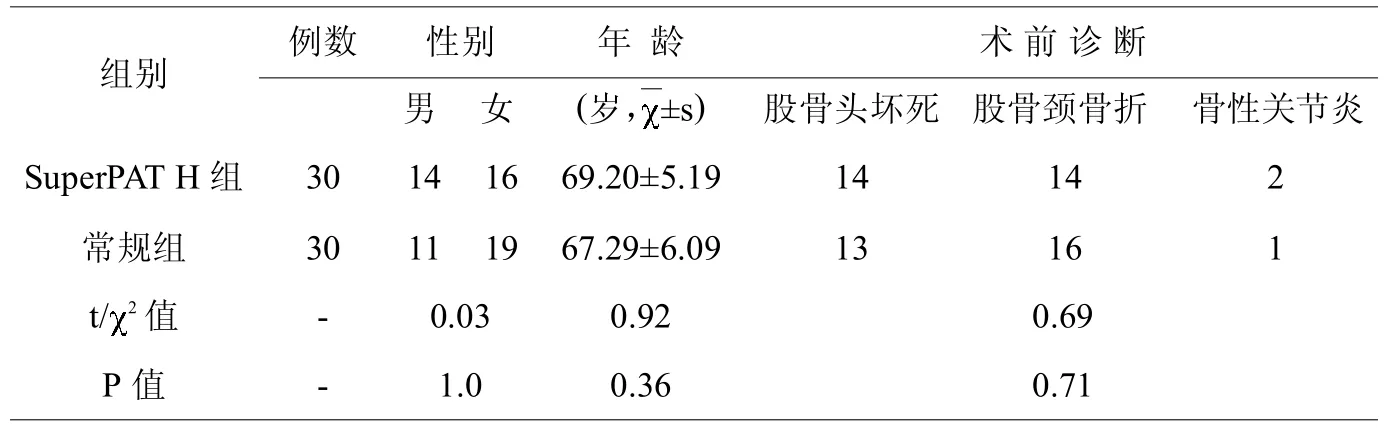
表1,两组术前一般资料比较

表2,两组术中情况比较

表3,两组术后情况比较
X线片,假体位置良好。
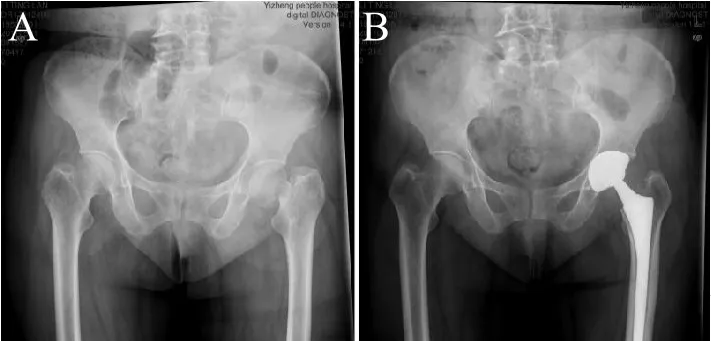
图 1,A 术前X线片左侧股骨颈骨折,头下型,(Garden IV型);B采用SuperPATH微创THA术后

图2,患者术后6个月髋关节功能。A下蹲位;B翘二郎腿位。
3 讨论
3.1 SuperPATH入路的优点
后外侧入路为人工全髋关节置换术常规入路,手术视野好,操作方便,但需要切断外旋肌肉、手术创伤大、失血多、术后脱位发生率高、康复慢[3]。2011年JamesChow博士结合SuperCap入路和PATH入路两种技术优势,提出了SuperPATH技术[4]:经皮辅助穿刺,保留关节囊,保留外旋肌群的THA。SuperPATH入路具有以下优点:创伤小,不切断外旋肌群,保留前后关节囊的完整,具有更好的即刻前后稳定性,术后发生脱位风险明显降低[5];出血少,Super-PATH术中磨臼及扩髓之外,无需肌肉切断及关节脱位,术中出血量少,输血量少,降低了围手术期风险[6];疼痛明显减轻。SuperPATH微创THA由于创伤小,术后通过口服止痛药即可有效控制术后疼痛[7]。本组结果显示:SuperPATH较常规入路 THA手术切口小、术中出血量少、输血量少、术后疼痛轻,下床活动早。两组早期随访过程中均未发生脱位、股骨近端骨折、感染、下肢深静脉血栓等并发症。
3.2 SuperPATH入路的缺点
SuperPATH入路虽然保留了髋关节周围的外展外旋肌群和关节囊,具有更好的即刻前后稳定性,能够降低术后脱位的风险。然而,假体位置仍然是THA术后影响早期脱位的重要因素[8]。SuperPATH微创THA与常规入路有很大的不同,上方关节囊入路股骨侧处理,由于非脱位状态下,无小转子参考,股骨假体前倾的判断有一定困难;经皮通道髋臼侧处理,由于股骨的遮挡,髋臼假体置入错位率较高[9]。再加上切口小导致视野差、安放假体难度较大,会比常规入路THA更加导致假体位置不佳。本组研究早期1例影像检查结果显示位置不良。
3.3 SuperPATH入路手术操作体会
经皮切口套管通道建立时,通过导向器即注意前倾和外展角。磨髋臼时,骨钩插入髓腔锉将股骨牵向前方,使用SuperPATH 专用瞄准器维持外展角(40±10)°、前倾角(15±10)°。假体置入时,利用髋臼解剖标准点确定髋臼假体位置。Lewinnek等[9]认为术中臼杯前倾角达 5°~ 25°、外展角达30°~50°,术后脱位发生率最低。
股骨侧处理时股骨头保留在原位,沿着患者自然股骨颈解剖角度,髓腔锉位于股骨颈前后壁中间行髓腔成形,置入股骨假体符合生理解剖前倾;股骨颈骨折患者可参考梨状窝至股骨距最大径;另外,屈膝90°小腿竖直向上通过髓腔锉连杆和股骨的位置来判断前倾。SuperPATH人工关节假体为组配式假体,通过选择股骨颈假体的长度和角度,调整股骨头旋转中心,平衡肢体长度,使联合前倾角在25°~45°左右[10]。手术结束前摄X线片,确认假体置入位置良好。
总之,SuperPATH微创全髋关节置换创伤小,围手术期出血少,更少的术后疼痛,更好的髋周肌力保护和恢复,良好的后方软组织即刻关节稳定性。但 SuperPATH入路存在安放假体难度相对较大,易致假体位置不佳等不足。对于初学者而言,既要熟悉 SuperPATH手术入路,更要掌握关节假体的精准安装技巧。
[1] Learmonth ID,Young C,Rorabeck C.The operation of the century:Total hip replacement[J].Lancet,2007,370(9597):1508-1519.
[2] 方忠,熊伟,廖晖,等.Metha短柄全髋关节置换术的早期临床疗效观察[J].生物骨科材料与临床研究,2015,12(03):27-30.
[3] Della Torre PK,Fitch DA,Chow JC.Supercapsular percutaneously-assisted total hip arthroplasty:radiographic outcomes and surgical technique[J].Ann Transl Med,2015,3(13):180.
[4] James chow,Brad Penenberg,Stephen Murphy.Modified microsuperior percutaneously-assisted total hip:early experiences&case reports[J].Curr Rev Musculoskelet Med,2011,4:146-150.
[5] Capuano N,Del Buono A,Maffulli N.Tissue preserving total hip arthroplasty using superior capsulotomy[J].Oper Orthop Traummatol,2015,27(4):334-341.
[6] Rasuli KJ,Gofton W.Percutaneously assistedtotalhip(PATH)and Supercapsular percutaneously assisted total hip(SuperPATH)arthroplasty:learning curves and early outcomes[J].Ann transl Med,2015,3(13):179.
[7] Cardenas-Nylander C,Bellotti V,Astarita E,et al.Innovative approach in total hip arthroplasty;supercapsular percutaneously-assisted[J].Hip Int,2016,26(Suppl 1):34-37.
[8] Weeden SH,Paprosky WG,bowling JW.The early dislocationrate in primary total hip arthroplasty following the posterior approach with posterior soft-tissue repair[J].JArthroplasty,2003,18(6):709.
[9] Lewinnek GE,Lewis JL,Tarr R,et al.Dislocations after total hipreplacement arthroplasties[J].J Bone Joint Surg(Am),1978,60(2):217-220.
[10]Widmer KH,Zurfluh B.Compliant positioning of total hip components for optimal rang of motion[J].J Orthop Res,2004,22(4):815-821.
