一种改进的OMP算法及其在图像重构上的应用
2018-03-05石曼曼
石曼曼,李 雷
(南京邮电大学 理学院,江苏 南京 210023)
0 引 言
传统的信号采样建立于奈奎斯特(Nyquist)定理上。其要求采样速度必须超过原始信号两倍频宽,才能恢复出原始信号。随着数字信号处理的迅猛发展,待处理的信号越来越多,导致传输的压力过大。因此,迫切需要一种全新的采样方式,去满足采集存储信息的要求。于是,压缩感知(compressed sensing,CS)[1-2]理论应运而生。
CS与奈奎斯特取样不同的是,它利用了信号更多的信息,包含稀疏性和相干性,不再受带宽的限制,实现取样、压缩一体化,不仅节省了存储空间,而且降低了元件损耗的风险。目前,CS广泛应用于遥感成像[3]、医疗成像[4]、无线传感网络[5]、雷达成像[6]等众多领域。
重构是CS技术关键的一步,主要有三大类方法[7],包括最小l1范数的凸松弛算法、贪婪算法以及组合算法。凸松弛算法包含基追踪(basic pursuit,BP)算法[8]、基于梯度投影的一类算法[9]等等。贪婪算法基于最小l0范数,包含正交匹配追踪(orthogonal matching pursuit,OMP)[10]、正则化的正交匹配追踪(regularized orthogonal matching pursuit,ROMP)[11]以及压缩采样匹配追踪(compressive sampling matching pursuit,CoSaMP)[12]等算法。组合算法是通过分组测试实现快速重构。因每一类算法在重构耗时和重构结果上各有利弊,不少学者针对算法的各种缺点进行优化[13-14]。
贪婪算法凭借重构速度快的优势,得到了广泛的应用。其中OMP算法采用自下而上的方式更新,在未得到最终解时通过预设某个起始解,但是重构时间较长,重构精确度不高。OMP作为经典的贪婪算法之一,目前有很多学者对其进行了改进[15-17]。在此基础上,文中针对OMP算法重构时间慢、重构效果不好的缺点,加入双阈值,在OMP迭代至残差小于第一阈值后引入回溯思想,采用CoSaMP继续更新,直至残差小于第二阈值。将OMP的优点和回溯思想相结合,通过双阈值分阶段调控迭代,提出改进的双阈值分段迭代匹配追踪(DTSIMP)算法。
1 压缩感知理论
相比于奈奎斯特采样定理,CS利用观测矩阵直接得到可压缩或稀疏信号的特征信息。
假设x是一维离散随机信号,稀疏度为K,长度为N,即x∈RN×1。对于x,线性观测过程能用某个M×N维随机矩阵Φ表示(M≪N),通过投影能够观测到M×1维列向量y,即
y=Φx
(1)
在这一过程中Φ是不变的,因此观测过程并非自适应过程。由式(1)可知,需要求解一个含M个等式的线性方程组。但由于M≪N,即方程个数远大于未知数个数,因此式(1)有无穷多解。若已知x的稀疏度为K≪M,也就是说x中含N-K个零项,同时已知位置,由CS知,这个欠定问题能够得到解决。只要观测矩阵Φ符合约束等距(restricted isometry property,RIP)[1]特征,即Φ满足下式:

(2)
其中,ε∈(0,1),那么能够由y来获得K个稀疏观测。
将式(1)转化为l0范数极小化问题,求解得到原始信号,即:

(3)
在实际求解过程中,一般转化为次最优问题求解。即:
min‖x‖0s.t. ‖y-Φx‖2<δ
(4)
用贪婪算法求解此类问题,重构精度会略有降低,但缩短了运行时间,和其他类算法相比,具有更广泛的应用。
2 双阈值分段迭代匹配追踪算法
2.1 匹配追踪类算法
贪婪追踪匹配算法,采用多次迭代的思想,利用不同的特定准则实现迭代,最终通过特定的迭代终止条件,以观测矩阵作为原子库,从中判断筛选出能够准确表达原始信号的原子。由这些匹配原子经计算得到最优稀疏解。这类算法的最大特点是重构速度快,重建时间短。
OMP算法需要已知信号的稀疏度。在每一步迭代时,均从观测矩阵中选取与当前残差内积最大的原子,将其加入到支撑集,然后求解最小二乘,更新残差,进入下一次迭代。不妨假设信号是K稀疏的,则更新次数为K次。因为OMP算法在迭代中仅挑选唯一的原子来扩充支撑集,虽然得到的原子大部分是准确的,但会增大重构时间。且原子一旦并入支撑集,无论该原子是否准确,都只能保留。文中针对此缺点引入双阈值,并将迭代分为两部分,引入回溯思想,从而实现精准快速重构。
2.2 双阈值分段迭代匹配追踪算法
OMP算法每步更新只筛选出唯一原子加入支撑集,且加入的原子不能剔除,导致精度降低、耗时增加。而且作为一种经典的贪婪算法,其重构精度也有很大的提升空间。因此文中考虑改变OMP算法迭代的过程。为了不增加算法复杂度,第一阶段利用OMP算法迭代若干次,迭代停止阈值为α,然后引入回溯思想,利用CoSaMP算法更新,并将OMP更新所得残差和原子集当作第二阶段的输入值,第二阶段迭代停止阈值为δ,且δ<α,从而缩短重建耗时,实现准确重建。新算法步骤如下:
输入:观测矩阵Φ,观测向量y,信号稀疏度K,阈值δ;




改进算法在残差不小于第一阈值α的条件下用OMP算法求解,之后引入回溯思想,采用CoSaMP算法迭代,用上一次更新得到的残差和原子集作为第二阶段初始值,并且通过第二阈值来终止迭代。且OMP算法迭代选择出的原子大部分是精确的,从而回溯过程开始时,会因为初始输入的精确性,使得信号得以快速重建,因此新算法是可行的。
3 实验结果和性能分析
给出不同算法的重构性能对比,以此分析算法的性能。实验对象为一维离散随机信号和二维图像。实验结果为各算法在相同实验条件下运行200次取平均所得。
3.1 重构性能分析
为了验证算法的有效性及优越性,在给定的采样率下,给出一维高斯随机信号的OMP与文中算法的重构成功率和重构时间与稀疏度的关系,并对仿真结果进行分析。
3.1.1 重构成功率分析
重构对象为一维高斯随机信号,长度N=256,测量矩阵Φ:M×N为高斯随机矩阵,分别用OMP算法和文中算法进行重构。第一阈值为α,第二阈值为δ,在大量实验基础下,均衡重构时间和精度,取α=6×10-3*‖y‖2,δ=10-5*‖y‖2。采样率取0.5时,两种算法在改变稀疏度的情况下,重构成功率如图1所示。
由图1可知,随稀疏度的增加两种算法的重构成功率均降低,但文中算法的实验结果优于OMP算法。和OMP算法相比,新算法重构成功率大幅提高。稀疏度为40时,用OMP恢复出x的成功率约为60%,但文中算法对x恢复的成功率仍接近100%;当稀疏度为50时,OMP算法对应恢复信号成功率小于20%,无法保证重构成功,但文中算法依旧有90%以上的重构成功率,可见新算法具备成功重建信号的优势。
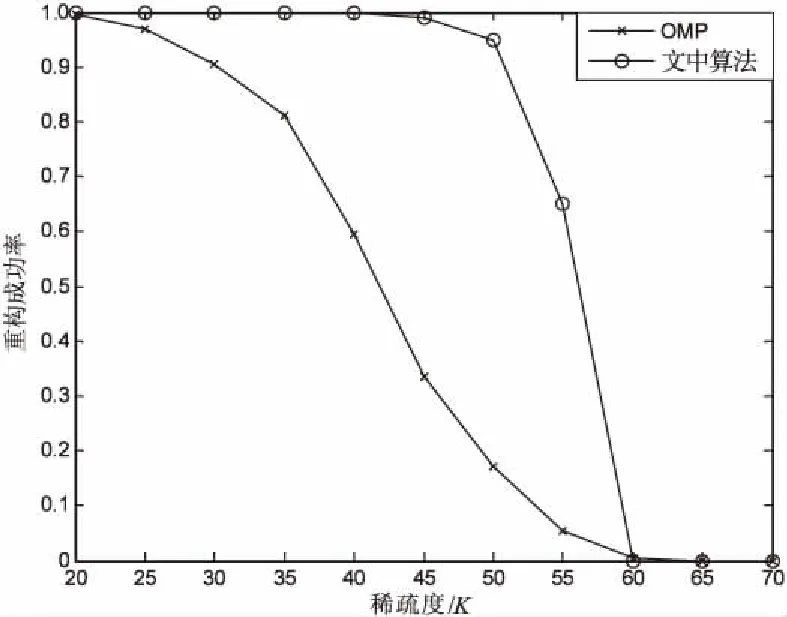
图1 重构成功率和稀疏度关系对比
3.1.2 重构运行时间比较
采样率相同时,给出文中算法和OMP算法重构所需时间与稀疏度的关系曲线,如图2所示,其中采样率取0.5。

图2 重构时间和稀疏度关系对比
由图2可知,稀疏度增大时,OMP和改进算法运行时间均有所增加,但新算法增加缓慢且重构时间比OMP算法少。这是因为文中算法采用双阈值两阶段迭代。首先,OMP算法迭代若干次之后,通过第一阈值控制进入第二阶段迭代;其次,引入回溯思想,使其快速正确地挑选原子,并由第二阈值约束控制,算法收敛时间变短。跟OMP算法比较,改进算法不仅具有很强的重构成功率,而且恢复速度快。
3.2 改进OMP算法在图像上的应用
将文中算法用于二维图像的重构,实验对象为256×256的Lena标准灰度图像。首先用DWT基对图像稀疏表示,之后用高斯随机矩阵线性观测,得到观测值,分别用三种算法重构,采样率取0.5,实验结果见图3。
由图3不难看出,文中算法的重建结果更接近原始图像,而OMP和CoSaMP重建的某些部分较为模糊,因此文中算法在图像上的重构也是可行且效果较好。

图3 重构效果对比图
表1和表2分别在采样率取0.5、0.6和0.7时,对比了不同算法的重构时间和峰值信噪比(PSNR)。

表1 重构时间和采样率的关系 s
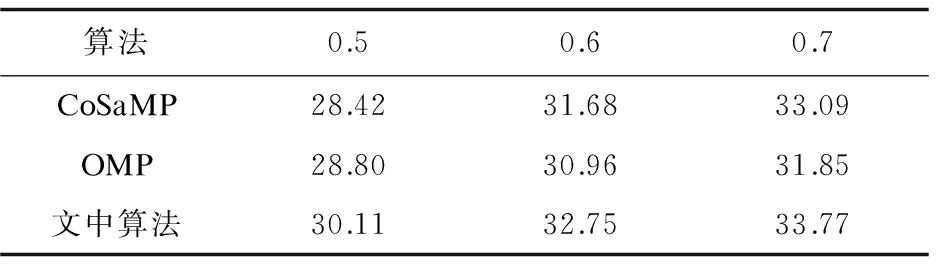
表2 峰值信噪比和采样率的关系 dB
由表1可知,随采样率的增大,三种算法重构时间变长,但文中算法在采样率相同时,耗时均最短,较CoSaMP算法耗时大幅减少,也比OMP算法平均快2 s,算法的速度快、耗时短。
由表2可知,随采样率的增加,PSNR增大,即图像恢复的更好。相同采样率时,文中算法的PSNR值略高于CoSaMP算法,且平均比OMP算法高出1 dB,重建结果最好。结合表1表明,文中算法重构性能更好。
4 结束语
提出了一种改进的OMP算法,利用双阈值两阶段控制迭代。首先利用OMP算法迭代若干次,至残差小于第一阈值时引入回溯思想,采用CoSaMP继续更新,残差小于第二阈值时停止迭代,从而精确快速地重构出稀疏信号。实验结果表明,与OMP算法相比,文中算法对一维的随机高斯信号和二维图像信号的重构成功率高,重构迅速且重构效果好。
[1] KUTYNIOK G.Compressed sensing:theory and applications[M].[s.l.]:Cambridge University Press,2012.
[2] 邵文泽,韦志辉.压缩感知基本理论:回顾与展望[J].中国图象图形学报,2012,17(1):1-12.
[3] 李烈辰,李道京.基于压缩感知的连续场景稀疏阵列SAR三维成像[J].电子与信息学报,2014,36(9):2166-2172.
[4] LIU Y,ZHAN Z,CAI J,et al.Projected iterative soft-thresholding algorithm for tight frames in compressed sensing magnetic resonance imaging[J].IEEE Transactions on Medical Imaging,2016,35(9):2130-2140.
[5] 黄海平,陈九天,王汝传,等.无线传感器网络中基于数据融合树的压缩感知算法[J].电子与信息学报,2014,36(10):2364-2369.
[6] 李少东,杨 军,陈文峰,等.基于压缩感知理论的雷达成像技术与应用研究进展[J].电子与信息学报,2016,38(2):495-508.
[7] 刘 芳,武 娇,杨淑媛,等.结构化压缩感知研究进展[J].自动化学报,2013,39(12):1980-1995.
[8] 张小亚,张 慧,王红霞.基追踪问题的近点算法及其应用研究[J].计算机工程与科学,2016,38(1):120-124.
[9] 张本鑫,朱志斌.全变差图像恢复的自适应步长梯度投影算法[J].自动化学报,2016,42(9):1347-1355.
[10] 刘记红,黎 湘,徐少坤,等.基于改进正交匹配追踪算法的压缩感知雷达成像方法[J].电子与信息学报,2012,34(6):1344-1350.
[11] NEEDELL D,VERSHYNIN R.Signal recovery from inaccurate and incomplete measurements via regularized orthogonal matching pursuit[J].IEEE Journal of Selected Topics in Signal Processing,2010,4(2):310-316.
[12] 蒋留兵,黄 韬.一种新的压缩采样匹配追踪算法[J].计算机应用研究,2013,30(2):402-404.
[13] 刘盼盼,李 雷,王浩宇.压缩感知中基于变尺度法的贪婪重构算法的研究[J].通信学报,2014,35(12):98-105.
[14] 陈善雄,何中市,熊海灵,等.一种基于压缩感知的无线传感信号重构算法[J].计算机学报,2015,38(3):614-624.
[15] 曾春艳.匹配追踪的最佳原子选择策略和压缩感知盲稀疏度重建算法改进[D].广州:华南理工大学,2013.
[16] 石曼曼,李 雷.基于分段可调节OMP算法的图像压缩感知算法[J].计算机技术与发展,2016,26(11):14-18.
[17] ZHANG D,ZHANG Y,HU X,et al.Fast OMP algorithm for 3D parameters super-resolution estimation in bistatic MIMO radar[J].Electronics Letters,2016,52(13):1164-1166.