全自动相位差法声速测量装置的研制与探讨
2018-03-03石明吉宋金璠郭新峰
石明吉,宋金璠,郭新峰
(南阳理工学院 电子与电气工程学院,河南 南阳 473004)
声波是在弹性媒质中传播的纵波,随着超声学研究的迅速发展,声学检测在实际应用中已越来越广泛,对超声波传播速度的测量在超声波测距、无损检测、定位、测量气体温度瞬间变化等方面具有重大意义[1]. 超声波具有波长短、可定向的优点,因此,常被用作测量声速[2]. 目前,大学物理实验中的声速测量方法主要有2种:驻波法(也叫共振干涉法)和相位比较法[3]. 相位比较法因为准确度高而应用更加普遍,传统的相位比较法声速测量需要寻找李萨如图形为直线的位置,通常的做法是用连接示波器的声波接收器在被测区域内逐处测量,一边移动声波接收器一边观察示波器,当示波器显示一三象限或二四象限直线时,停止移动声波接收器,将该点的位置读数记录下来. 然后重复上述操作,直到找到8~12个目标位置. 在寻点过程中,因为相位差没有数字化,只能用眼睛观察,不容易找准一三象限或二四象限直线的位置. 如果声波接收器反向移动,就会存在回程差,所以寻点效率特别低[4-5]. 为改进相位比较法的缺陷,让相位比较法成为既简单又准确的声速测量方法,笔者研制了全自动相位差声速测量装置. 利用AD8302模块实现了相位差的数字化[6];利用单片机、步进电机、步进电机驱动器,采集卡和上位机提高了测量的效率和测量的精度,消除了回程差的影响.
1 相位比较法测量空气中声速的原理
按照波动理论,在声波的传播方向上的任何两点,如果振动状态相同或者其相位差是2π的整数倍,这两点间的距离就是波长的整数倍. 实验采用图1所示实验装置. 从声波发射器S1发出的超声波通过空气到达声波接收器S2,在发射波和接收波之间产生相位差为
φ=2πl/λ.
(1)
式中,l是声波发射器与声波接收器之间的距离,λ是波长. 可见,若要使相位差改变2π,那么声波发射器与声波接收器之间的距离l就要相应地改变λ. 沿声波传播方向移动接收器时,总可以找到某位置使得接收到的信号与发射器的激励电信号同相位(相位差是2π的整数倍). 继续移动接收器,直到找到的信号再次与发射器的激励信号同相位时,移过的这段距离就等于声波的波长λ. 由信号发生器可读出频率f,即可算出声速v=λf,这种方法就是相位比较法[7].
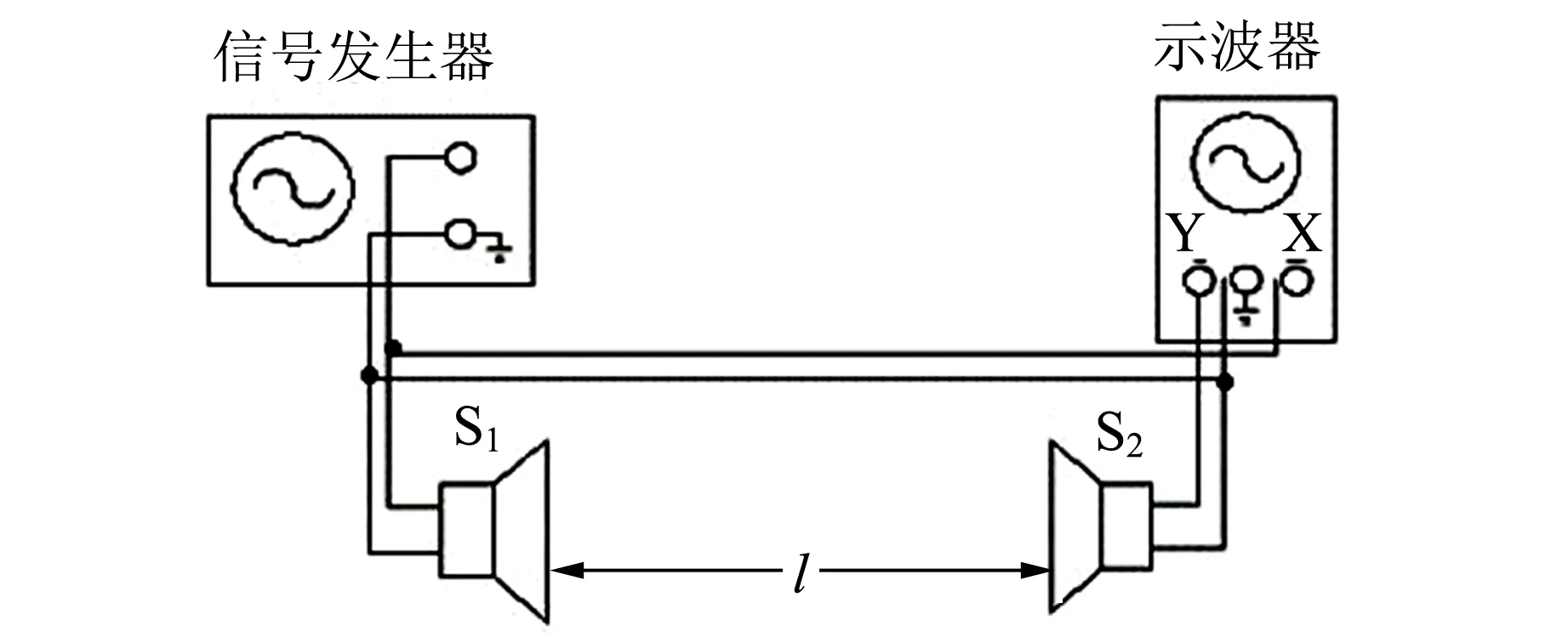
图1 相位比较法测量声速装置示意图
2 整体设计
全自动相位差法声速测量装置由数据采集系统、声波接收器移动系统和上位机3部分构成,如图2所示. 数据采集系统由声波接收器、AD8302模块、数据采集卡、待测声波场、电源1(给AD8302模块供电)和电源2(给采集卡和步进电机驱动器供电)组成. 声波发射器固定到丝杠导轨的固定块上,声波发生器与信号发生器的输出端相连. 待测声波场的媒质是空气. 声波接收器移动系统由STC89C52单片机、步进电机驱动器、步进电机、丝杠导轨(加载有声波接收器)和电源2构成. 声波接收器利用接收器支架锁定在丝杠的滑块上. 声波接收器要插入并锁定在接收器支架上,声波接收器端面的法线方向要与丝杠的轴向刚好平行;声波接收器的高度与声波发生器的高度要相同. 将信号发生器产生的激励信号和接收器接收的信号分别接到AD8302模块的INPA和INPB,由AD8302模块的PHASE端输出与两信号相位差成反比的电压信号. 上位机控制系统利用C语言编程,通过步进电机驱动器控制步进电机的转动,利用步进电机带动丝杠导轨运动,从而实现声波接收器的运动;通过数据采集卡获得AD8302输出的电压数据,利用软件画图,给出相位差变化与接收器位置的关系图,并保存数据和图片.

图2 全自动相位差法声速测量装置的结构框图
3 实验结果与分析
实验时温度为15 ℃,谐振频率为38.61 kHz,设定数据的采集周期为300 ms,数据点为4 000个. 利用步进电机驱动器的细分功能,将步进电机的步距角设为0.9°,丝杆的导程为4 mm,因此步进电机每走一步,声波接收器移动0.01 mm. 测试开始前,发射器与接收器之间的距离约为4 cm;测试过程中,二者逐渐远离. 将全自动相位差法声速测量装置生成的Excel数据用Origin软件处理,可得到AD8302输出的电压变化与声波接收器位置的关系,如图3所示.

图3 AD8302输出电压随接收器位置的变化

v=λf=343.63 m/s.
(2)
已知声速在标准大气压下与传播介质空气的温度关系为[8]
vs=331.45+0.59t.
(3)

此外,图3中后3个峰两端出现了伴峰,尤其是第5个峰的两侧,伴峰非常明显.
4 结束语
全自动相位差法声速测量装置利用AD8302模块实现了相位差测量的数字化;利用单片机、步进电机,步进电机驱动器和滚珠丝杠实现了声波接收器运动的自动化;利用上位机和采集卡实现了数据采集的自动化. 在提高测量精度的同时,消除了回程误差,提高了数据采集的效率. 采集实验数据的同时,上位机实时绘出相位差变化与接收器位置关系图. 本装置原理简单、成本低廉、容易操作、效果直观.
[1] 谢春香,张禹涛,黄笃之. 非简谐波对声速测量的影响[J]. 湖南科技大学学报(自然科学版), 2013,28(1):120-123.
[2] 孙金林,王国余,胡方圆. 数字化智能声速测量系统设计[J]. 传感器与微系统,2015,34(10):114-117,127.
[3] 杨志云. 驻波法与相位比较法测声速实验探讨[J]. 产业与科技论坛,2011,10(7):86-87.
[4] 刘石劬. 声速测量及不确定度分析[J]. 大学物理实验, 2013,26(4):99-103.
[5] 张俊玲. 驻波法测量声速实验的系统误差分析[J]. 大学物理实验,2012,25(5):81-83.
[6] 花添雨,封维忠,孙成忠. 基于AD8302的相位差法测声速[J]. 物理实验,2017,37(8):11-13.
[7] 陈兰莉. 大学物理实验[M]. 上海:上海交通大学出版社,2013:245-250.
[8] 张续文,李万金. 计算机辅助测量声速的设计研究[J]. 六盘水师范学院学报,2013,25(2):81-85.