基于Matlab的RV减速器回差计算分析
2018-03-02杨瑞超董红卫
杨瑞超,李 良,董红卫
(西安航天精密机电研究所,陕西 西安 710100)
0 引言
RV减速器是目前在工业机器人关节中应用最为广泛的两种减速装置之一(另一种为谐波减速器)[1]。RV传动是在摆线针轮传动基础上发展起来的一种多级、大速比行星式传动。它采用共用曲柄轴和中心圆盘支撑的结构形式组成封闭式差动传动,使其具有传动比大、刚度大、运动精度高、传动效率高、回差小、传动平稳等优点[2]。
回差是指输入轴反向转动时,输出轴在运动上滞后于输入轴的现象。根据产生的原因,回差可以分为三大类:几何回差、温度回差和弹性回差。本文仅分析几何回差:单纯由于传动件几何尺寸、形状方面的原因所产生的回差。
应用于工业机器人关节中的RV减速器对回差有着较高的要求,一般要求不超过1′。RV减速器公差设计的过程,就是要把1′的许用回差分配到各个零件的公差中。为此,就必须先搞清楚各零件尺寸公差对RV减速器回差的影响。
1 回差模型建立
RV减速器是由渐开线齿轮行星传动和摆线针轮行星传动组成的封闭差动轮系,其结构如图1所示。
从其结构可以看出,RV减速器总的回差是由渐开线齿轮行星传动引起的回差和摆线针轮传动引起的回差两部分合成。摆线针轮传动部分的回差会直接反映到输出轴的回差,影响程度较大,而渐开线齿轮传动对整机回差的影响还要考虑一个传动比,因而影响要小得多[3]。下面针对各主要影响因素分析其对整机回差的影响。
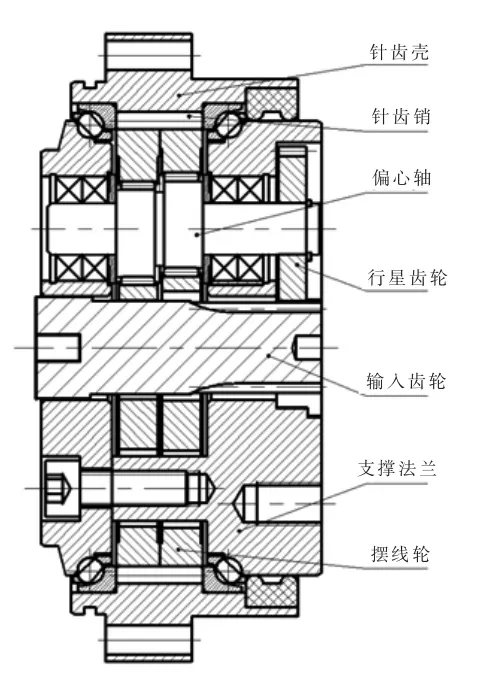
图1 RV减速器结构图Fig.1 Structure of RV reducer
1.1 渐开线传动级回差计算模型
在渐开线齿轮传动级中,影响该部分回差的主要因素有[4]:①公法线长度平均偏差引起的齿轮侧隙;②中心距偏差引起的齿轮侧隙;③齿轮齿圈径向跳动引起的齿轮侧隙;④齿轮轴线平行度误差引起的齿轮侧隙;⑤齿轮径向综合误差引起的齿轮侧隙(包括齿形误差、周节极限偏差);⑥滚动轴承偏心引起的齿轮侧隙;⑦键与槽的间隙引起的齿轮侧隙。
(1)公法线长度平均偏差△EW对输出轴回差的影响。由于△EW一般取负值,公法线长度平均偏差造成的减速器回差。

式中:△EW—公法线长度平均偏差;α—齿轮压力角;BtEw—公法线长度平均偏差引起的输出轴回差(′);r1—渐开线中心轮分度圆半径(mm);i—RV传动的传动比。
(2)中心距偏差对输出轴回差的影响。中心距偏差造成的减速器回差为:


(3)齿圈径向跳动误差△Fr对输出轴回差的影响。齿圈径向跳动造成的减速器回差为:

式中:BtFr—齿圈径向跳动造成的输出轴回差 (′);△Fr—齿圈径向跳动误差。
其余影响因素的计算模型在此不进行详细介绍,具体可参阅文献[5]。
因此,渐开线传动部分的总回差为:

1.2 摆线针轮传动级回差计算模型
摆线针轮行星传动在实际应用时,为补偿制造误差,通常会对摆线轮进行一定的修形。同时,由于装配关系复杂,会形成一定的装配间隙。因此,影响摆线针轮传动部分回差的因素较多,主要误差因素有[4]:①摆线轮修形引起的啮合间隙;②摆线轮修形误差引起的侧隙;③针齿中心圆半径误差引起的侧隙;④针齿销半径误差引起的侧隙;⑤针齿销与针齿销孔配合间隙;⑥摆线轮齿圈径向圆跳动引起的侧隙;⑦针齿销孔圆周位置度引起的侧隙;⑧摆线轮周节累积误差引起的侧隙;⑨曲柄轴承的间隙引起的侧隙。
(1)摆线轮修形对输出轴回差的影响。移距修形的方法是将磨轮向工作台中心移动一个距离△rp,因此针齿中心圆半径将缩小为rp-△rp。等距修形的是将磨轮半径由标准的rrp增大到rrp-△rrp。转角修形量大小就是由其所造成回差的大小。根据摆线轮的几何关系可推出,三种修形方式引起的输出轴回差为:

实际应用中,一般采取移距加等距修形的方式,故上式中第三项可不予考虑。
(2)针齿中心圆半径误差对输出轴回差的影响。针齿中心圆半径误差与移距修形对回差的影响相似,故针齿中心圆半径误差引起的输出轴回差为:

(3)摆线轮周节累积误差对输出轴回差的影响。摆线轮周节累积误差是由单个齿距偏差引起的累积偏差,其引起的输出轴回差为:

式中:△Fp—摆线轮周节累积误差(mm)。
(4)曲柄轴承间隙对输出轴回差的影响。当RV减速器曲柄轴承存在游隙时,摆线轮啮合转动后,必须先消除轴承游隙的影响才能够引起输出,消除轴承游隙所引起的输出轴回差为:

摆线针轮传动级其余因素的计算模型在此不进行详细介绍,具体参阅文献[5]。
根据以上各数学模型,摆线针轮传动部分的总回差为

1.3 RV减速器总回差概率计算
RV减速器总的输出轴回差是渐开线传动和摆线针轮传动部分引起的回差的代数和,即RV减速器总的回差为:

回差可以采用概率统计的方法进行计算。由于各误差不可能同时取最大或最小,因此采用概率统计的方法可以避免因极值计算而导致的精度选择上的浪费,计算也更贴近实际。
根据工程经验可知,机械加工误差一般服从正态分布,而偏心类误差基本服从瑞利分布。根据误差所服从的分布可以得出各误差的均值和方差。
回差分常值回差和可变回差,需分开计算。单个齿轮的常值回差Bc的计算公式如下:

单个齿轮由于偏心造成的可变回差Bv的计算公式为:

式中:μi、σi—偏心的单独径向分布参数。
整个传动链总的输出轴可变回差是通过把各偏心误差造成的输出轴回差相加求得的,即:

而整个传动链的总回差是常值回差和可变回差两部分的统计结果之和,计算公式如下:

RV减速器总的输出轴回差可通过下式计算

2 RV减速器回差各影响因素的敏感性分析
2.1 敏感性分析原理
对于函数 Y=Y(x1,x2,…,xn),当 xi存在误差△xi,并在较小的情况下按泰勒级数展开,略去高阶偏导项,可得到误差计算方程式为;

对上式两边同时减去 Y(x1,x2,…,xn),可得 Y=Y(x1,x2,…,xn)在(x1,x2,…,xn)处的误差△Y 为:

一般,将敏感性指数定义为:

上式中的∂Y/∂x0是作为参照的一个误差参数,即参照的误差参数的敏感性指数为1,而其它误差参数的敏感性指数与参照误差参数的比较。通过敏感性指数的计算,可以得出各误差参数△xi对函数结果△Y的贡献大小,从而可以确定对函数影响最大的误差参数。当xi的值确定时,偏导数∂Y/∂xi为常数,因而上式可写为:

同样,敏感性指数也可表示为

2.2 RV减速器回差各误差因素的敏感性计算
前述得出了各误差因素对输出轴回差影响的计算公式,可以看出影响回差的因素非常多,但各因素对输出轴回差的影响程度却差别较大。本节的敏感性分析就是要了解各误差因素对输出轴回差的影响程度,并在设计制造过程中加以控制对回差影响较大的因素。
以项目组设计的RV-20E-81型减速器的设计参数为例,敏感性指数计算所使用的基本参数如表1所示。根据前述所建立的RV减速器各因素对输出轴回差影响的数学模型,以针齿中心圆半径误差作为参照,按照敏感性分析原理,计算RV减速器各误差因素的敏感性指数如表2所示。

表1 RV-20E-81减速器基本参数Tab.1 Basic parameters of RV-20E-81 reducer

表2 RV-20E-81减速器回差因素敏感性指数Tab.2 Sensitivity indexes of backlash factors for RV-20E-81 reducer
3 计算实例
根据前述所建立的RV减速器回差概率计算模型,利用科学计算软件Matlab编写相应计算程序,并利用Matlab软件的GUI模块编制出操作界面。可以在操作界面上快速调整尺寸公差值,并实现一键式计算。以项目组设计的RV-20E-81型减速器为例,计算其回差。列出减速器传动链的设计细则如表3和表4所示,其中行星齿轮与偏心轴联接采用矩形花键过盈联接。
将RV-20E-81减速器的基本参数以及上述设计细则输入计算程序中,计算界面如图2所示,可以看出计算出的总回差为 3.59(″)~73.12(″),说明所设计的 RV-20E-81减速器满足回差要求。

表3 渐开线传动级设计细则(单位:μm)Tab.3 Design details of involute transmission(unit:μm)

表4 摆线针轮传动级设计细则(单位:μm)Tab.4 Design details of cycloid transmission(unit:μm)
从计算实例可以看出,所编制的RV减速器回差计算软件非常实用,在RV减速器设计阶段,利用回差计算软件结合前面所做的误差敏感性分析,通过调整对输出轴回差影响较大的因素,可以快速的得出合适的公差分配,可以有效的提高设计效率。
4 结论

图2 RV减速器回差计算软件界面Fig.2 Backlash calculation software for RV reducer
本文详细介绍了RV减速器的回差影响因素,应用概率统计的方法建立了RV减速器的计算模型。并对RV减速器回差各误差因素作了敏感性分析,得出了各误差因素对RV减速器输出轴回差的影响关系。以项目组设计的RV-20E-81型减速器为例,应用概率统计的方法计算出了该型减速器的回差。编制了RV减速器回差计算软件,利用该软件结合敏感性分析可以快速实现各零件的公差分配,可以有效的提高设计效率。
[1]吴俊飞,周桂莲,付平.机器人关节驱动装置的研究进展[J].山东:青岛化工学院学报,2002,2.
[2]何卫东,李欣,李力行.机器人用高精度RV传动中摆线轮修形对回差影响的研究[J].机械传动,1999,1.
[3]机械设计手册编委会.机械设计手册:单行本轮系(4版)[M]..北京:机械工业出版社,2007.
[4]Sun Y G,Zhao X F,Jiang F,et al.Backlash analysis of RV reducer based on Error Factor Sensitivity and Monte-Carlo Simulation[J].International Journal of Hybrid Information Technology,2014,2.
[5]朱孝录.齿轮传动设计手册[M].北京:化学工业出版社,2005.
[6]竹振旭,董海军,韩林山,等.基于灵敏度分析方法的摆线针轮传动精度研究[J].机械科学与技术,2008,5.
[7]贡林欢,左健民.基于权重法的RV减速器公差设计[J].机械传动,2008,7.
