儿童智能玩具的交互模型研究
2018-03-02展延蕊
展延蕊,张 昆
(中国矿业大学,江苏 徐州 221000)
0 引言
随着人工智能技术的不断发展,智能玩具市场迅速膨胀,越来越多的智能玩具走进了儿童的生活中。然而智能玩具市场同质化严重且缺乏创造性,导致儿童使用过程中的体验性较差[1],不能很好地娱乐身心;另外,儿童在不同年龄阶段其认知能力与运动能力也大有不同,很多智能玩具在玩耍中都不符合相应儿童的身心特点。因此,建立儿童智能玩具的交互系统模型并分析信息处理过程,找出其中影响交互和谐的要素能更好地满足儿童的个性化需求,让智能玩具真正给儿童带来快乐和知识。
1 儿童智能玩具
1950年Johan Huizinga的著作《人类和玩耍》(《Homo Ludens》)中提出:“玩”是人类的天性,是人类的特质,是人类文化的根,是所有神话和宗教仪式的基础,是艺术、文学、法律、商业、科学等所有文明力量的潜在推动力[2]。玩具是游戏的物质载体,毫无疑问,对儿童的成长发展起到重大作用。
智能玩具其集高科技、教育与娱乐特性于一体,改变了儿童的生活方式,给儿童带来了不同以往的体验。智能玩具种类非常多,市面上常见的智能玩具种类主要有:陪伴对话机器人类(小优机器人、乐城机器人等)、动作类机器人类(会跳舞的阿尔法机器人等)、平板类(菲比精灵、小熊尼奥的AR卡片等)、故事机与学习机类(铁皮人科技的小鸡叫叫等)以及STEM类编程机器人类(乐高头脑风暴等)。智能玩具不仅拥有考究的外观,同时拥有多种应用功能,像人一样灵活可沟通。智能玩具简单地说就是将人工智能技术运用到玩具中供儿童游戏的工具,帮助儿童将想象和思维转化成行为,促进儿童认知以及运动能力的发展,在儿童成长过程中起到了寓教于乐的作用。
所谓智能即系统有以下三点功能:①学习功能。类似人的学习过程,系统对一个过程或未知环境所提供的信息进行识别、记忆、学习并利用积累的经验进一步改善系统的功能;②适应功能。这种适应能力不仅仅包括对输入输出自适应估计,还包括故障情况下自修复等;③组织功能。对于复杂任务和分布的传感信息,系统具有主动且灵活的自组织和协调功能[3]。
2 儿童智能玩具的交互模型构建
交互是指以输入输出装置为媒介,数字系统和用户之间发生的信息交换过程[4]。儿童与智能玩具的交互中存在一个相互作用的“面”,称为用户界面(User Interface)[5],人机之间的信息交流和控制活动都发生在这个界面上,处理好智能玩具软硬件与儿童的关系对交互的成功至关重要。儿童与智能玩具之间的交互就是人机信息传递,从信息论的基本观点来看,这种反应过程就是信息在儿童和智能玩具内的流动过程。其交互模型详见图1。
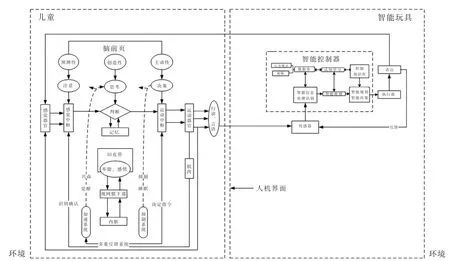
图1 儿童智能玩具交互模型Fig.1 Interactive module for children and intelligent toys
3 儿童智能玩具的交互系统分析
3.1 儿童信息处理系统
儿童对信息的处理就是输入—处理—输出的过程。儿童的交互行为分为认知行为和动作行为两个部分。认知行为是指儿童对智能玩具在某一时刻状态的识别、理解、分析,经过判断并发出指令的行为;动作行为是指肌体各运动器官执行指令的行为[6]。
有关智能玩具状态的信息,通过输出设备输入人的感觉器官包括眼、耳、鼻、舌、皮肤等。人的感觉器官各有其特点、优点和适应能力,其中最常用的是视觉通道和听觉通道。有研究表明,人类从周围世界获取信息约有80%是通过视觉得到的,听觉感知的信息仅次之[7]。儿童的各个感觉通道以及识别的外界信息特征详见表1。

表1 儿童感觉通道及识别的外界信息特征Tab.1 Children’s sensory channeland relevant information
刺激信息随后进入机体神经系统,其中最重要的部分就是中枢神经系统,它由脑和脊髓构成,是接受外界刺激并发出指令的指挥中心,是肌体的决策机构。传入神经纤维负责接受刺激,一些刺激经过神经中枢加工后传出指令给反应器官,而有些反应不需要经过中枢神经系统,其通过周围神经系统直接传出给运动器官。肌体存在复杂的反应器官,由肌肉、腺体完成反应动作,通过肢体动作、发声器官、面部肌肉、眼部动作等形式表现出来,详见图2。
决策是指对刺激信息的处理和加工过程。当代认知心理学认为,人脑是一个信息加工系统,当人处于清醒状态时就会不断地加工处理来自外部环境的信息刺激,该系统主要由以下几个部分组成,分别是感受器、感觉登记、模式识别、短时记忆和长时记忆。儿童通过感觉通道接受来自外界的信息,经过大脑的加工,决策,然后作出反应。儿童信息加工系统如图3所示。
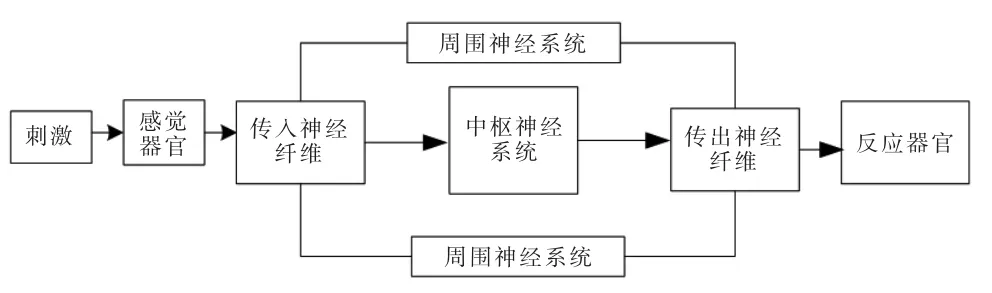
图2 刺激与行为反应系统Fig.2 System of stimulus and behavioral responses

图3 儿童信息加工系统Fig.3 Children’s information processing system
感觉器官的感受器接受刺激信息并将其转换为生物电能后进入人脑内以作进一步的加工处理,首先通过感觉登记以短暂保留接收到的信息,然后通过模式识别,刺激信息被传递到短时记忆系统。模式识别介于感觉登记和短时记忆之间,匹配大脑内部的感觉信息与先前掌握的存储在长时记忆系统中的信息。短时记忆通过向长时记忆复述某种信息形式如意义、形状、使图像、声音等得以在长时记忆系统加工存储[8]。感觉刺激、决策以及反应这三个阶段都离不开注意,它是极其重要的认知要素。其功能主要是是对外界信息进行筛选、过滤,帮助大脑选择需要的信息,并进行加工。注意虽然能够在同一时间同时分配给多种活动,但注意的资源量是有限的,必须在各个阶段合理分配注意,这样才能提高信息处理的效率。另外,记忆系统在儿童信息加工系统中至关重要,记忆是人们学习的基础,分为感觉记忆、短时记忆和长时记忆。其中较为重要的是短时记忆和长时记忆。短时记忆即工作记忆,是人在及时环境中操作性的记忆,是通往长时记忆的过渡阶段,其特点为:①保持时间短;②记忆容量小。长时记忆是信息经过感觉器官进入大脑,变成记忆长期甚至永久储存下来(被意识到、被注意到的信息),并且在将来某个时间点能够再次被回忆起来,其特点为:①能长时间储存、记忆;②记忆容量大,几乎是无限的;③长期记忆相对模糊,可能突出某些情节、忽略其他;④长期记忆主观性较强,受到情境和情绪影响[6]。
人的信息输出通常表现为效应器官的运动,决策系统发出指令后,效应器官作出反应,其运动速度和准确度直接关系到人机系统的效率和可靠性。人的信息输出主要表现为操作运动和言语。操作运动包括肢体动作、面部肌肉、眼部动作等控。其中肢体动作包括上肢、下肢、躯干以及头部动作。上肢主要是手部动作,下肢主要是脚部动作,面部表情是由脸部肌肉的收缩运动引起的,致使眼睛、嘴巴、眉毛等面部特征发生形变[9]。言语是信息输出的又一基本形式,是从内部表象转换为外部语言的过程,主要是控制喉部的肌肉来调节声音的音强、音长、音色和音调,其形式简单方便且实用。这些信息输出与儿童认知能力(感知觉、语言、记忆、注意、思维、情感等)与运动能力(精细动作与大动作)息息相关。
3.2 智能玩具的信息处理系统
信息通过运动和言语输出的形式经智能玩具的输入设备进入智能玩具的传感器。传感器是一种能将化学量和物理量转变成电信号的器件,是智能玩具的“感觉器官”[6],有了传感器,智能玩具就像人一样拥有各种感觉。智能玩具的传感器分为内部传感器和外部传感器,内部传感器主要用来检测各内部系统的状态,如位置、速度、加速度、温度、电机速度、电机载荷、电池电压等,并将所测得的信息作为反馈信息送至智能控制器,形成闭环的控制系统。外部传感器用于感知儿童以及周围环境信息,是智能玩具与外界进行交互获取信息的通道,它可以识别距离、接近程度和接触程度等变量,便于智能玩具进行物体识别和处理。智能玩具的外部传感器是衡量一个智能玩具是否足够“智能”的关键。智能玩具的外部传感器主要8种:
(1)视觉传感器是智能玩具传感器中最重要的之一,其通过视觉传感器获取图像进行分析,智能玩具像人一样拥有视觉,能辨识物体、测量并且判断以及实现定位等。视觉传感器优点十分显著,在智能玩具中运用多个视觉传感器或者与其他传感器搭配使用能获取丰富信息,得到有关物体形状、距离、速度等多种类型信息。
(2)声音传感器在智能玩具中的作用和视觉传感器一样重要,其作用相当于一个话筒,能够接收声波,显示声音的振动图象。声波传感器可以检测声波存在、分析声波频率以及对连续自然语言中单独语音和词汇进行辨别。
(3)拥有距离传感器的智能玩具类似于智能机器人,有着可爱的娃娃造型,其距离传感器有激光测距仪(兼可测角)、声纳传感器等。这几年比较主流的是激光雷达传感器,可用于导航或者躲避障碍物。
(4)触觉传感器的主要类型有:压电式触觉传感器、压阻式阵列触觉传感器、成像型触觉传感器、超大规模集成计算传感器阵列,通过触觉传感器智能玩具能够感知诸如温度、压力、形状、纹理、软硬等物理要素,触觉传感器就像人类的皮肤一样。
(5)接近觉传感器介于触觉和视觉传感器中间,能够测量距离、方位并且融合视觉和触觉信息。一方面智能玩具的接近觉传感器可以帮助视觉系统识别物体形状、位置,另一方面可以帮助触觉系统识别物体的表面材质。其主要作用一是发现智能玩具周围的障碍物,从而限制其活动范围,二是在接触对象物前得到必要信息,比如与物体的相对距离,相对倾角,以便为下一步动作,三是获取物体表面各点间的距离,从而得到有关对象物表面形状的信息。
(6)滑觉传感器主要是用于检测智能玩具与抓握对象间滑移程度,即检测垂直加压方向上的力和位移。滑觉传感器能识别物体表面粗糙度和硬度,在智能玩具抓握物体时,需要确定一个合适的握力,既不损伤物体,又能克服物体重力抓握起来,因此滑觉检测功能是实现智能玩具柔性抓握的必备条件。
(7)力觉传感器能检测智能玩具自身力与外部环境力之间相互作用力,常位于有着娃娃外形的智能玩具关节处,通过检测弹性体变形来间接测量所受力。目前,六维力觉传感器可实现全力信息的测量,因其主要安装于腕关节处亦被称为腕力觉传感器。
(8)速度与加速度传感器。速度有两种,平移速度和旋转运动速度。但大多数情况下只能测旋转速度。加速度传感器一般由质量块、阻尼器、弹性元件、敏感元件和适调电路等部分组成,能够测量加速度,常见的加速度传感器包括电容式、电感式、应变式、压阻式、压电式等。智能玩具能够和人一样灵敏离不开这8种传感器。
经过传感器,信息进入到智能控制器。智能控制器由六部分组成:智能信息处理识别、数据库、智能规划智能决策、认知学习、控制知识库以及智能推理[3]。其仿效人的信息处理过程,传感器感知外界信息并将可能影响系统控制的因素输入到控制器,智能控制器对这些信息进行分析、评价、处理并进行规划决策,同时将信息存储进数据库和知识库以便为认知学习提供素材。通过智能决策将指令发送给执行器,执行器接收指令并对智能玩具输出设备施加控制。最后通过智能玩具的输出设备进行信息表达,将智能玩具处理的电信号转化成儿童易于感知的图像、物理运动、声音等等传递给儿童。与此同时,输出设备的内部状态信息传回智能玩具的传感器,形成儿童与智能玩具的交互系统。
4 结束语
儿童的认知与运动能力随着年龄的发展不断增长,在每个年龄阶段各有特点,智能玩具在设计时应当充分考虑不同年龄阶段儿童的认知能力与运动能力,并且要考虑儿童的个体差异性,使智能玩具能真正发挥其促进儿童认知、创造与审美能力的作用,将寓教于乐落在实处。
[1]王会,邓嵘.3岁-4岁儿童智能玩具体验设计研究[J].中国包装工业,2015(Z1).
[2]顾振宇.交互设计原理与方法[M].清华大学出版社,2016.
[3]李士勇,李研.智能控制[M].清华大学出版社,2016.
[4]金振宇.人机交互:用户体验与创新的原理[M].清华大学出版社,2014.
[5]罗仕鉴,朱上上.用户体验与产品创新体验[M].北京:机械工业出版社,2010.
[6]宫晓东,边鹏.交互设计[M].合肥工业大学出版社,2016.
[7]丁玉兰.人机工程学[M].北京理工大学出版社,2011.
[8]梁宁建.当代认知心理学[M].上海教育出版社,2014.
[9]李四达.交互设计概论[M].清华大学出版社,2009.
