基于视觉的工业机器人示教编程研究
2018-03-02倪晓清
倪晓清
(无锡机电高等职业技术学校机电工程系,江苏 无锡 214028)
工业机器人常用的编程方式有示教编程和离线编程两种。示教编程比较直观,但是仅能实现直线、圆弧等简单轨迹的编程,示教复杂轨迹操作繁琐且很难保证高的精度。离线编程不需要在线对机器人进行操作,但是需要采集整个工作场景的全部数据信息。在实际生产过程中,示教编程和离线编程都需要花费大量的时间和精力去调试和验证,极大地限制了生产效率。
为解决工业机器人在使用过程中的局限性,本文提出一种基于视觉的示教编程方式,利用CCD摄像头采集图像,运用数字图像处理方法获取机器人操作过程所需要知道的目标对象的数据信息,然后利用这些数据自动生成示教程序。这种编程方式对操作者的理论素养并没有很高的要求,只需利用示教工具对机器人进行引导,这将极大地降低机器人操作的门槛以及其运行维护成本。
1 视觉引导
首先建立视觉空间与机器人空间的坐标对应关系,在此基础上通过视觉传感器实现对示教工具的识别和跟踪,从而实现示教工具对机器人的引导。
1.1 视觉标定
标定过程就是确定摄像机的几何和光学参数,摄像机相对于世界坐标系的方位。
本文采用加州理工学院 Bouguet 博士提供的Camera Calibration Toolbox for Matlab 摄像机标定工具,其中主要标定方法也是采用张正友平面标定法。
1.2 数字图像处理
本文以ABB IRB 120机器人为实验平台,安装SONY EVI-D100P摄像头,利用Visual C++ 6.0及OpenCV 1.0作为编程软件,调用OpenCV相关功能指令,以实现采集图像显示到屏幕、保存及释放内存等应用功能。
(1)光线补偿。图像的色彩信息受环境因素的影响,导致色彩向某一方向移动,出现我们常见的偏冷、照片偏黄等现象。为抵消图像中出现的色彩偏差,本文采用GrayWorld色彩均衡算法进行光线补偿。
(2)边缘检测。边缘检测中常用的算子有Sobel算子、Isotropic Sobel算子、Roberts算子、拉普拉斯算子、Prewitt算子等。其中Sobel算法引入了类似局部平均的运算,因此对噪声具有平滑作用,能很好的消除噪声的影响,对于象素的位置的影响做了加权,与Prewitt算子、Roberts算子相比效果更好,故本文采用Sobel算子实现。边缘检测后的图像如图1所示。
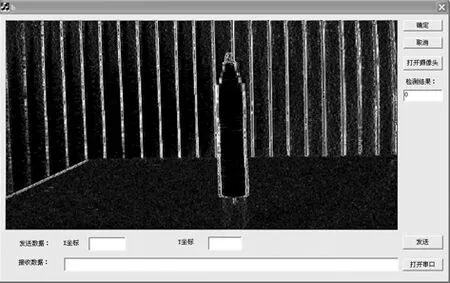
图1 边缘检测后的图像
(3)颜色建模及目标识别。采集到的原始图像一般是RGB24位位图,RGB颜色空间值受环境光线亮度变化的影响很大,很难确定目标对象的颜色空间分量的阈值信息,会加大颜色建模难度。实验研究发现,YCrCb颜色空间中的Cr和Cb分量值受光线亮度变化影响较小,可以通过确定Cr和Cb颜色分量的上下阈值范围来对目标进行颜色建模。
实际环境目标颜色可能不是单一的,为了简化操作可以对目标进行一种颜色建模来确定目标的局部特征(如图2中的笔尖),再利用边缘轮廓特征检测出示教工具(笔尖中心),然后据此得到其在所处平面的坐标数据,如图3所示。

图2 颜色建模

图3 目标识别
2 示教程序自动生成
在线示教过程一般是利用示教器控制机器人运动到指定位置,插入相应的运动指令,然后再运动到下一示教位置,再插入指令,以此类推,直到示教编程结束,再运行之前生成的程序即可重复之前的示教路径。根据这一思路,在示教点已知的情况下,只要示教点足够稠密,就可以将示教曲线全部默认为直线,采用逐点直线插值的方法即可实现自动生成示教程序。需要注意的是,在示教过程中示教者应尽量贴着纸面匀速移动示教工具。
3 试验验证
本文以ABB公司的IRB 120机器人作为示教编程的研究对象,实验过程中,机器人在示教工具的引导下完成对平面曲线的追踪。将两张A4纸平铺,示教工具在一张纸上进行示教(见图4),机器人记录示教运动轨迹自动生成示教程序,机器人执行程序后会在另一张A4纸上留下相同的轨迹(如图5)。
4 结语

图4 示教工具示教

图5 机器人执行示教程序
基于视觉的示教编程方法,综合了当前工业机器人常用的示教编程和离线编程的优缺点,可以大大提高编程效率,但是实验环境中其他物体的干扰,使得整个系统的精度受到影响。为减小误差,后续研究过程中将考虑采用多种传感器以减少系统对光线及颜色的依赖。
(本文为无锡机电高等职业技术学校校级课题《基于视觉的运动目标跟踪研究》阶段成果,课题编号:锡机电研2017-JD01,课题主持人倪晓清。)
[1]林睿.基于图像特征点的移动机器人立体视觉SLAM研究[D].哈尔滨工业大学博士学位论文,2011.
[2]D.Nister,H.Stewenius,E.Grossmann.Non-parametric selfcalibration.Proceedings of IEEE International conference on Computer Vision. 2005, (1):120-127.
[3]庄严,徐晓东,王伟.移动机器人几何—拓扑混合地图的构建及自定位研究[J]. 控制与决策. 2005,20(7):815-818.
[4]姚峰林,詹海英, 李元宗.机器视觉中的边缘检测技术研究[J].机械工程与自动化,2005,(01).
[5]倪晓清.基于视觉与激光的移动机器人环境识别研究[D].苏州大学硕士论文,2013.