中间设站三角高程法跨河水准测量在城市轨道交通工程中的应用
2018-03-02
(中铁工程设计咨询集团有限公司,北京 100055)
1 概述
南方某市轨道交通多条在建线路均下穿城区内一条较大河流。为保证盾构隧道等工程的贯通精度满足规范要求,根据《城市轨道交通工程测量规范》,轨道交通一等水准测量精度不应低于国家二等水准要求[1]。在开展地面高程控制测量时,若采用常规水准测量方法,需绕行离线位较远的桥梁、河底隧道,由此将带来更大的误差累积和工作量的显著增加。
相较于光学测微法、倾斜螺旋法、经纬仪倾角法等传统的跨河水准测量方法[2],三角高程跨河法具有适应性强、快速简便等优点。已有不少文献对其进行研究,并得出了一些结论[3-10]。根据工程的实际情况,开展利用高精度自动化全站仪实施中间设站三角高程法跨河水准测量的应用研究。
2 原理及误差源分析
三角高程测量的高差计算公式[11]
(1)
采用中间设站三角高程法进行跨河水准测量时,全站仪架设在一侧岸边,对两岸的两个目标点进行观测,构成如图1所示的四边形或等腰梯形[2]。

图1 中间设站三角高程测量示意
图1中,I1、I2为设站点,b1、b2为观测目标的棱镜安置和立尺点。根据三角高程单向观测的高差计算公式可知,I1与b1、b2的高差分别为
(2)

(3)
观测同岸目标点时,两个短边边长一般近似等长,均控制在10 m左右,经过估算,其球气差对高差的影响小于0.01 mm,可忽略不计。因此,在中间测站I1上观测得到b1与b2的高差为
h1=hI1b2-hI1b1=SI1b2·sinαI1b2-SI1b1·

(4)
同理,得到在对岸的中间测站I2上观测的b1与b2的高差为
h2=hI2b2-hI2b1=SI2b2·sinαI2b2-SI2b1·

(5)
由公式(4)、公式(5)可知,采用中间设站三角高程法所测高差主要由距离、垂直角、目标高和大气折光系数这几个参数决定,其误差也来源于此。因此,若想要提高测量结果的精度,就必须从这几方面入手。
2.1 距离和垂直角
应尽可能地采用高精度的全站仪进行多测回观测。目前的Leica TS30等高精度全站仪有棱镜模式下的距离测量精度可达(0.6+1×10-6D) mm,测角精度可达0.5″,且具有自动目标照准等功能,大大降低了测量人员的照准误差,可确保距离和垂直角观测的数据质量[3]。同时,应确保观测时将实时的温度、气压、湿度等气象参数准确输入全站仪,以完成测距自动改正。
2.2 目标高
量取目标棱镜高时,若采用加工精度高的定长连接杆,可将量高误差控制在0.4 mm以内(特别是当v1、v2采用经过检测的同一规格高精度棱镜和连接杆时,可认为v1=v2,则(4)、(5)中v1-v2项可消去)。
2.3 大气垂直折光系数K
跨河水准测量中非对称大气折光误差主要由跨河视线两端地形的不对称性、气温变化及水面上方大气气流的不稳定性等因素引起,其影响规律复杂,一直是三角高程跨河测量中的主要误差来源,其具体数值的获取是测量工作中的一大难题,至今仍未找到能通过数学模型精确求取大气折光系数的方法。但在天气状况良好、气象条件稳定的小范围近似等高区域内,一般认为折光系数K值差异较小、变动较缓,此情况下进行跨河水准的同步对向观测,可视折光系数K为同一值。
对向观测跨河点高差取均值,可得

(6)

此外,采用中间设站三角高程测量时,为增加内部检核条件,提高测量成果的可靠性,宜采用在两岸分别布设两个目标点的方案,如图2所示。其中跨河的任意两点间(如A-C、A-D、B-C、B-D)高差通过三角高程测得,同岸一侧的两点间(如A-B、C-D)高差利用电子水准仪测得,所有高差形成大地四边形的闭合环[7]。三角高程测量时,必须保证两台全站仪同步进行对向观测。

图2 四点高差组成大地四边形
3 方案实施及结果分析
3.1 工程概况
某市在建地铁3号线以地下盾构隧道形式下穿河流,下穿处河宽约330 m,河两岸盾构始发和接收井附近已按国家一等水准精度测设深桩水准点SZ1、SZ2(视为已知点)。若采用传统水准测量方法,必须绕行上游3 km处一座跨江大桥。该桥为大跨度悬索桥,车流量大,震动明显,水准测量过桥只能在深夜至凌晨车流量小时开展。为减小工作量,决定采用中间设站三角高程法进行跨河水准测量。
3.2 布点方案
经过现场勘察,选择在地铁线路下穿河流附近最窄处,南北两岸各布设两个目标点作为三角高程传递点,如图3所示,点位距河面高差约4 m。四点组成矩形,同侧点对N1与N2、S1与S2间距均约为10 m,N1与S1、N2与S2间距均约为335 m。为消除目标高量测误差的影响,采用源自高铁CPⅢ测量技术的插拔式强制对中测量组件。测量组件为不锈钢材质,由高精度数控机床加工,分别由预埋件、棱镜连接杆+精密测量棱镜、高程测量杆组成,如图4所示。
其中预埋件设于混凝土结构上,可长期保留,棱镜杆和高程测量杆为插拔式,装卸简单快捷。高程测量杆球顶与球心高差固定为10 mm。测量组件为统一规格,加工精度小于0.05 mm,安装误差小于0.4 mm[12]。
三角高程观测时,预埋件上插入棱镜连接杆+棱镜组件,作为目标点。同岸点对间及与深桩水准点间高差均采用电子水准仪往返观测,此时目标点需插入高程测量杆,再立尺测量。
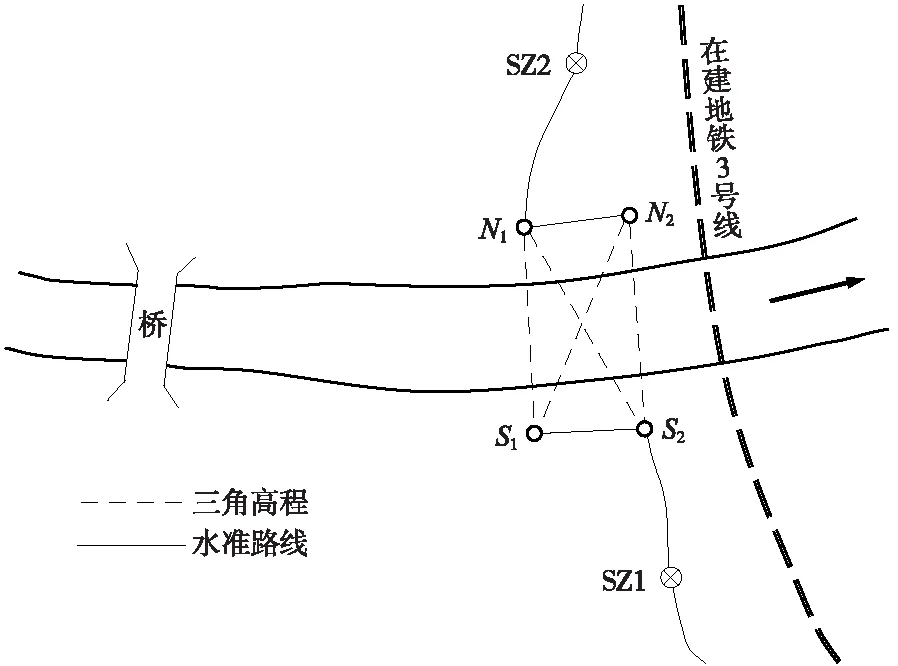
图3 跨河水准布设联测示意

图4 强制对中测量组件
3.3 仪器设备
具有自动目标照准和多测回自动测量功能的Leica TS30全站仪两台。标称精度:测角0.5″,测距(0.6+1×10-6D) mm,Leica DNA03电子水准仪(标称精度:±0.3 mm/km)一台及配套铟瓦尺、尺撑和尺垫,Leica GPR121精密圆棱镜两个,事先检测合格的棱镜连接杆、高程测量杆各两根,干湿温度计、气压计各一台,对讲机两台。
3.4 测量实施
应选择在气温变化小、微风、多云或阴天进行测量,并实时将温度、湿度和气压值输入全站仪。观测顺序如下:
①两台全站仪分别安置于N2、S2旁(以确保边长N1-N2≈S1-S2,N2-S1≈S2-N1),同步对N1、S1进行观测,分别观测6测回。
②两台全站仪分别安置于N1、S2旁,同步对N2、S1观测6测回。
③两台全站仪分别安置于N1、S1旁,同步对N2、S2观测6测回。
④两台全站仪分别安置于N2、S1旁,同步对N1、S2观测6测回。
⑤完成四对跨河点高差观测后,将两岸全站仪、棱镜连接杆+棱镜组件调岸互换,重复①~④步骤。
同岸SZ1-S2-S1、N2-N1-SZ2点间高差采用水准测量方法,对环境、时间条件要求不高,可择机实施。
3.5 数据处理分析

本处跨河水准自第一次布设测量后每半年开展一次复测,已累计开展三次复测,共获取四组观测数据,环闭合差、附合路线闭合差、每公里水准测量偶然中误差如表1所示。

表1 各次测量精度统计 mm
通过多次测量结果的验证,本方法跨河水准测量精度达到二等水准测量要求。
4 结束语
(1)跨河测量应尽可能选在河流狭窄处,两岸环境尽量相似,视线距离地表、水面应有足够的高度。跨河两岸点形成对称图形,点间高差不应过大,以避免垂直角过大导致测角误差增加[3,7]。
(2)为减小不对称大气折光带来的误差,三角高程跨河测量时应选择在成像清晰、热辐射小、气温变化较缓慢、风力较小的天气进行(最好是阴天),并避开早晚、正午光线剧烈变化的时段[4-7]。
(3)观测时应使用两台全站仪同步进行对向观测,确保观测进度基本一致。
(4)为进一步消除两台全站仪的仪器误差和测量组件不等高误差,应在完成四对跨河点对观测后,将两岸全站仪、棱镜连接杆+棱镜组件调岸互换并再次进行一组测量,高差取两组均值。水准测量时也应进行测量杆互换(前后)的两组观测。
[1] 中华人民共和国国家质量监督检验检疫总局,中华人民共和国建设部.GB 50308—2008 城市轨道交通工程测量规范[S].北京:中国建筑工业出版社,2008
[2] 中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会.GB/T 12897—2006 国家一、二等水准测量规范[S].北京:中国标准出版社,2006
[3] 范百兴,夏治国.全站仪实施跨河水准测量及其精度分析[J].测绘工程,2004,13(1):41-43
[4] 周西振,张铎强.精密跨河水准测量中大气垂直折光问题的探讨[J].地矿测绘,2004,20(1):18-20
[5] 张艳,高飞,李晓莉.应用精密三角高程测量实现跨河水准的研究[J].合肥工业大学学报(自然科学版),2007,30(10):1345-1348
[6] 周燕芳,戴阳松,李明.三角高程实施跨河水准方法探讨及精度分析[J].测绘通报,2009(9):32-35
[7] 贺春梅,明祖涛.利用三角高程代替一等跨河水准的可行性研究[J].海洋测绘,2006,26(6):25-27
[8] 张亚勇,卢金涛.二等跨河水准测量在城市轨道交通工程中的应用实例分析[J].铁道勘察,2008(3):29-34
[9] 董洪波.高精度全站仪在涟水特大桥二等跨河水准中的应用分析[J].铁道勘察,2013(2):19-21
[10] 关鹏举,郭雁军.三角高程在跨河水准测量中的分析与应用[J].洛阳理工学院学报(自然科学版),2012,22(4):32-36
[11] 潘正风,杨正尧,程效军,等.数字测图原理与方法[M].武汉:武汉大学出版社,2004
[12] 中华人民共和国铁道部.TB 10601—2009 高速铁路工程测量规范[S].北京:中国铁道出版社,2011