智能型光伏组件除尘装置设计与控制研究
2018-03-02淮安信息职业技术学院刘晓艳张楼英张守峰
淮安信息职业技术学院 ■ 刘晓艳 张楼英 张守峰
0 引言
由于气候、环境等因素的影响,长期工作在室外的光伏组件表面容易积灰,灰尘是影响光伏发电系统效率的一个重要因素。灰尘沉积会对光伏组件产生遮挡、腐蚀及热斑效应等一系列负面影响,减少系统总辐射量,降低光电转换效率,导致光伏组件的发电量减少,降低光伏发电系统的利用率[1]。据资料显示,在我国大规模安装光伏电站的地区,灰尘对组件的影响超过25%。在实际测量中,个别缺乏维护方式的电站,发电量损失高达40%。
及时清理光伏组件表面灰尘可有效提高系统发电量。中小型光伏电站一般采用人工擦拭、水枪清洗、喷淋系统等除尘方式,这些方式的清洁过程往往需要水,且需水量大、自动化程度低。对于装机容量10 MWp以上的大中型光伏电站,光伏组件单板尺寸较大、支墩较高,人工清洁难度较大,目前多采用以大型重载车辆为底盘+辊刷的方式,车辆运行时辊刷随之一起运动,擦拭组件表面的灰尘。这种方式清洗速度快,清洗效果好,但清洗时所需的大型重载车辆租用成本较高,仅适用于组件前后间距较大、地势较平坦的电站;且随着车辆的非直线运动,组件表面承受压力大小不均,需要专业的技术人员操作。也有采用依附于组件阵列的轨道式除尘方式,但组件阵列之间有落差,取电、供水、安装轨道等所需成本较高。
本文针对现有除尘方式的特点,从光伏组件表面灰尘吸附特性出发,依据轻便、高效原则,设计了一种智能型除尘装置。该装置能够在不改变组件结构及安装方式的前提下,依附在组件表面行走,运行过程中执行除尘任务。装置的运动状态、运行位置通过可编程控制器(PLC)实现智能控制。
1 灰尘吸附特性分析
在空气流动作用下,空气中存在大量的尘埃颗粒物不断迁徙和扩散,一段时间后吸附在光伏组件表面,这是灰尘沉积的主要原因。
固体表面吸附有物理吸附和化学吸附两种机制。物理吸附称为无选择性吸附,是指大气中悬浮的粒子靠近物体表面时被物体表面本身所产生的不平衡分子所吸引。化学吸附称为有选择性吸附,是指物体表面吸附具有特定化学性质的粒子的现象[2]。
物体与灰尘颗粒间的吸附力主要表现为范德华力(Valderwaals)、静电力、化学键力及毛细作用力等[3]。灰尘颗粒吸附在组件表面时可能受其中的一个力或几个力相互作用,力的大小取决于粒子与物体表面所接触面积的大小。
除了灰尘颗粒与组件表面的吸附力作用外,还需考虑颗粒的重力及颗粒之间存在的相互作用力。现假设灰尘颗粒为均匀分布的球形灰尘粒子,分析其在倾斜角度θ放置的光伏组件表面的受力模型。此球形颗粒受范德华力Fvd、支持力Fz和重力G的作用,达到平衡状态,如图1所示。

图1 灰尘颗粒在光伏组件表面受力分析
灰尘颗粒受力平衡方程为:

其中:

式中,R为灰尘颗粒半径;hϖ为Lifshitz常数;z0为颗粒与光伏组件表面平均间距。根据式(2)即可求得外加作用力,以去除沉积在组件表面的灰尘。
2 清洁装置硬件设计
2.1 系统总体方案
除尘装置硬件结构由驱动部分、控制部分及清洁部分组成,组成框图如图2所示。其中,驱动部分需要设计除尘装置的行走机构,使其能依附在组件表面,并选择合适的电动执行元件,来驱动装置本体在组件表面运动;电动执行元件的启/停控制、正反向运行及停止位置等运行状态由控制部分完成,利用PLC实现对执行元件的自动控制;除尘方式的选择采用干擦和喷淋相结合,以有效清除光伏组件表面的灰尘与固体沉积物。
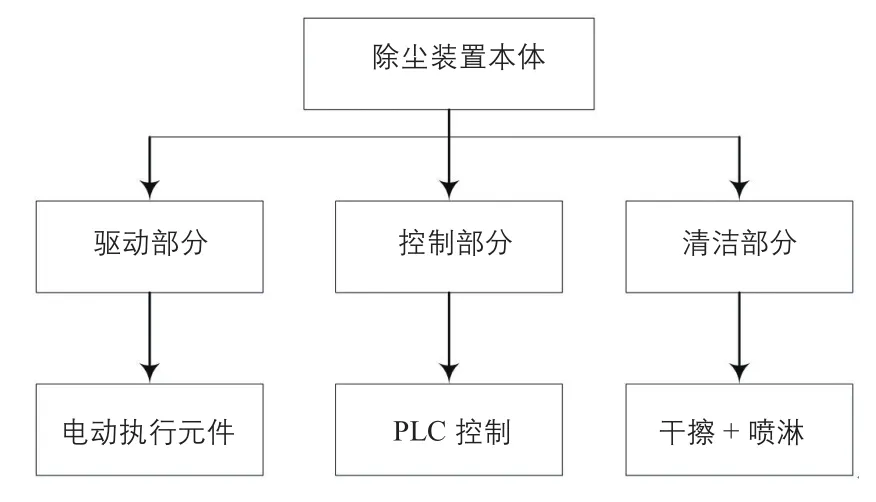
图2 除尘装置硬件结构框图
2.2 除尘方式选择
由于光伏组件表面既有浮灰,也会有鸟粪等固体沉积物,通过常规的毛刷擦拭仅可去除组件表面的浮灰,减少灰尘的遮挡,但是毛刷擦拭难以清除固体沉积物,仍不能解决热斑效应的影响。因此,需采用喷淋系统向组件表面喷水,再配合毛刷擦拭,才可去除固体沉积物[4]。
2.3 硬件结构设计
根据设计方案,装置能依附在组件表面自动行走,行走过程中在擦除组件表面灰尘的同时进行喷水,以达到清洁光伏组件表面的目的[5,6]。硬件结构示意图如图3所示。
除尘装置主体结构采用轻质铝合金支架,可降低自身重量,减小对光伏组件的压力。装置上下顶端安装固定轴承以固定除尘装置,除尘装置的硬件结构设计包括行走机构设计、传动机构设计、清洁系统设计、边界检测系统设计等。

图3 智能除尘装置结构示意图
2.3.1 行走机构设计
根据光伏组件自身的结构和安装的特殊性,设计除尘装置的宽度与光伏阵列的宽度相等,通过采用上下双排滚轮,将除尘装置卡在光伏组件上,实现在不改变组件的结构及安装方式的前提下,装置能依附在组件表面。在电动执行元件的驱动下,推动除尘装置在光伏组件边沿的滚动,实现除尘装置在组件表面的行走。
2.3.2 传动机构设计
光伏组件自动除尘装置的传动机构由同步轮、轴承轮、轴及电机4个部分组装而成。选用外径大小相同的同步轮和轴承轮,电机的转动通过1:2的同步轮以带传动的方式使除尘装置在光伏组件表面行走。
2.3.3 清洁系统设计
由于除尘方式采用干擦与喷淋相结合,在除尘装置运动方向的两侧分别安装除尘毛刷,用于擦拭组件表面的灰尘;装置上方的横杆起固定支撑作用,横杆上是直流水泵,水泵抽水通过喷头喷洒到光伏组件表面。
2.3.4 边界检测系统设计
除尘装置执行完除尘任务后需离开光伏组件表面,不能对组件造成遮挡或阴影。因此在实际安装时,每排光伏阵列的一侧都安装了支架,用于除尘装置未执行任务时的停放。要实现除尘装置准确、平稳的停到支架区域内,不超越运行极限位,需在支架上安装行程开关。
执行除尘任务时,除尘装置需在光伏组件上往复运行,为防治装置跌落,采用对射型光电开关实现边界检测。发射器和接收器相对安装在除尘装置的边界处,除尘装置运行到边界处时,遮挡住发射器和接收器间的光线传播,光电开关输出信号反向,将信息传输给控制器,控制装置反向运行,实现对光伏组件的边界检测。
3 PLC控制系统设计
除尘装置的启/停控制、往复运动的状态控制均由PLC完成,结合按钮、继电器等低压元器件构成除尘装置的PLC控制系统。
3.1 I/O地址分配
为了确保光伏组件自动除尘装置的准确安全运行,光伏组件自动除尘装置两端有2个限位开关和 1个对射式光电开关。除此之外,还要有启动按钮、停止按钮、手动/自动转换开关和指示灯等。控制系统I/O分配如表1所示。
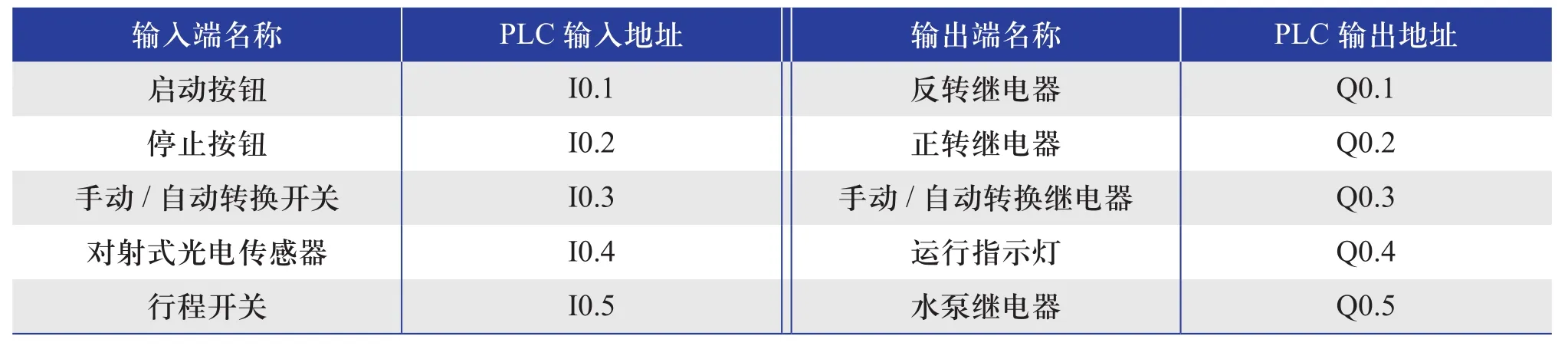
表1 I/O地址分配表
3.2 顺序功能图
根据光伏电站的除尘需求,PLC控制系统需控制除尘装置的启/停状态、实时检测边界状态及控制装置的正/反转切换,如图4所示。

图4 顺序功能图
4 除尘装置清洁试验
为验证该装置对光伏组件发电量的影响,采集1 kWp光伏阵列除尘前/后的输出电流,得到该光伏阵列的清洁效果对比曲线,如图5所示。
由图5可知,光伏组件表面灰尘及鸟粪等固体沉积物的存在,降低了组件发电量。采用除尘装置对组件表面进行清洁后,组件发电量迅速恢复到理想状态;以累计5天未清洁的情况计算,清洁后,发电量平均提升约4%。灰尘沉积导致发电效率的降低,会对大中型光伏电站造成损失,因此,需加强对光伏组件的定期维护与清洗。
5 总结

图5 1 kWp光伏阵列输出电流的清洁效果对比曲线
通过对光伏组件清洗前后的发电量对比后发现,该智能型除尘装置对累积5天未清洁的光伏组件表面进行清洁后,发电量提高4%以上有效提高发电收益;除尘装置本体无须借助附加装置,可依附在组件的竖直方向的上下边沿,通过执行电机驱动,在组件表面沿水平方向往复运行;除尘装置的运动过程由PLC控制,可自动识别边界,智能切换运行方向和除尘方式,自动化程度高;装置采用的喷淋系统耗水量小。
[1]巫江,龚恒翔,朱新才,等.光伏组件自动除尘装置设计与研究[J].重庆理工大学学报(自然科学),2014,11(3):92-97.
[2]李明.固体微颗粒粘附与清除的机理及表面保洁技术的研究[D].长沙:中南大学,2010.
[3]Bowling R A.An analysis of particle adhesion on semiconductor surfaces[J].Journal of the Electrochemical Society,1985,132(9):2208-2214.
[4]张海洪.壁面自动清洗机器人清洗工艺分析[J].机电一体化,2001,2(1):10-14.
[5]刘晓艳,龚希宾,郑荣,等.光伏组件智能除尘装置设计与研究[J].太阳能,2016,(02):29-31.
[6]王凤皋.基于新型太阳能光伏组件清洁系统的思考[J].硅谷,2012,12(2):180-181.
