船载雷达方位零位异常变化的分析与影响
2018-03-01钟德安茅永兴冯鸿奎
钟德安,包 飞,茅永兴,冯鸿奎
(中国卫星海上测控部,江苏 江阴 214431)
0 引言
雷达是航天测控网中的骨干设备,在航天测控任务中发挥着不可替代的作用[1]。而对雷达进行标校是一项必不可少的基础性技术工作。
目前,传统的雷达标校技术主要是利用标校塔进行标校,即有塔标校[2-4]。然而,由于标校塔建设周期长、费用高、地点固定,以及标校过程中多径效应明显、系统自动化程度低、时间花费较多等问题的存在[5],该技术已不能很好地适应现今的雷达标校工作。
为了减少配套标校设施建设需求,提高雷达标校的自动化程度,工程研究人员提出了许多无塔标校技术,如信标球标校[6]、恒星标校[7]、射电星标校[8]、太阳跟踪标校[9]、飞机标校[3]和卫星标校[7,10-11]等。
然而,对于船载雷达来说,由于其所处的工作环境具有动态性,所以对其进行标校时涉及的环节更多、要求更高,导致标校过程较之陆基雷达更为复杂。为了解决船载雷达标校过程中存在的一些相关问题,工程研究人员又提出了许多动态条件下的雷达标校技术。张同双等[12]在对传统的航天测量船无线电测量设备方位零位标校方法进行分析之后,提出了一种不需要大地测量的新标校方法,并对其精度进行了验证,结果表明该标校方法更加简化、更加节约成本,具有良好的应用前景。在传统坞内标校基本原理的基础上,针对测量船的摇摆特点,钟德安等[13]设计了一种新的测量船码头动态标校方法,该方法引入了船姿测量误差,进一步提高了标校精度。丰少伟等[14]利用差分GPS定位技术建立了一种通用船载雷达标校方法,并对其中涉及的数据同步和系统误差处理方法进行了讨论。杨磊等[15]在嵌入协作策略的参数估计方法基础上实现了船载外测设备等效轴系参数的标定,解决了船载外测设备状态易变性与卫星测控高精度要求的矛盾。上述方法均为船载雷达标校技术的稳步发展奠定了扎实的基础。
船载雷达方位零位是天线机械轴平行于船艏艉线且指向船艏时方位轴角编码器的读数。由于雷达机械轴是固定不变的,所以通常情况下对雷达方位零位的多次标定结果也不会出现较大差异(即不超过30″)。然而,在实际操作中,曾多次发生雷达方位零位较前次标定结果出现较大差异的问题。因此,在船载雷达标校工作中及时准确地定位造成方位零位标校差异的原因显得非常必要,否则将会给标定进度、组织计划带来较大影响,同时也将浪费大量人力、物力。
为此,本文简要介绍船载雷达方位零位标定方法,逐一分析了造成船载雷达方位零位异常变化的几种可能原因,在此基础上给出了提出问题排查的通用流程。最后,通过一个典型案例深入排查并探讨了船载雷达方位零位的异常原因。
1 雷达方位零位标定方法
为了标定雷达方位零位,首先需要进行经纬仪方位零位标定[16]、船舶坞内航向角标定[17]以及雷达方位零位标定。
1.1 经纬仪方位零位标定
经纬仪方位零位是经纬仪主镜光轴与全船方位基准平行并指向船艏时,经纬仪方位轴角编码器输出值。该值可利用搭建光路的方法使经纬仪主镜与全船方位基准建立光路联系,并使主镜光轴与其平行后得到。
1.2 船舶坞内航向角标定
船舶坞内航向角是船舶在坞内时,全船方位基准与正北方向之间的夹角,即航向角K坞,该参数只能由经纬仪标定得到。由于雷达的光轴离全船方位基准较远,难以用建立光路联系的方法与之相关联,因此只能借助经纬仪瞄方位标或利用测恒星标定的K坞做过渡,才能进一步标定方位零位,其原理如图1所示。
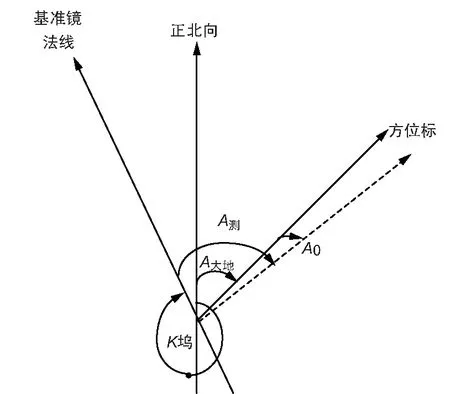
图1 达方位零位标定原理
1.3 雷达方位零位标定
由图1可知,标定时需要使用航向角K坞。首先由经纬仪标定出船舶坞内航向角K坞,然后大地测量队测量出方位标与正北的夹角(A大地),最后雷达对方位标进行测量(测量值A测),并与航向角K坞比较,即可获得方位零位A0。雷达方位零位A0与A测、A大地、K坞的关系为:
A0=A测-A大地+K坞-360°。
(1)
2 方位零位异常原因分析及排查流程
2.1 原因分析
从式(1)可以看出,雷达方位零位与雷达轴角编码器测量值A测、大地测量成果A大地及经纬仪标定的航向角K坞密切相关。因此,这3个测量值的异常是造成雷达方位零位异常原因。通过对上述3个测量值的测量过程以及部件、系统工作机制的分析,可进一步了解异常造成的原因。
2.1.1 雷达轴角编码器测量值A测
轴角编码器是重要的测角部件,其精度对雷达总精度产生直接影响,一般要求轴角编码器精度比测量设备总精度高3~10倍。用旋转变压器作为角位移传感器的编码器是雷达目前较普遍采用的轴角编码器,船载雷达初次安装使用时均对其精度进行了检测,长期使用表明可靠性较高[7]。
2.1.2 大地测量成果
随着卫星导航技术在大地测量中的广泛应用,有力提高了大地测量的效率和精度。在船载雷达参数标定中,对大地测量精度产生影响的主要因素是船舶进船坞后不均匀装载等引起的船体置平度变化,从以往经验看,该影响大都在指标范围内。
2.1.3 经纬仪标定的航向角K坞
经纬仪标定的航向角K坞是船载雷达方位零位标定的关键,没有航向角K坞就不能解算出雷达方位零位。航向角K坞与经纬仪零位及轴系误差修正参数有关,包括方位零位、俯仰零位、照准差、横轴差和竖轴差5个参数。现代光电经纬仪是非常精密的光学测量设备,具有实时测量、高精度等优点,广泛地应用于航空、航天和大地测量等领域[18]。从历史经验情况看,经纬仪零位及轴系误差稳定性相对较高。
2.2 排查流程
一旦船载雷达方位零位标定结果出现异常变化,就要进行仔细排查,以消除隐患。在排查的过程中,可利用已有资料或者历史数据建立雷达方位零位标定异常的故障树(FTA)或者利用失效模式与影响分析方法(FMEA)逐一列出可能的异常原因,并分析造成的后果。
雷达方位零位标定异常的故障树分析如图2所示。可根据该故障树,从左至右,从上到下依次排查,同时也应遵循由简到难、由浅入深的原则。
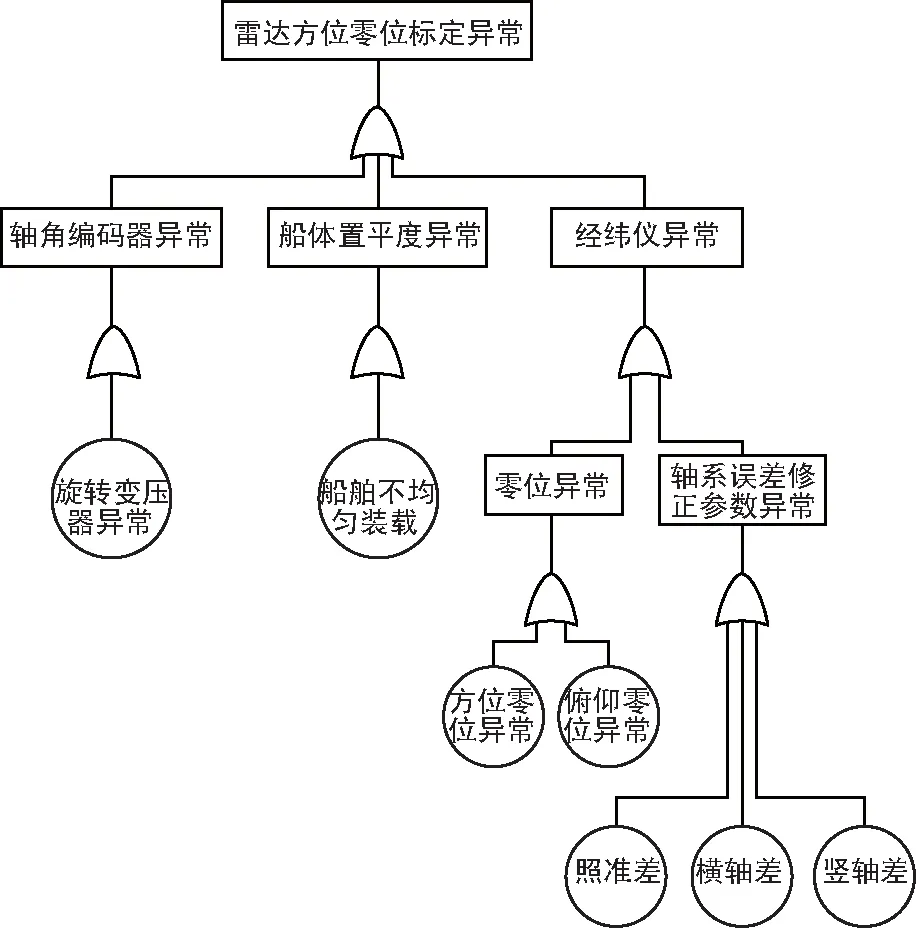
图2 雷达方位零位标定异常的故障树分析
一般的排查步骤为:
① 雷达轴角编码器精度检查
由于轴角编码器精度决定了测量数据的精度,因此首先要从雷达本身出发,对轴角编码器进行精度检查。
② 大地测量成果检查
大地测量成果是标定基准,对大地测量成果精度产生影响的主要是大地测量施测精度及船体置平度变化,可通过重新进行大地测量施测,并不间断地跟踪监视船体置平度变化情况,综合确定大地测量成果精度是否满足要求。
③ 经纬仪标定的航向角K坞检查
在排除雷达轴角编码器及大地测量因素后,需要检查经纬仪标定的航向角K坞的准确性,一般采用2种方法:
一是检查经纬仪测恒星和瞄方位标2种方法标定的航向角之间的差异(简称闭合差),通过检查闭合差,可以间接验证大地测量成果的精度,也可以检查经纬仪测恒星或测方位标的精度。
二是检查经纬仪零位和轴系误差标定的准确性。经纬仪零位和轴系误差标定需要丰富的经验和技能,实际操作中容易产生误差。零位和轴系误差的变化会引起经纬仪标定的航向角K坞产生变化。
④ 重新解算雷达方位零位
经过以上步骤后,需要重新标定航向角K坞,解算雷达方位零位,并与上次标定结果进行比较,以验证和确定排查结论。
⑤ 经纬仪主镜光轴、雷达机械轴和全船方位基准镜法线相互关系图
重新解算雷达方位零位后,可画出经纬仪主镜光轴、雷达机械轴和全船方位基准镜法线之间的相互关系图,进一步分析查找问题原因。
3 方位零位异常排查案例分析
3.1 问题描述
某次坞内标校中发现,某船载雷达方位零位相比上次标定结果相差约1角分(变大),由于2次标定期间雷达状态没有改变,方位零位不应有大的变化,该结果明显异常,随后根据上述排查流程进行了一系列分析排查。
3.2 问题排查
3.2.1 雷达轴角编码器精度检查
该雷达采用旋转变压器作为敏感元件,综观历史测量数据及其他采用同类型旋转变压器雷达的工作情况,该型旋转变压器可靠性较高。另外,从该雷达已标定的其他项目结果看,数据重复性、一致性均较好。因此认为雷达轴角编码器正常,不需再用专用检测工具对轴角编码器精度进行检测。
3.2.2 大地测量成果检查
通过对船载雷达三轴中心、方位标点位进行复测,精度满足要求。
通过检查几天来船体置平度随时间变化情况,并换算其对大地测量成果的影响,未超出指标要求。
3.2.3 经纬仪标定的航向角K坞检查
(1) 闭合差检查
本次标校中经纬仪2种方法标定的航向角一致性很好,瞄方位标航向为46°3′53″,测星航向为46°3′50″,闭合差为3″。由此说明,经纬仪测恒星或测方位标的精度高、离散度小,也从另一个角度说明大地测量成果的精度满足标定需求。
(2) 经纬仪零位和轴系误差检查
经纬仪零位和轴系误差检查结果如表1所示。从表1中可以看出,与上次标定结果相比,照准差变化约22″,方位零位变化了50″,其余误差基本未变。如上所说,经纬仪是一种十分精密的测量设备,照准差变化约22″,方位零位变化约50″属故障现象。
表1 经纬仪零位和轴系误差检查结果
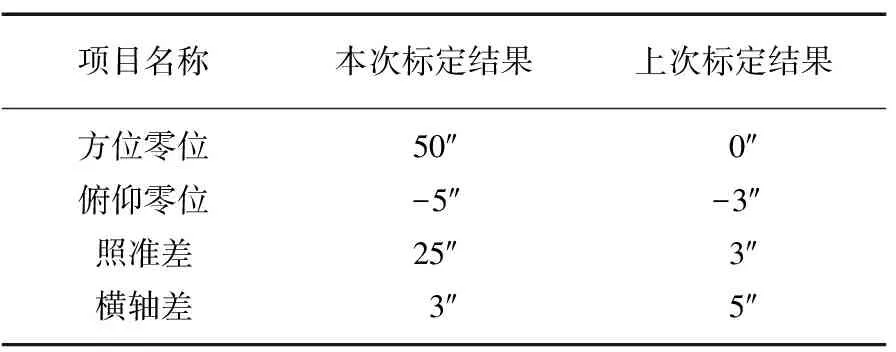
项目名称本次标定结果上次标定结果方位零位俯仰零位照准差横轴差50″-5″25″3″0″-3″3″5″
3.2.4 重新解算雷达方位零位
① 根据经纬仪零位和轴系误差检查结果重新标定船舶在坞内的航向角K坞。利用新标定的经纬仪零位和轴系误差结果重新解算得到的船舶航向角为K坞=46°5′(与先前相差约1′)。
② 重新解算雷达方位零位。以新的航向角解算的雷达方位零位-9′9″,而上次标定结果为-11′25″。
可以看出,使用最新标定的经纬仪零位和轴系误差后,得到的雷达方位零位与上次标定结果差异不仅没有减小,反而由约1′扩大到2′16″。可以认为,除了已确定的经纬仪方位零位、照准差产生变化外,还有一个误差因素尚未找到。
3.2.5 经纬仪主镜光轴、雷达机械轴和全船方位基准镜法线相互关系
将经纬仪主镜光轴、雷达机械轴和全船方位基准镜法线画于同一张图上进行分析,相互关系图如图3所示。
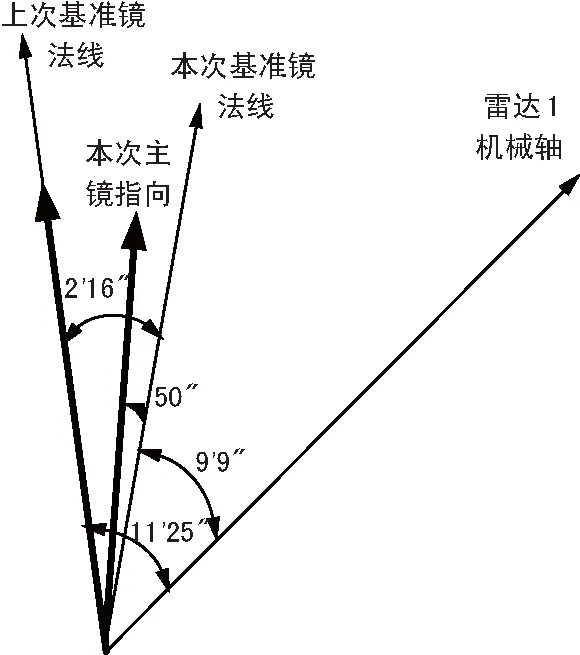
图3 机械轴、经纬仪主镜光轴、基准镜法线相互关系
从图3中可以看出,在雷达机械轴指向不变的前提下(符合实际情况),全船基准镜法线(全船方位基准)相比以往变化了2′16″,即上次标定与本次标定使用的全船方位基准不同。实际上全船只有一个方位基准,位于惯导吊筒中,这说明上次标定由于光学标定工具误差等种种原因,实际使用了一个虚拟的方位基准。而经纬仪零位变化1′26″,是由于全船方位基准和照准差变化双重原因引起的。
3.3 对测量精度的影响
从上面的分析可以看出,本例中导致雷达方位零位变化的原因2个:设备照准差发生了变化,变化达22″;2次标定没有对准同一个方位基准(其中一个实际是不存在的)。
3.3.1 照准差变化的影响
照准差是经纬仪一项误差修正参数,对方位角的影响为ΔA=c×(secE-1),其中ΔA为经纬仪方位角测量误差,c为照准差,E为目标仰角。从公式可以看出,随着仰角的增大,经纬仪方位角测量误差将增大,如当仰角为30°时,照准差变化22″引起的方位角测量误差为3.4″;当仰角为60°时,误差为22″。
3.3.2 方位基准镜不统一对精度的影响
由于方位基准只有一个,分析认为上次标校时没有对准准确的方位基准,这等同于经纬仪采用一个方位基准,而惯导采用了另一个方位基准。这将产生船体姿态测量误差。因为当经纬仪测得的航向校准惯导时,会造成水平姿态测量轴与航向测量轴不垂直。当船摇幅度为6°时,将会产生约5″的水平姿态测量误差[17]。
4 结束语
船载雷达的标定过程十分复杂,尤其是方位零位的标定涉及环节多,只有彻底摸透雷达方位零位标定差异的原因,才能更加准确地对船载雷达进行标校。本文案例中船载雷达方位零位变化仅是问题的表象,本质原因是经纬仪照准差的变化和全船方位基准前后不一致,并从不同角度对船载雷达测量精度产生影响。
由于经纬仪零位和轴系误差参数采用搭建光路的方法标定,操作复杂,易产生标定误差,因此,提高经纬仪零位和轴系误差修正参数标定精度,不仅可在一定程度上避免雷达方位零位标定异常问题的发生,而且对于提高船载雷达的整体测量精度也有重要价值。
[1] 张明友,王学刚.雷达系统[M].北京:电子工业出版社,2006.
[2] 方华金,陈国强.卫星测控系统新型校相体制的研究与实现[J].宇航计测技术,2005,25(5):9-13.
[3] 钟德安.航天测量船测控通信设备标校与校飞技术[M].北京:国防工业出版社,2009.
[4] 韦庆洲,路平,汪连栋.动态差分GPS测量进行标校塔变形监测[J].测绘科学技术学报,2010,27(2):86-87.
[5] 董建伟.利用偏馈阵子的脉冲测量雷达无塔标校方法与应用[D].哈尔滨:哈尔滨工业大学,2013.
[6] 胡兆军.基于船载合建站条件下的角度标校新方法[J].无线电工程,2009,39(12):31-33.
[7] 李武,查林.大型数字相控阵雷达标校方法探究[J].雷达与对抗,2014,34(1):6-10.
[8] 刘嘉兴.利用射电星噪声的无塔校相方法[J].电讯技术,2010,50(6):2-4.
[9] 杨兵.某型卫星地面站标校技术研究[D].南京航空航天大学,2010.
[10] HUANG Jiagui,YANG Xiao.Implement of Pulse Radar’s Calibration By Measuring Optical Tracking Satellites [J].Systems Engineering and Electronics,2007,29(10):1600-1602.
[11] 袁勇.基于精密星历的雷达测量误差标定技术研究[D].长沙:国防科学技术大学,2008.
[12] 张同双,李晓勇,钟德安,等.航天测量船无线电测量设备方位零位标校新方法[J].电讯技术,2008,48(6):30-34.
[13] 钟德安,张同双,冯鸿奎,等.测量船码头动态标校方法研究[J].飞行器测控学报,2010,29(6):20-28.
[14] 丰少伟,黄双华,杨云生.基于差分GPS技术的船载雷达通用标校方法[J].现代雷达,2012,34(5):14-16.
[15] 杨磊,刘冰,李晓勇.基于参数估计的动平台雷达等效轴系参数准实时标定方法[J].无线电工程,2016,46(7):93-97.
[16] 江文达,陈道桂.航天测量船[M].北京:国防工业出版社,2002.
[17] 钟德安.航天测量船测量设备方位取齐误差分析[J].无线电工程,2008,38(4):37-39.
[18] 王涛,唐杰.光电经纬仪视轴晃动的标定补偿[J].激光与红外,2015,45(1):63-65.