输电线路悬垂绝缘子清扫机器人行为规划
2018-03-01王洪光宋屹峰潘新安张宏志
王 林,王洪光,宋屹峰,潘新安,张宏志
(1.中国科学院沈阳自动化研究所 机器人学国家重点实验室,沈阳110016;2.中国科学院大学,北京100049;3.常熟理工学院 机械工程学院,江苏 常熟215500;4.锦州超高压局,辽宁 锦州1210001)
0 引 言
采用绝缘子清扫机器人对输电线路绝缘子带电清扫能够有效地降低电力工人的劳动强度,保障电力工人的作业安全,提高电力系统运修的自动化水平,提升电网的经济利益。输电线路悬垂绝缘子清扫机器人工作于高空、具有强电磁干扰、半结构化的架空输电线路悬垂绝缘子串上,依次对每片绝缘子进行清扫作业,且清扫作业复杂,因此,机器人必须具有足够的局部自主能力,能够进行局部环境建模、感知环境信息、进行规划决策和执行动作。此外,由于工作环境的不确定性和清扫作业的复杂性,机器人必须能够通过人机交互进行遥操作,以应对异常情况。
为了提高绝缘子清扫机器人的局部自主能力,要求机器人能够规划自身的行为。1986年,基于包容结构,Brooks[1]研制了Veteran机器人,该结构是最具影响力的基于行为的系统。之后,基于不同的体系结构,已研制了多种自主机器人[2-4],同时提出了多种行为协调机制[5,6],如基于优先级的仲裁、基于状态的仲裁[7]、基于表决机制的命令融合等。在电力巡检机器人领域,目前主要采用基于规则的专家系统[8-12]和基于离散事件理论[13,14]的行为规划方法。文献[9,10]提出了基于规则的专家系统,并使用C++和CLIPS设计了推理机,文献[9]中引入了可信度,用于解决专家系统之间的协调问题。任志斌等[11,12]基于分层规划的方式,在行为规划层采用产生式推理在线生成行为序列,结合在动作层离线生成的行为解释知识库,实现了机器人的自动越障。文献[13]提出了一种基于有限状态机的越障规划方法,采用基于模糊推理的产生式系统推理越障模式并产生动作序列。结合当前研究成果来看,电力机器人的规划方面目前没有通用规划方法。
绝缘子清扫机器人行为规划的目标是将绝缘子清扫作业和机器人的行为进行形式化的描述,以便于完成自动推理,达到机器人自主作业的目的。本文针对沈阳自动化研究所研制的悬垂绝缘子清扫机器人,在分析机器人清扫作业流程的基础上,借鉴层次结构的设计理念,将机器人的行为分为多种基本行为和3种组合行为,并利用有限状态机管理组合行为的行为序列。在此基础上,基于任务分解的思想,规划了机器人的清扫作业流程,降低了操作人员的工作强度、提高了规划效率。针对机器人在运行中可能出现的特殊情况,进行了异常处理机制的设计。最后,利用仿真和实验室实验对提出的行为规划方法进行了验证。
1 机器人系统
1.1 运行环境
本文所研究的绝缘子清扫机器人适用于500 k V超高压交流输电线路悬垂绝缘子串的带电清扫作业,图1为悬垂绝缘子串线路环境和绝缘子的主要结构参数。线路上绝缘子的瓷质双伞裙盘形绝缘子,型号为XWP2-160。
1.2 机器人系统组成
悬垂绝缘子清扫机器人机构共有6个自由度,图2为机构简图,其中自由度J1、J2、J5、J6为旋转关节,自由度J3、J4为移动关节。悬垂绝缘子清扫机器人机构由移动机构、清扫机构和机架组成。其中移动机构具有3个自由度,即J1、J2、J3。清扫机构具有3个自由度,即J4、J5、J6。

图2 悬垂绝缘子清扫机器人机械系统Fig.2 Mechanical system of insulator cleaning robot
在结构上,移动机构由具有一组夹紧机构的固定平台、具有一组夹紧机构的可移动平台和移动伸缩机构组成,机器人通过两组夹紧机构交替夹紧绝缘子和移动伸缩机构的配合运动,完成沿悬垂绝缘子串的移动。清扫机构为可移动清扫平台,主要由移动伸缩机构、圆形导轨和清扫刷组成,机器人通过移动伸缩机构、圆形导轨和清扫刷的协调运动完成对绝缘子表面的清扫。
机器人控制系统由地面基站控制系统和本体控制系统组成,两者之间通过Zigbee模块进行数据通信,利用微波进行图像传输。机器人以局部自主与遥操作相结合的方式运行。
1.3 机器人清扫作业过程
在人工辅助上串并按下启动按钮后,绝缘子清扫机器人从绝缘子串靠近铁塔端向导线端移动,每跨越一个绝缘子,机器人停下对绝缘子片进行清扫,清扫完毕后机器人继续运动,直至到达绝缘子串靠近导线端。之后,机器人自动返回至起始位置。图3为机器人清扫作业流程示意图。

图3 机器人工作流程示意图Fig.3 Schematic diagram of workflow of robot
1.4 机器人的关键位姿
为了清晰地描述机器人的作业流程,采用状态向量[15]描述机器人的关键位姿,机器人的作业可以看作机器人执行行为引起的机器人关键位姿的变化过程。表1为机器人状态向量的定义。
采用上述表示方法,机器人共有96种可能的状态。由于机器人采用蠕动式机理沿悬垂绝缘子串移动,且机器人的清扫作业具有特定的流程,因此,许多姿态在机器人工作时是不允许出现的。据此,对机器人的姿态进行分析,可以筛选出有效的姿态,如表2所示。
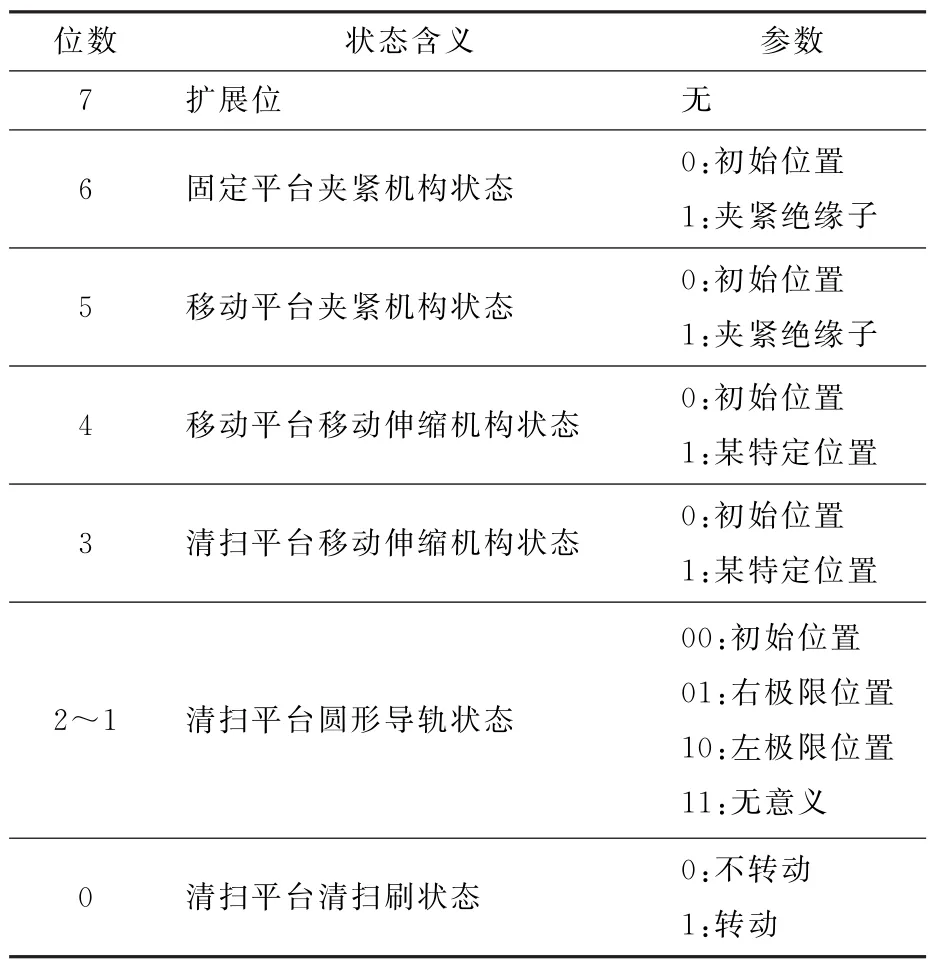
表1 机器人状态向量Table 1 State vector of robot
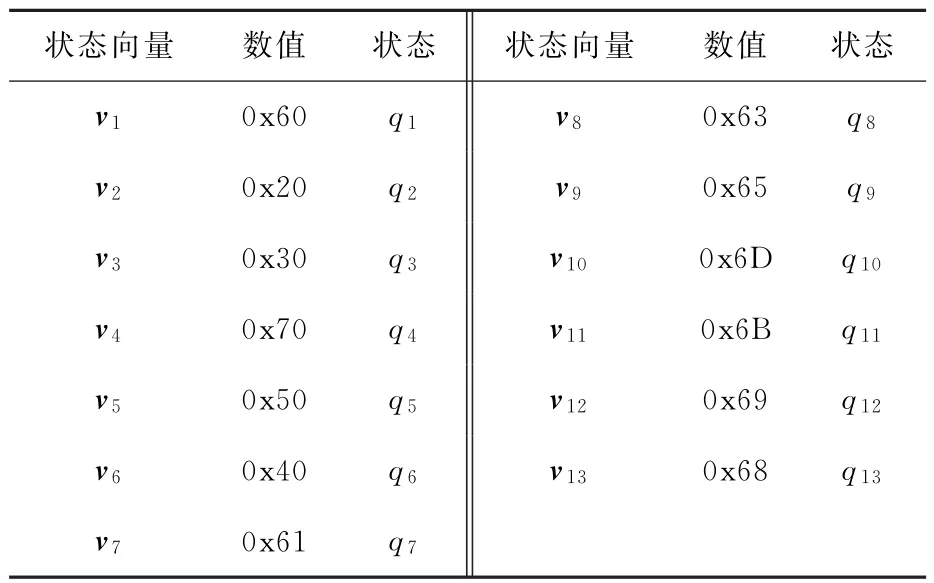
表2 机器人有效状态列表Table 2 List of valid state of robot
2 机器人清扫作业行为规划
从机器人的运动机理、线路环境特点和工作流程来看,机器人需要重复性地完成沿绝缘子串移动和清扫绝缘子动作。而且,沿绝缘子串移动、清扫绝缘子序列步骤较多且存在严格的执行顺序。因此,借鉴层次结构的设计思路,在深入分析机器人清扫作业行为的基础上,将机器人的行为分为基本行为和组合行为,并对基本行为和组合行为进行设计。
2.1 基本行为
绝缘子清扫机器人的基本行为BB(Basis behavior)定义为直接与驱动机构和传感器相连,具有特定功能的模块。在绝缘子清扫机器人的行为规划中,基本行为是机器人的基本动作,主要用于机器人重要位姿之间的迁移。机器人的基本行为可以采用端口自动机[16]形式化地表达为:

一个基本行为的表达具有5个参数,其中行为名是必选参数;()为可选参数;IPList和OPList是用〈Port Name〉:〈Port Type〉定义的输入端口列表和输出端口列表;Para List是用〈Para Name〉:〈Para Type〉定义的参数列表;Body为行为描述。
表3为绝缘子清扫机器人的基本行为,机器人主要具有9种基本行为。部分基本行为具有参数,如图4所示的如用于控制固定平台夹紧机构夹紧绝缘子的BB_UG_Clamp行为。机器人利用电流传感器检测电机的电流Ir作为输入端口参数,进行电流伺服,内部参数为伺服电流I,当电机电流达到I且保持一段时间时,认为夹紧机构已夹紧绝缘子。此外,该行为具有超时参数timeout,如果该行为的执行时间超过timeout,表示系统可能出现异常情况(如传感器故障、机构异常),需要人工干预。

表3 基本行为列表Table 3 List of basis behavior
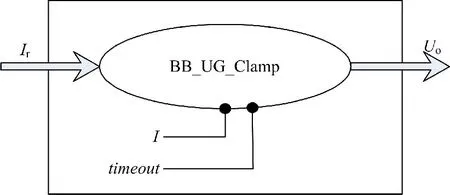
图4 基本行为BB_UG_Clamp示意图Fig.4 Sketch diagram of BB_UG_Clamp
2.2 组合行为
机器人的组合行为[17](Combinational behavior)是由若干个基本行为和一个行为推理器组成的,能够实现特定功能的行为。行为推理器根据机器人的传感器信息和机器人的所处的状态,确定基本行为的激活和执行。在绝缘子清扫机器人行为规划中,行为推理器用于协调各个基本行为的执行顺序。组合行为可以利用集合进行定义:

式中:BB i(i=1,2,…,n)表示基本行为;M表示行为推理器。
分析绝缘子清扫机器人的清扫作业任务可知,绝缘子清扫机器人具有3种组合行为,即沿绝缘子串向下移动一个绝缘子距离的行为CB1、清扫绝缘子的行为CB2和沿绝缘子串向上移动一个绝缘子距离的行为CB3。
绝缘子清扫机器人的组合行为可以采用有限状态机[18]表达,该方法可以方便地调整序列和形象地描述行为设计的过程,能够作为组合行为的推理机制。机器人根据内外部传感器的信息,结合当前的状态进行状态的迁移。有限状态机M可以形式化地表达为:

式中:Q为非空的有限状态集合,q i∈Q为某一状态,q0∈Q为初始状态;Σ为有穷的输入事件集合,σi∈Σ为M的某个输入事件;δ为状态转移函数,转移函数的定义为δ:Q×Σ→Q,如δ(q i,σ)=q j表示在q i状态时发生σ事件,系统状态从q i转移到q j;F为M的终止状态集合,F⊆Q。
对于CB1组合行为,由机器人的工作原理可知,Q={q1,q2,q3,q4,q5,q6},初始状态为q1,F={q1}。根据机器人的运动机理和环境特点,CB1组合行为由6个基本行为组成,基本行为在特定状态下执行,触发事件后,机器人进行状态的迁移。图5为CB1组合行为的有限状态机模型。
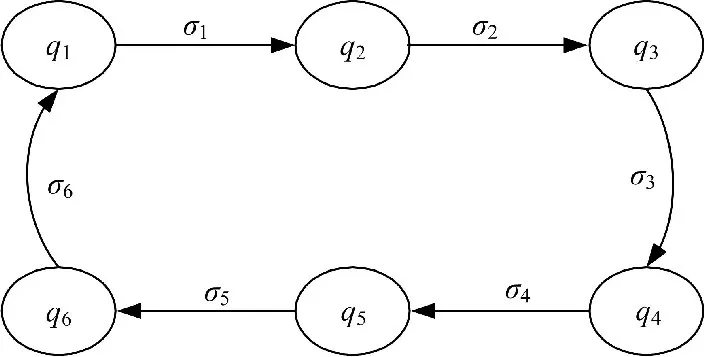
图5 CB1组合行为的FSMFig.5 FSM of combination behavior CB1
表4为CB1的事件列表。当机器人处于q1状态时,若发生σ1事件,则机器人向q2状态迁移。
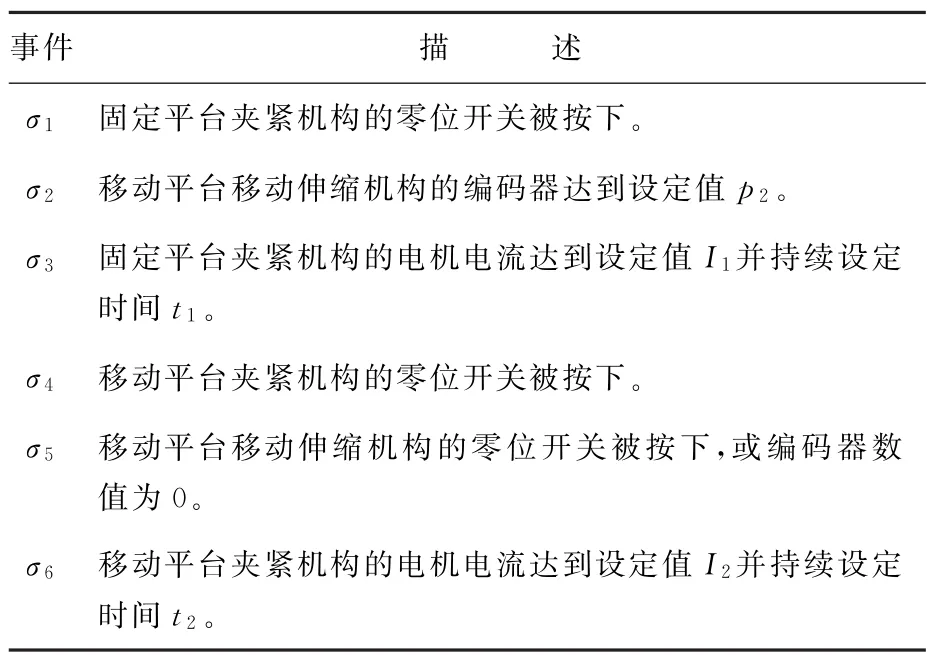
表4 CB1组合行为事件列表Table 4 List of events of CB1
由于待清扫绝缘子具有两个瓷裙,机器人清扫绝缘子时需分别清扫两个瓷裙。对于组合行为CB2,可以使用图6所示的有限状态机表示,其中,Q={q1,q7,q8,q9,q10,q11,q12,q13},初始状态为q1,F={q1}。
表5为CB2的事件列表。机器人根据当前的状态和发生的事件执行基本行为并发生状态的迁移。
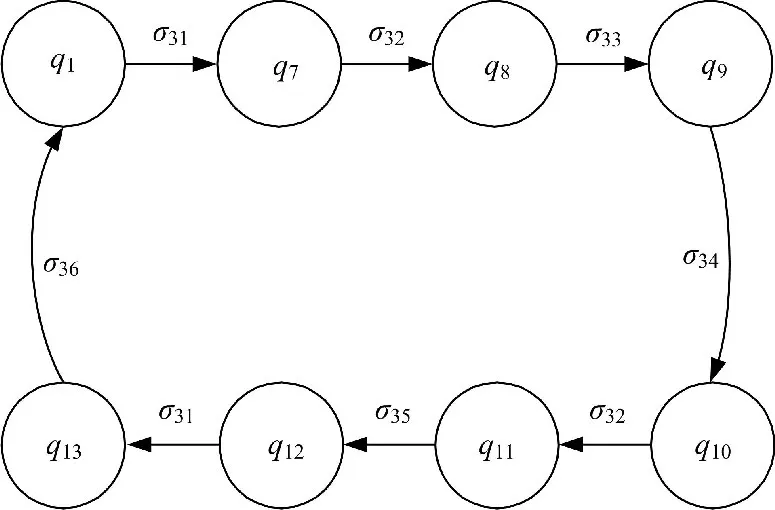
图6 CB2组合行为的FSMFig.6 FSM of combination behavior CB2
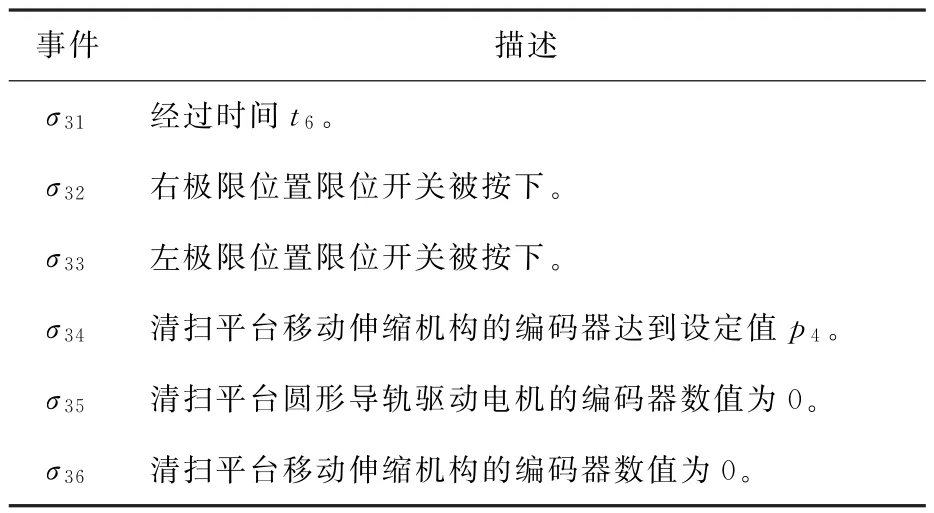
表5 CB2组合行为事件列表Table 5 List of events of CB2
组合行为CB3与CB1类似,可以用图7所示的有限状态机进行表示。有限状态机中的事件列表与表4相同。
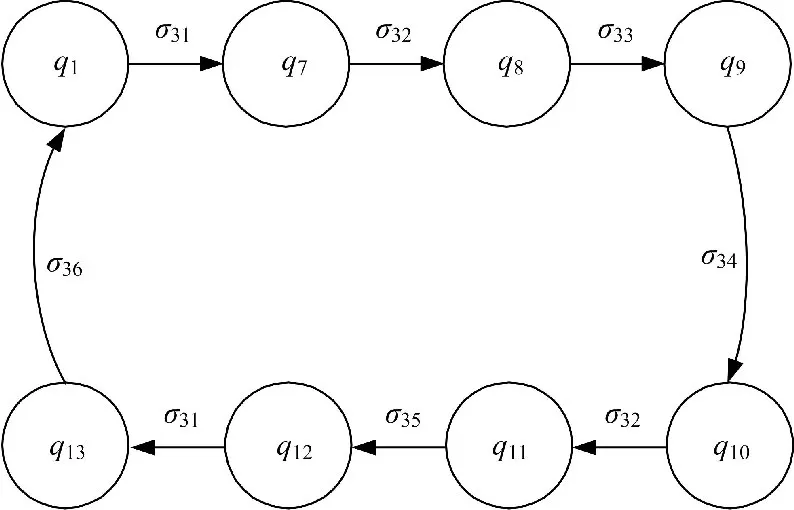
图7 CB3组合行为的FSMFig.7 FSM of combination behavior CB3
2.3 清扫任务描述与分解
由前文所述的绝缘子清扫机器人的工作流程可知,清扫作业可以被分为若干个具有特定顺序的子任务,由机器人执行。采用图8所示的基于任务完成的方法对清扫作业任务进行分解,清扫任务可以分解为若干顺序执行的子任务task1、…、task k、…、task n来实现。
鉴于机器人的运行机理和清扫作业特点,这些子任务分为3种,即向下跨越一片绝缘子、清扫一片绝缘子和向上跨越一片绝缘子。这3种类型的子任务可以用组合行为来实现。当电力工人输入并确认绝缘子串的片数后,任务规划器自动对清扫任务进行分解,生成子任务序列。序列管理器对子任务进行解释,并利用组合行为完成任务。
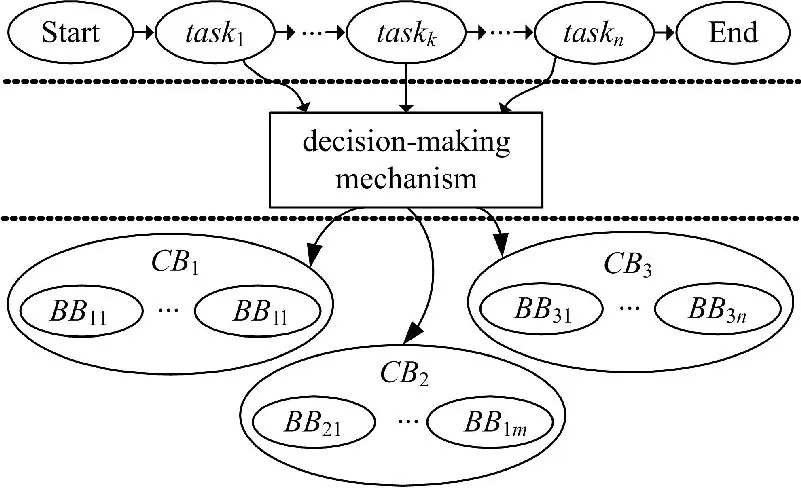
图8 清扫任务分解示意图Fig.8 Sketch diagram of decomposition of cleaning task
2.4 异常处理机制
由于绝缘子清扫机器人的工作环境复杂,运动步骤较多且存在严格的步序,此外,机器人难免会碰到一些特殊情况,如传输中断、传感器故障等,因此,需要引入异常处理机制,以保证人员安全、线路安全、设备安全和清扫任务的正常进行。
尽管本文设计的绝缘子清扫机器人具有自主运行的能力,为了保证机器人运行的可靠性,在进行清扫作业时,仍采用半自主的方式进行。机器人可自动运行,在遇到特殊情况(如基本行为执行失败)时,提醒操作人员进行人工干预。
绝缘子清扫机器人主要考虑了以下几种异常情况:①机器人本体与地面基站通讯中断。为了保证机器人运行的安全可靠性,采用地面基站发送运动指令、指令校核、机器人状态的对比校核等措施,保证机器人在通信异常情况下停止运动。若通信异常,机器人停止运动并等待一段时间,若通信仍不恢复,则返回至起始位置。②机器人基本行为执行失败。由于机器人机构的故障、传感器故障或其他原因,机器人的基本行为执行可能出现失败的情况。因此,在基本行为的设计时,引入了超时参数,确保机器人能够感知执行失败的情况。当该异常发生后,地面基站提醒操作人员进行人工干预。人工干预完毕,机器人恢复正常状态时,机器人可继续工作。③电量低。为了防止机器人因电量低导致无法运行的情况发生,机器人控制系统具有电压采集和监控功能,在电量不足时报警。④避障。机器人在进行清扫作业时,有可能与绝缘子串发生干涉,此外,错误的运动指令可能导致机器人零件之间的干涉。因此,机器人在执行基本行为时,通过环境建模和运动学校验,保证运动指令的正确性。基本行为的超时功能能够保证基本行为执行的可靠性。
此外,机器人遇到无法处理的情况时,将机器人的控制权交给操作人员,进行人工干预和处理。
3 仿真与实验
3.1 行为规划仿真
根据实际线路环境,利用Matlab的Simulink和Stateflow工具箱,建立了机器人行为规划模型,进行了机器人行为规划的仿真验证。仿真实验主要步骤如下:

图9 机器人行为规划仿真模型Fig.9 Simulation model of robot behavior planning
(1)利用Stateflow工具箱建立了机器人行为规划的有限状态机模型,主要包括3个关键状态,其中每个关键状态具有多个子状态。
(2)基于事件驱动进行清扫作业行为规划的状态迁移仿真。由外部事件和内部事件驱动,结合机器人关节的运动特性和环境特点,自动得到传感器的触发序列,进行状态的转移。
图9(a)为机器人清扫行为规划的有限状态机模型,图9(b)为组合行为CB1的模型。
图10为运行该模型得到的机器人关节运动曲线,其中I为机器人向下移动一个绝缘子的距离时的关节速度曲线、角速度曲线,II为机器人清扫绝缘子时的关节速度曲线、角速度曲线。仿真实验验证了机器人行为规划方法的正确性,采用有限状态机方法便于对清扫过程进行表达和编程。
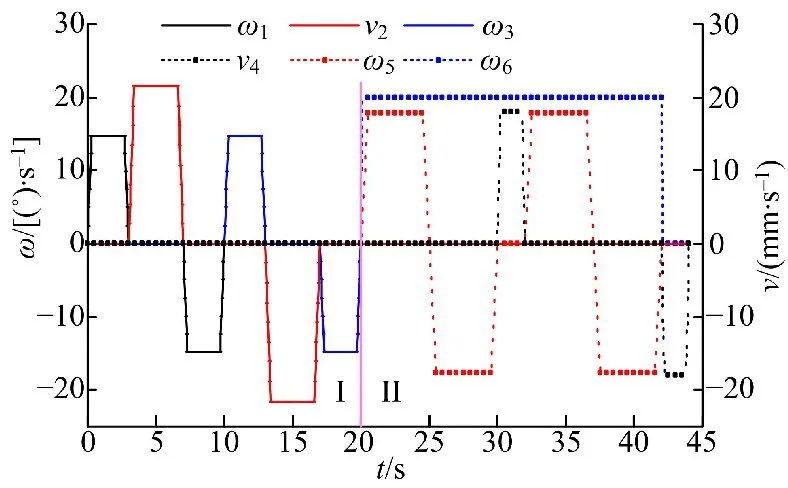
图10 机器人关节运动曲线Fig.10 Motion curves of robot joints
3.2 实验室实验
在实验室环境下进行实验,验证绝缘子清扫机器人行为规划的有效性。图11为绝缘子清扫机器人系统原理样机,机器人系统由机器人本体和地面基站组成。

图11 绝缘子清扫机器人系统原理样机Fig.11 Prototype of insulator cleaning robot system
在实验室线路上,进行了机器人沿绝缘子串的行走实验。机器人在人工辅助上串后,按照行为规划的序列,每经过6个基本行为,可沿绝缘子串向下移动一个绝缘子的距离,如图12所示。依照图12子图的顺序:①机器人处于初始状态q1;②机器人执行固定平台夹紧机构松开绝缘子的行为,零位开关被按下时,迁移至q2状态;③机器人执行移动平台移动至特定位置的行为,编码器计数达到特定值时,迁移至q3状态;④机器人执行固定平台夹紧机构夹紧绝缘子的行为,电机的电流达到设定值并持续设定时间时,迁移至q4状态;⑤机器人执行移动平台夹紧机构松开绝缘子的行为,零位开关被按下时,迁移至q5状态;⑥机器人执行移动平台移动至初始位置的行为,编码器计数为零时,迁移至q6状态;⑦机器人执行固定平台夹紧机构夹紧绝缘子的行为,电机的电流达到设定值并持续设定时间时,迁移至q1状态。至此,机器人相对于绝缘子串向下移动了一个绝缘子结构高度的距离。实验结果表明,行为规划方法正确有效,能够应用于机器人的清扫作业任务。
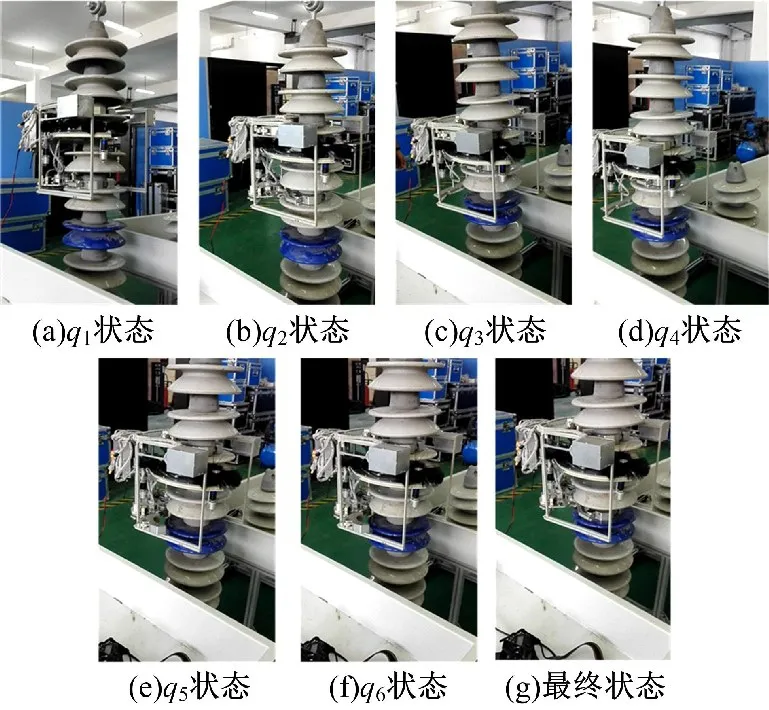
图12 机器人沿绝缘子串向下行走实验Fig.12 Downward movement experiment
4 结束语
针对悬垂绝缘子清扫机器人清扫作业半自主控制问题,本文提出了一种基于层次结构的行为规划方法,并利用有限状态机管理行为序列,提高了绝缘子清扫机器人的局部自主能力。将清扫作业任务分解为子任务序列,并利用组合行为完成子任务,提高了操作的便捷性和灵活性,易于编程。仿真实验验证了行为规划方法的正确性和有效性,实验室实验表明本文提出的行为规划方法能够应用于机器人的清扫作业。
[1]Brooks R A.A robust layered control system for a mobile robot[J].IEEE Journal of Robotics and Automation,1986,2(1):14-23.
[2]Arkin R C.Motor schema-based mobile robot navigation[J].The International Journal of Robotics Research,1989,8(4):92-112.
[3]Gat E,Desai R,Ivlev R,et al.Behavior control for robotic exploration of planetary surfaces[J].Robotics and Autonomous Systems,1994,10(4):490-503.
[4]Jones J L.Robots at the tipping point:the road to iRobot Roomba[J].IEEE Robotics and Automation Magazine,2006,13(1):76-78.
[5]Scheutz M,Andronache V.Architectural mechanisms for dynamic changes of behavior selection strategies in behavior-based systems[J].IEEE Transactions on Systems,Man,and Cybernetics,Part B(Cybernetics),2005,34(6):2377-2395.
[6]Tyrrell T.Computational mechanisms for action selection[D].Edinburgh:University of Edinburgh,1993.
[7]Arkin R C,Mac Kenzie D.Temporal coordination of perceptual algorithms for mobile robot navigation[J].IEEE Transactions on Robotics and Automation,1994,10(3):276-286.
[8]李恩,梁自泽,谭民.基于规则库的巡线机器人自主越障动作规划[J].机器人,2005,27(5):400-405.Li En,Liang Zi-ze,Tan Min.Rule base based motion planning method for inspection robot to cross obstacles autonomously[J].Robot,2005,27(5):400-405.
[9]唐栎,房立金,王洪光,等.基于分布式专家系统的超高压输电线路巡检机器人控制系统的研究[J].机器人,2004,26(3):267-271.Tang Li,Fang Li-jin,Wang Hong-guang,et al.Inspection robot control system of power transmission line based on distributed expert system[J].Robot,2004,26(3):267-271.
[10]苏伟,王吉岱,孙爱芹,等.高压输电线路巡检机器人的专家控制系统[J].计算机工程,2012,38(15):166-168.Su Wei,Wang Ji-dai,Sun Ai-qin,et al.Expert control system of inspection robot for high voltage transmission line[J].Computer Engineering,2012,38(15):166-168.
[11]任志斌,阮毅.基于知识库的输电线路巡检机器人的越障控制[J].计算机工程与应用,2008,44(3):236-239.Ren Zhi-bin,Ruan Yi.Obstacle-navigation control of inspection robot for power transmission lines based on knowledge base[J].Computer Engineering and Applications,2008,44(3):236-239.
[12]邬大为,阮毅,任志斌.基于产生式系统和轨迹优化的巡线机器人控制[J].计算机工程与设计,2008,29(11):2868-2870.Wu Da-wei,Ruan Yi,Ren Zhi-bin.Inspection robot control system of power transmission line based on production system and trajectory optimization[J].Computer Engineering and Design,2008,29(11):2868-2870.
[13]郭伟斌,王洪光,姜勇,等.一种输电线路巡检机器人越障规划方法[J].机器人,2012,34(4):505-512.Guo Wei-bin,Wang Hong-guang,Jiang Yong,et al.Obstacle navigation planning for a power transmission line inspection robot[J].Robot,2012,34(4):505-512
[14]宋屹峰,王洪光,李贞辉,等.基于视觉方法的输电线断股检测与机器人行为规划[J].机器人,2015,37(2):204-211,213.Song Yi-feng,Wang Hong-guang,Li Zhen-hui,et al.Vision based transmission line broken strand detection and robot behavior planning[J].Robot,2015,37(2):204-211,213.
[15]姜勇,王洪光,房立金.基于主动试探的微小型爬壁机器人步态控制[J].机械工程学报,2009,45(7):56-62.Jiang Yong,Wang Hong-guang,Fang Li-jin.Gait control of micro wall-climbing robot based on initiative exploration[J].Journal of Mechanical Engineering,2009,45(7):56-62.
[16]Steenstrup M,Arbib M A,Manes E G.Port automata and the algebra of concurrent processes[J].Journal of Computer and System Sciences,1983,27(1):29-50.
[17]唐鸿儒,宋爱国,章小兵.基于宏行为的侦察机器人事务执行机制研究[J].机器人,2007,29(2):97-105.Tang Hong-ru,Song Ai-guo,Zhang Xiao-bing.Mission execution mechanism of reconnaissance robot based on macro behavior[J].Robot,2007,29(2):97-105.
[18]Murphy R R.Introduction to AI Robotics[M].London:MIT Press,2000:174-183.
