基于GE PLC的机械手控制系统设计及组态
2018-02-28卫旋
卫旋


摘要
工业科技的快速发展对产品的生产速度、质量、效率等方面提出了更加严格的要求,机械手作为自动化控制产品,能够实现生产的机械化和自动化,同时也可以保护人身安全,因而,对机械手控制方面的研究具有重要意义。本文介绍了GE PLC在机械手控制系统中的应用,详细说明了使用GE配套软件进行系统的硬件配置、梯形图的编写以及组态界面设计的方法。
【关键词】可编程控制器(PLC) 机械手 梯形图 组态
1 引言
随着科学技术的日新月异,自动化程度要求越来越高,市场竞争激烈、人工成本上涨,以往人工操作的搬运和固定式输送带为主的传统物件搬运方式,己不再适应市场的要求。机械手的出现,正好解决了这一问题。它可以减轻劳动强度,保障生产的可靠性、安全性,降低生产成本,减少环境污染、提高产品的质量及经济效益。在现代生产过程中,机械手被广泛的运用于自动生产线中,机械手的研制和生产已成为高新技术领域内,迅速发展起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此机械手己收到许多部门的重视,并越来越广泛地得到了应用。
本文介绍的以GE PLC为控制核心的机械手,能够模仿人手动作,并按设定程序、轨迹和要求代替人手抓(吸)取、搬运工件。结合其配套的软件,可完成对PLC控制器硬件的配置、梯形图的编写以及使用组态软件完成监视控制系统模型的建立,从而可实现人机交互,实现远程对机械手的监视与控制。
2 机械手的结构及工作原理
2.1 结构图
机械手的结构图如图1所示。
2.2 工作原理
该机械手主要用作搬运工件,要求其按照指定轨迹进行工件搬运。因此,要求该机械手具有四个运动:手指的开合,手臂的伸长回缩,手臂的上升下降,手臂在水平面内的回转。进行工作时,机械手伸出、下降到工件位置并抓起,然后上升并缩回手爪,转动180°后手爪伸出并下降到工件位置并放开,将工件搬运到另一处。
3 GE PLC的配置及软件设计
GE Fanuce系列PLC是一种模块化的结构,包括CPU模块、I/O模块、内存模块、电源模块、底板或机架,这些模块可以按照功能需求按照一定规则组合配置。如图2所示。
GE相关的编程软件是Prolicy MachineEdition(简称PME或ME)。PME是一个适用于逻辑程序编写、人机界面开发、运动控制及控制应用的通用开发环境。可用来组态PAC控制器、远程I/O站、运动控制器以及人机界面等,可以创建PLC控制程序、运动控制程序和触摸屏操作界面等,可以在线修改相关运行程序和操作界面,还可以上传和下载工程(包含组态和程序),监视和调试控制程序。
使用PME编程的具体步骤如下:
(1)创建项目工程:启动软件,可建立一个新的工程项目。项目名称可自定义,注意要选用相应的控制器类型;
(2)填写IP地址、硬件配置:要想使运行PME软件的电脑与底层PLC进行通信,就要进行IP地址的配置,具体操作为:右击工程名下方的target,点击属性,将IPAddress设置成正确的地址。此后,将用到的各个模块依次进行相应槽位的配置;
(3)编写梯形图:编写程序前,要根据机械手的功能及动作过程,先画出其程序流程图,并对各个变量进行Fo地址的分配,最后编写梯形图。机械手的输入量包括启动、停止、伸出、缩回、上升、下降等;输出量包括指示灯、报警等等。
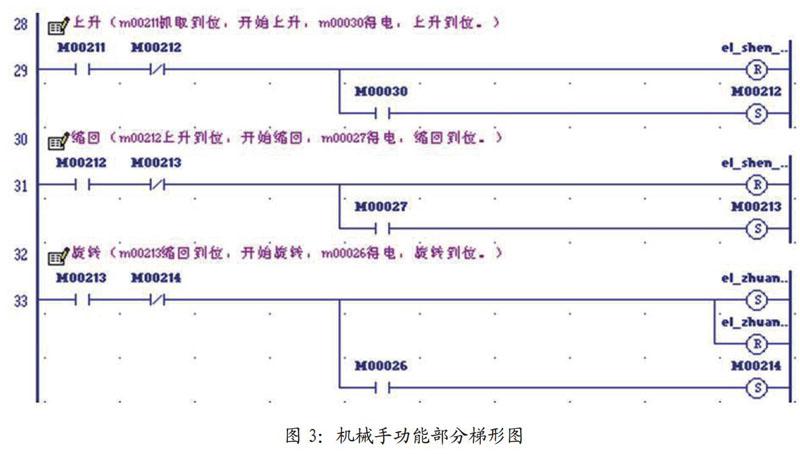
按照输入输出分配单元,依据具体的工艺流程,结合所学PLC梯形图的基本知识、绘制原则及常用指令,编写出可实现机械手搬运工件的梯形图控制程序。使用GE提供的人机界面GE PME可以方便的写出实现该功能的梯形图,部分如图3所示。
4 监控界面的设计
组态软件又称组态监控软件系统软件,它是指一些数据采集与过程控制的软件,处在自动控制系统监控层一级的软件平台和开发环境,使用灵活的组态方式为用户提供快速构建工业自动控制系统监控功能的通用层次的软件工具。iFIX是GE设备专用的一套工业自动化软件,它为用户提供一个過程化的窗口,提供实时数据给操作员以及软件应用。一台运行iFIX软件的计算机称为一个节点,一个从过程硬件获取数据的节点称为SCADA服务器。节点之间通过I/O驱动软件和过程硬件进行通信,建立并维护过程数据库,具有数据采集和网络管理功能。
使用iFIX实现工程应用的一般过程包括如下几个步骤:
(1)I/O驱动器配置;
(2)数据库构造;
(3)组态画面建立;
(4)动画连接建立;
(5)运行与调试。
经过上述步骤,结合机械手的具体动作过程及PME软件中相关输入输出变量进行关联,即可得到如图4所示的组态监控界面。建立组态界面后,我们可以远程监测机械手的动作情况,同时还可以远程发出控制命令。
5 结论
生产中应用机械手可以提高生产的自动化水平和劳动生产率;可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。并且采用PLC控制使接线简单,安装方便,而且保证运行的可靠性,减少维修量,进一步的提高了工作效率。采用GE相关组态软件,还可做到远程实时监测与控制机械手的动作,具有较好的应用价值和发展前景。
参考文献
[1]江秀汉,汤楠.可编程序控制器原理及应用(第二版)[M].西安:西安电子科技大学出版社,2011.
[2]王新,张庆良.基于PLC控制的气动机械手[J].机械管理开发,2013,2,111-112.
[3]袁森,肖军,罗卫东.基于PLC的机械手控制系统设计[J].煤矿机械,2009,30(05):198-200.
