基于物联网的沿街牌匾监测系统移动报警判断算法优化
2018-02-28刘清松
刘清松,刘 扬
(北京建筑大学 智慧城市研究所,北京102616)
0 引言
面对广告繁多且更新变化快的问题,沿街牌匾监测系统给监管人员提供一个实时监测牌匾的集管理、监测、预警为一体的平台,从而渐渐替代了组织人员定期巡查、耗时耗力且效率低下的现状。因此,对于牌匾移动情况实时准确监测变得更加迫切,但由于RFID射频系统自身存在的问题以及外界自然环境影响[1],往往会导致大量的牌匾拆卸而发生移动的错误报警,严重影响执法和巡检人员的判断。如果不能大幅度地提高移动报警的精确度,不仅不能改变人员定期巡查的情况,反而会增加巡检人员的任务量,因而解决好移动报警误报的问题便成了沿街牌匾监测系统能否真正运行的关键。而提高精度的关键在于判断机制的优化,优化前的判断机制为主要依靠数据入库服务进行判断,其原理是对30 min内数据进行逐行读取,解析三轴加速度X、Y、Z值,并对同一标签相邻时间点的X、Y、Z值进行比较以180为判断值,抛出最终异常值。该机制无法排除外界和自身噪声误差的影响,导致报错情况严重。优化后的判断机制:在单纯的入库服务后根据真实的误报数据添加了相应的消除部分误差的判断算法,已达到优化的目的。
1 沿街牌匾监测系统基本组成
沿街牌匾监测系统是一个实时监测牌匾的集管理、监测、预警为一体的平台。其基本组成主要分为硬件和软件两大部分。硬件部分有基站和RFID标签以及后台服务器组成。软件部分由沿街牌匾监测系统、RFID数据接收服务、数据入库服务等组成。沿街牌匾监测系统通过 GPRS 无线网络的传输来接收数据[2-3],具体的工作原理是标识卡进入磁场后,接收解读器发出的频射信号,凭借感应电流所获得的能量发送出存储在芯片中的产品信息,或者主动发送某一频率的信号(Active Tag有源标签或主动标签),解读器读取信息并解码后,送至基站进行有关数据的处理,基站运用 SIM卡,通过 GPRS 将解析的数据发送到服务器,由RFID数据接收服务进行接收,随后数据入库服务实时将解析数据存入数据库,如图1所示。
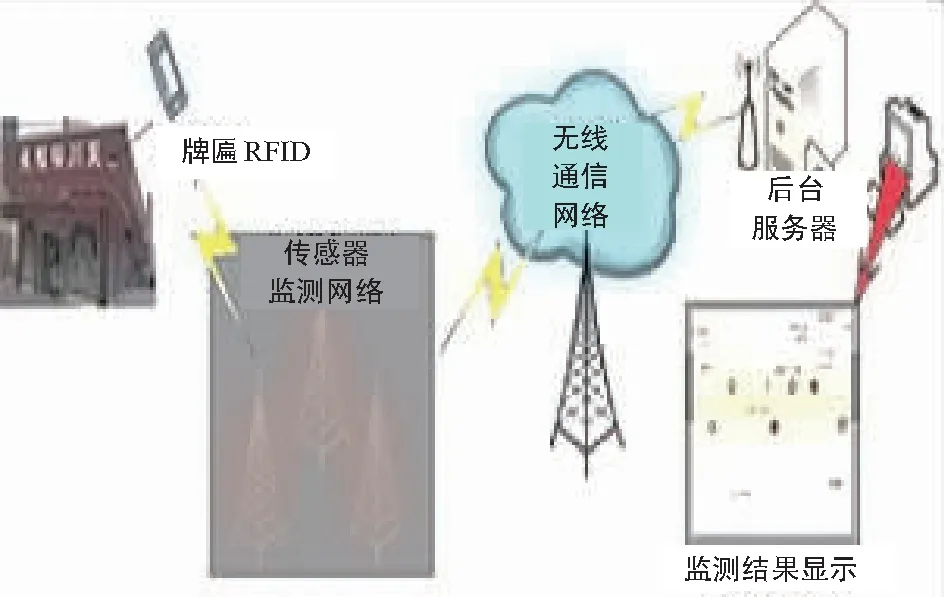
图1 基于射频识别的广告牌匾监测流程示意图
2 沿街牌匾监测系统移动报警误报分析
2.1 标签内加速度传感器本身系统因素
① 系统低频响应差
这有两方面的原因:加速度传感器低频响应的截止频率不够低,与传感器配套使用的恒流电压源或电荷放大器的截止频率不够低。
② 系统低频信噪比差
出现这个情况大多是由于加速度传感器的低频噪声大,这就需要选用满足低频信噪比指标的传感器。
2.2 RFID的信号碰撞问题
RFID系统与其他射频系统一样,基站在识别标签过程中存在碰撞的问题,严重时会影响基站的标签识别与通信。尽管已通过各种媒体访问协议来防止不同类型的碰撞,使其识别和通信的错误率降低;但是随着时间的积累其错误率也会有所增加,极端情况下会暂时无法识别标签,导致漏掉报警信息,从而对预警造成了一定影响[4]。
① 多标签与单阅读器的碰撞
此类碰撞主要发生在一个阅读器的识别区内,一个以上的标签同时发出使用阅读器的请求时。多标签与阅读器间的碰撞极大,尤其是在使用被动标签的环境中。
② 多阅读器与单标签的碰撞
此类碰撞主要发生在单个标签被多个阅读器识别的情况下。这种情况下,多个阅读器试图独占单个标签,将会导致标签间隔状况出错,甚至不会被识别[5-6]。
③ 阅读器与阅读器间的碰撞
此类碰撞是由传统的频率干扰引起的,具有相互干扰区域的多个阅读器会被同一频率锁定[7]。
2.3 标签受潮(下雨)情况下误报
这种情况发生在雨天,主要出现在个别密封状况不是很到位的标签上,证明了标签受潮会导致出现误报,如表1和表2所示。
表1 2017.6.13中雨

牌匾名称数据丢失状态移动报警次数撕毁报警次数预警时间炫世界电玩城正常3正常2017/06/12~2017/06/13
表2 2017.6.23大雨
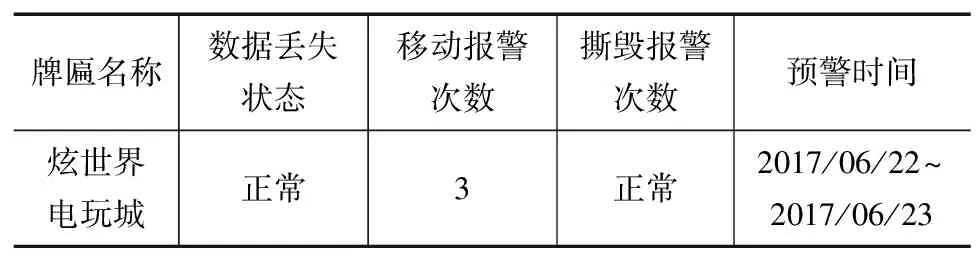
牌匾名称数据丢失状态移动报警次数撕毁报警次数预警时间炫世界电玩城正常3正常2017/06/22~2017/06/23
3 关于移动报警真实数据的分析
3.1 移动报警的判断机制
目前沿街牌匾系统的移动报警是由数据入库服务进行判断的,其原理是对30 min内数据进行逐行读取,解析三轴加速度X、Y、Z值,并对同一标签相邻时间点的X、Y、Z值进行比较,以180为判断值,抛出最终异常值。这种经过一次判断的异常值可能包含着硬件本身的误报,环境对标签的影响等一系列因素所导致的误报可能。显然这种一次性的抛出异常就作为提供预警信息发出是不够严密,且存在误报可能的。我们可以在此判断的基础上通过实验模拟及收集的数据对其进行二次判断以达到尽可能过滤这种客观环境,以及其他部分因素所造成的影响,从而降低错误报警的几率。
3.2 基于错误报警数据的分析
针对移动误报的情况,搜集了历次误报牌匾的数据,由于数据量较大,必须进行大量的数据比对和总结,根据巡检人员的记录以及数据库中所记录的数据,发现了一个比较有规律性的问题:
① 牌匾上对应的标签在未发生异动的情况下,其三轴加速度值理论上为一个定值X、Y、Z,把该值定义为正常姿态下的X、Y、Z,但实际情况是其大小会在理论值的标准上下浮动15左右。
② 这些误报的标签数据中正常姿态的X、Y、Z与异常报警的对应差值仅仅在20之内,差值之小根本就无法满足移动报警的判断差值为180的阈值,但为什么却报警了?以下表3、表4为各牌匾移动误报数据。
表3 XXXX1广告牌匾移动报警数据

状态信息CardIDXYZ正常姿态11.0.3.105241-13-10异常报警姿态11.0.3.105255-14-10异常报警姿态11.0.3.105254-13-8
表4 XXXX2广告牌匾移动报警数据
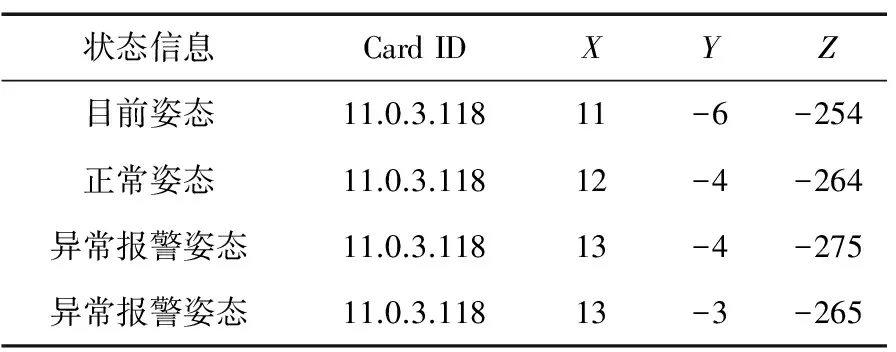
状态信息CardIDXYZ目前姿态11.0.3.11811-6-254正常姿态11.0.3.11812-4-264异常报警姿态11.0.3.11813-4-275异常报警姿态11.0.3.11813-3-265
经过思考不难推断:对30 min内数据进行逐行读取,解析三轴加速度X、Y、Z值,并对同一标签相邻时间点的X、Y、Z值进行比较,抛出最终异常值。大量的数据也可分析出受环境或硬件本身影响的数值是突然出现一个异常值而后直接正常引起移动报警,而非持续出现异常。其出现异常情况如图2所示模拟情况。
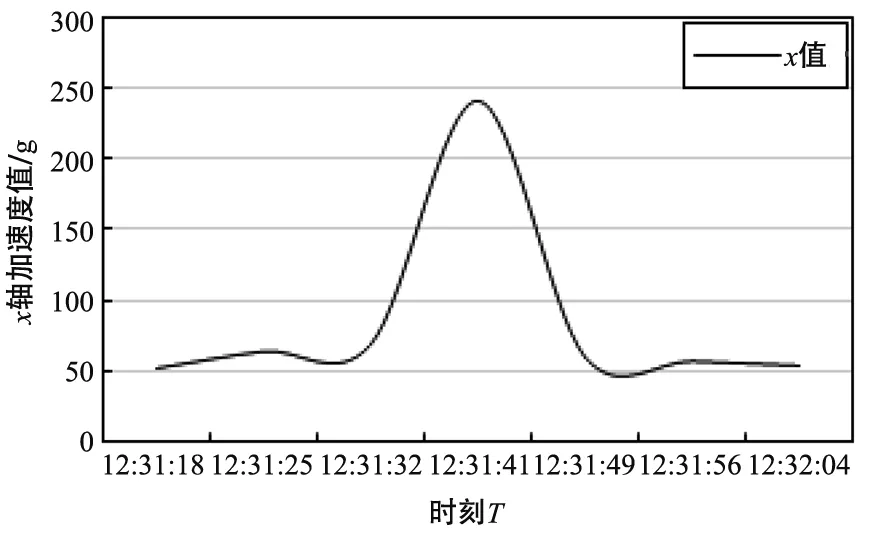
图2 异常数据模拟
3.3 基于真实移动报警数据分析
通过表5和表6的真实数据可以清楚地发现其标签正常姿态下的X、Y、Z与异常报警姿态下的相对差值会变得比较大,表5的相对差值的最大值为75,而表6的相对差值最大值为246,由此可以尝试通过设定一个新的阈值对这种移动误差进行二次的判断,但是通过这两个真实实例无法确定其具体的可以判断真正移动的阈值,只能证明真实的移动报警会有相对比较大的相对差值。为此必须通过大量的模拟拆卸实验去验证一个相对准确的阈值。
表5 XXXX3广告牌匾移动真实报警数据

状态信息CardIDXYZ正常姿态11.0.3.1758-8-248异常报警姿态11.0.3.175-67-39-243
表6 XXXX4广告牌匾移动真实报警数据

状态信息CardIDXYZ正常姿态11.0.3.104-237-4-15异常报警姿态11.0.3.1049242-13
3.4 模拟拆卸实验的验证
为了验证更加精确的阈值范围,选取一个与普通牌匾差不多大小的木板,将RFID标签固定在木板的侧面(与实际硬件部署一致),并将此木板悬挂于墙上,待其静止,打开RFID接收服务和RFID基站进行接收信号,然后分别对其进行多次模拟不同程度上的拆卸过程来记录其各种情况下整个过程的X、Y、Z值的变化规律,从大量数据中抽取了其最小到最大阈值中的情况,如表7、表8所示,模拟实验如图3所示。

图3 模拟实验
表7 阈值较小的模拟数据

时间TX加速度值Y加速度值Z加速度值12:03:02243-49012:03:18318-405712:03:31207-2010112:0355171-2212712:04:1111619-312:04:3363371412:04:5524926-5
表8 阈值较大的模拟数据
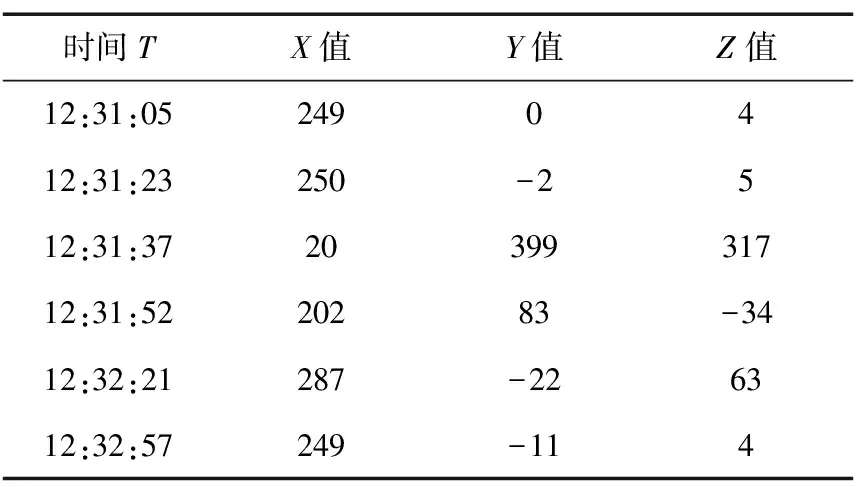
时间TX值Y值Z值12:31:052490412:31:23250-2512:31:372039931712:31:5220283-3412:32:21287-226312:32:57249-114
如图4和图5所示,通过这组模拟的数据可以发现X、Y、Z方向的加速度值在随着拆卸的过程都在不断发生变化,X方向发生的变化比较明显,根据移动报警的原始机制,每行读取,后一行对应的X、Y、Z相对进行相减运算,当差值超过180时抛出后一条数据,这样在最后一条(249,26,-5)这组数据会被抛出,被认定为异常报警数据,再进行二次判断机制,即将异常数据与最开始正常时的姿态(243,-49,0)的值进行相对应的相减运算,得到最大值即为一个判断阈值,此处Y对应差值最大为75。

图4 阈值较小的模拟数据折线图

图5 阈值较大的模拟数据折线图
这组数据是模拟的拆卸过程力度比较大的一种,因为有的店铺牌匾因为不再经营,便可能采取比较暴力的拆卸,通过这组数据的折线图可以明显看到其X、Y、Z三个方向的值比上一组数据变化要更加显著,通过这种模拟可以尽量得到阈值范围中尽可能大的值,根据首次的移动报警判断机制可以得出在(20,399,317)和(202,83,-34)这两组数据会抛出为移动报警的异常值。然后再通过二次判断的运算得出最大值分别为401和351,选取最大值为最大阈值,即为401。这样便可以暂且以75为二次判断的判断阈值,即大于等于75即可认为真实的移动报警。
4 移动报警机制算法及流程
假设有n条数据,每条数据都有X、Y、Z三个值,将该标签正常姿态下的X、Y、Z分别称为X正常、Y正常、Z正常,前一条数据为Xi、Yi、Zi,则后一条数据为Xi+1、Yi+1、Zi+1。 然后定义一个函数F(X)=MAX(X、Y、Z),即取括号中元素最大值。
① 正常姿态X正常、Y正常、Z正常值的获取
即获取同精度独立观测值的算术平均值,以一个牌匾上的标签为例,假设在一段时间内测得N条数据,可以得到N个X、Y、Z,则:
(1)
(2)
(3)
② 首次移动判断
F2(X,Y,Z)=MAX(Xi+1-X,Yi+1-Y,Zi+1-Z)。
(4)
对文件中的n条数据遍历运算,当F1(X、Y、Z)>180时抛出(Xi+1,Yi+1,Zi+1)即认为此为初次判断的移动报警异常值。
③ 二次移动判断
在首次判断的基础上对抛出的初次判断异常值进行再次判断。
F2(X,Y,Z)= MAX(Xi+1-X正常,Yi+1-Y正常,
Zi+1-Z正常)。
(5)
对抛出的初次判断异常值进行F2(X、Y、Z)运算,当F2(X、Y、Z)>75时抛出(Xi+1,Yi+1,Zi+1)为最终真实移动报警数据。移动报警判断流程如图6所示。

图6 移动报警判断流程
5 实验验证结果分析
将两种预警方式全都打开其短信发送功能,用以测试其准确性上的差异性,即通过单纯首次报警便发送短信的机制和通过二次报警收到的预警两种方式。通过单纯首次报警便发送短信的机制收到的预警短信数:从2017.5.23~2017.6.25 共19条,如图7所示。

图7 优化前判断发送的预警短信
通过二次报警收到的预警短信数:从2017.5.23~2017.6.25 准确说共3条,如图8所示。而就准确性而言首次判断的预警19条中成功预警1条,成功率1/19。而二次判断收3条,1条为成功,此时不能简单地说它的成功率为1/3,因为其排除了16条有问题的错误预警,且此3条中的后两条即错误报警的2条为6.13号和6.23号大雨标签进水所造成的,且为同一标签,且该标签现场证明已发现其个体防水存在问题造成,其他67个标签无此X、Y、Z数值突变现象,故该标签X、Y、Z数值突变为个别现象,只需更换掉该异常标签便可去除此单一故障标签引起的误报情况,其二次判断准确性还是很高的。

图8 优化后判断发送的预警短信
6 结束语
影响标签移动报警误报的原因很多,例如电子标签的系统低频响应差、系统低频信噪比差以及外界的各种环境因素都会对其造成影响。虽说RFID射频技术作为比较稳定的技术,但是对于长时间部署的实时监测系统,其错误的次数会随着时间的持续而增加。硬件上存在的误差可能无法真正解决,因为再精密的仪器也存在误差,但是可以通过测绘中平差的思想,对其误差进行一系列的“平差”处理,便可以尽可能地在原有基础上提高精度和准确性,从而满足工程的需求。
[1] 王志伟,闫秀霞,孙宝连.RFID技术应用研究综述及研究趋势展望[J].物流技术,2014,33(9):1-5,10.
[2] 王洪钟,武利亚.信息化城市管理的成功实践——无线传感器网络技术应用于户外广告监管系统[J].城市管理与科技,2009,11(4):46-49.
[3] 徐兵,王晗.基于GIS的城市数字交通管理信息系统设计开发[J].计算机与数字工程,2005 (12):16-18,42.
[4] 王永.RFID系统中的碰撞问题研究[D].上海:华东师范大学,2009.
[5] 李剑丹.RFID系统中多阅读器环境下防碰撞问题的研究[D].武汉:武汉理工大学,2014.
[6] 李雪,陆百川,李政.RFID系统多阅读器防碰撞问题研究[J].重庆交通大学学报(自然科学版),2012,31(3):435-438,442.
[7] 陈敏,殷瑞祥.RFID系统中阅读器碰撞问题的研究[J].金卡工程,2005(4):30-33.
