10 kW组合型振荡浮子波浪发电装置的电力变换与控制系统
2018-02-28张家明史宏达
张家明, 黎 明, 刘 臻, 史宏达
(中国海洋大学工程学院,山东 青岛 266100)
当今世界,传统的化石能源正在消耗殆尽,开发并利用可再生能源已成为解决能源危机的必然手段,而占地球总面积71%的海洋,其蕴藏着极大的能量的事实正在被世人逐步地发现[1]。海洋能源的形式多种多样,诸如潮汐能,海流能,波浪能,盐差能等等,其中,波浪能作为一种可再生海洋清洁能源,具有能量密度大、分布面积广等优点[2-3],如何将波浪能转化为电能,并实现这一技术的产业化、规模化和商业化,成为各国在研究并开发海洋能源领域的亟待解决的问题。
按照能量转换中间环节,波浪发电装置的形式可以分为机械传动式、气动式、液压式三大类[4-5],本文论述的一种组合型振荡浮子波浪发电装置,从能量转换角度划分属于液压式,与电力变换与控制系统相配合,实现波浪能到电能的三级能量转换—第一级:波浪能到浮子振荡机械能;第二级,浮子振荡机械能到液压能;第三级,液压能到电能。
1 波浪发电装置概述
组合型振荡浮子波浪发电装置是一种新型波浪能发电装置,主要组成部分包括潜浮体、4个浮子及其支撑导向结构、液压系统、电力变化与控制系统。单个浮子结构示意图如图1(a)所示,图1(b)为组合荡浮子波浪发电装置在码头的装配实体图,所有的电力变换与控制系统均安置于发电平台上。


图1 波浪发电装置Fig.1 Wave energy converter
其工作原理如下:4组浮子依靠自身浮力浮在海面上,同时在波浪的推动下,沿装置支撑结构(导向杆)做上下振荡运动,浮子捕获波浪能转化为自身的振荡机械能,此时完成第一级能量转换;浮子振荡时带动安装在其上方的液压缸活塞运动,推动油缸内液压油,再经过液压系统内转化、平衡、稳压,完成浮子振荡机械能到液压能的第二级能量转换;液压系统驱动液压马达带动发电机运转,完成能液压能到电能的第三级能量转换。
2 电力变换系统
图2即为组合型振荡浮子波浪发电装置的电力变换系统拓扑结构。发电机为三相永磁同步发电机(PMSG),装机容量为15 kW,与液压马达同轴相连,液压马达由液压系统驱动,带动发电机运转。发电机在运转时,输出的三相交流电首先经过EMI低通滤波器进行滤波,滤除高频谐波后进行不可控整流,再经过boost升压斩波电路进行升压。升压后,利用铅酸蓄电池组来吸收和存储发出的电能,同时起到稳定和支撑直流母线电压的作用,保证了后续DC-AC逆变电路输出稳压稳频交流电。配备了电池管理系统(Battery Management System,缩写为“BMS”)用以实时监控蓄电池组的充放电压、电流以及荷电状态(State of Charge,缩写为“SOC”),确保蓄电池组的安全、高效充放电。逆变电路为电压源型三相全桥逆变电路,采用双极性SPWM控制技术,逆变输出的三相交流电经过三相变压器进行升压、滤波后,即可输出三相380VAC和单相220VAC交流电,频率为50 Hz,用以供给发电平台上的用电设备,例如4台异步电机、控制系统的电源系统以及平台照明设备,另外,如果发电机输出瞬时功率过高,控制系统会立即控制三相星型卸荷电阻接入逆变器,使得发电机制动减速。

图2 电力变换系统拓扑结构Fig.2 Topology of the power conversion system
组合型振荡浮子波浪发电装置为离网型发电装置,发出的电能不并入市电电网,一部分存储在铅酸蓄电池组中,另一部分供给平台上的用电负载。表1给出了三相永磁同步发电机的电气参数,发电机定子绕组为星形连接。
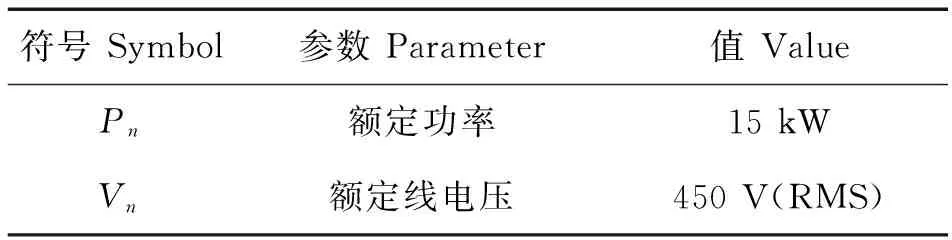
表1 三相永磁同步发电机电气参数Table 1 Electrical parameters of three-phase permanent magnet synchronous generator
续表1

符号Symbol参数Parameter值ValueIn额定线电流20A(RMS)Tn额定扭矩800N/mωn额定转速180rad·min-1p极对数17Rs定子绕组电阻0.22ΩLd=Lq定子dq轴电感11.9mH
3 控制系统
3.1 电控系统
3.1.1 boost升压 海上波浪的随机性,以及液压系统的直驱特性(液压系统内部无蓄能器等蓄能设备),决定了发电机一直处在断续运转的工况,从而使整流后的直流母线电压不可避免的产生波动[6-7]。采用了蓄电池组作为中间储能环节来抑制这种波动性,以平滑和支撑直流母线电压。为了达到蓄电池组的有效充电电压,使用了boost升压斩波电路对不可控整流后的直流电压进行升压处理。图3(a)为boost升压斩波电路及其控制系统结构图,图3(b)给出了该电路的稳态图[8-9]。
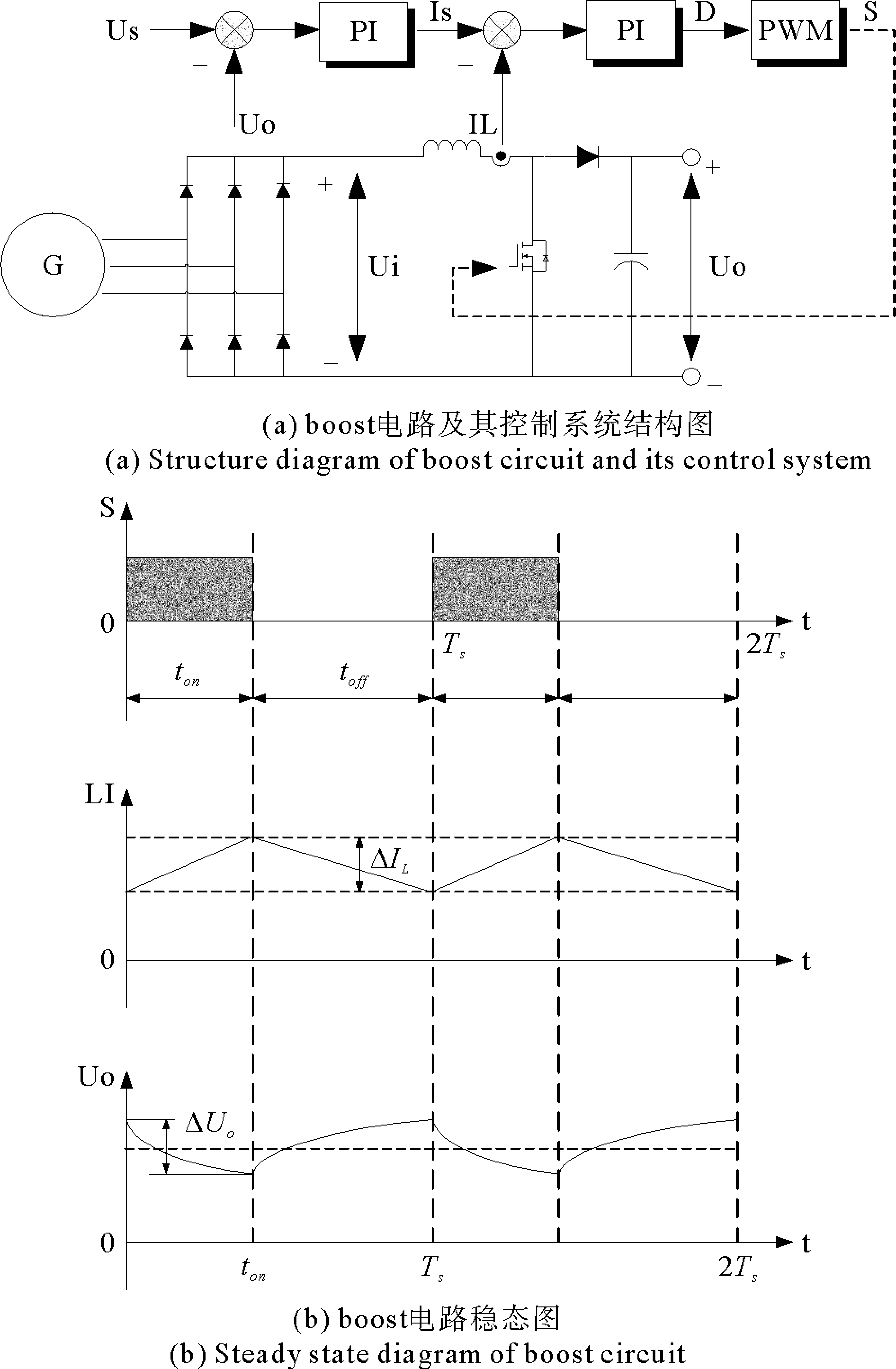
图3 boost升压控制电路及其稳态图Fig.3 Boost control circuit and stabilization diagram
控制系统的结构为双闭环串级控制系统,外环为电压换,内环为电流环,控制算法为增量式PI算法,这样做充分发挥了串级控制系统快速响应的优势[10-11],使得一个波浪周期(通常小于8 s)内,boost电路能够尽快达到稳态。设PWM信号的占空比为D,则boost电路的输入输出稳态特性如式(1)所示。
(1)
3.1.2 电池管理系统(BMS) 为了维护蓄电池组的可靠、安全、有效运行,设计了BMS(电池管理系统)以实时监控蓄电池组的电压、电流、SOC以及温度等关键参数,并依据蓄电池组的SOC状态,确定蓄电池组的充放电控制策略。蓄电池组的等效电路如图4[12]所示,IB为蓄电池组的充电电流,UB为蓄电池组的端电压;Rt为等效内阻,这与蓄电池单体个数以及串并联方式有关;电阻Rb与电容Cb的并联电路用以描述超电势Ub;Rs为等效串联电阻;电阻Rp与电容Cp的并联电路用以描述蓄电池组的自放电。

图4 蓄电池组的等效电路Fig.4 The equivalent circuit model of battery
根据图4所示的等效电路,可以得到如下表达式:
(2)
(3)
IB=(UB-Up-Ub)/(Rt+Rs)
。
(4)
蓄电池组等效模型中的Cp由电池的储能点量和Up的取值范围决定,Up的上下限分比为Up_max和Up_min,满足式(5),其中,J为蓄电池组的储能电量,单位为kW·h。
(5)
电池的SOC取决于电池的最大容量[13]Q,单位为A·h,满足式(6),其中,iB(t) 为蓄电池的瞬时充电电流,SOC0为电池的初始荷电状态。
(6)
蓄电池的储能电量、最大容量与电池的端电压满足式(7),其中UB_nom为电池的额定端电压。 为了保持电池的长期有效、安全和高效运行,需要把SOC控制在0.2~0.9之间[14-15]。
Q=J/UB_nom。
(7)
BMS根据电池的SOC确定电池的充放电控制策略,主要决策依据就是蓄电池的当前SOC。当蓄电池的SOC<0.2时,即认为蓄电池处于过放状态,采用过放控制模式;当蓄电池的SOC在0.2~0.9之间时,即认为蓄电池处于正常工作状态,采用正常控制模式;当蓄电池的SOC>0.9时,即认为蓄电池处于过充状态,采用过充控制模式。三种控制模式的控制系统结构图分别如图5(a),5(b)和5(c)所示。

图5 BMS 控制模式Fig.5 Control Mode of BMS
图5(a)~(c)中,Uo为boost升压斩波电路的输出电压,Imax为蓄电池的最大安全充电电流。 采用的是双闭环恒压充电策略并加以电流限幅,有效克服了恒压充电初期蓄电池充电电流过大的缺点。在蓄电池组进入过放控制模式后,控制系统在执行图5(a)所示的控制策略时,会自动切断平台照明设备某些非重要负载的供电,减缓蓄电池的放电速率;在蓄电池组进入过充控制模式后,控制系统在执行图5(c)所示的控制策略时,会控制卸荷电阻接入逆变器,发电机立刻进入制动减速状态,减少蓄电池的能量输入。
3.2 潮位自适应控制系统
如图1(a)所示,浮子与液压缸的活塞杆刚性连接,浮子依靠自身浮力浮在海面上,随波浪上下振动,推动活塞杆在液压缸内往复运动。海面某一时刻的水位实际上是当前时刻的潮位叠加波浪形成的,以青岛市为例,青岛海域每天的潮差平均为3 m左右,最大潮差可以达到4 m以上(所谓潮差指的是每天的一个潮汐周期内,相邻高潮位与低潮位间的差值,又称潮幅)。也就是说,即便一天内不出现波浪,海水水面完全静止,活塞杆的行程也会有平均3 m左右,甚至达到4 m以上。通过加大液压缸的长度来保证活塞杆的行程是没有可行性的,考虑到潮位叠加波浪,液压缸的长度将会达到5 m以上,加工难度极大,并且会影响整个装置的结构稳定性。
设计了潮位自适应控制系统以克服潮差问题,控制系统由潮位检测装置、螺旋升降器及其驱动系统以及控制器组成。该控制系统的工作原理为:由潮位检测装置识别出潮位的涨落并输出开关量信号给控制器,控制器接收到开关量信号后,根据设计的程序逻辑输出相应的控制信号给螺旋升降器的驱动系统,再由驱动系统提升或下放螺旋升降器的螺杆。液压缸体与螺杆刚性连接,因此液压缸就可以随潮位的涨落沿着导向杆上下移动。最终实现的控制效果是:不论潮位的涨落,液压缸的位置总是与静水条件下浮子的位置保持固定的距离,有效克服了潮差带来的液压缸活塞杆行程不足的问题,同时确保了液压缸不出现顶缸或脱缸的危险情况。
潮位检测装置由验潮井和液位开关组成。验潮井利用的是连通器原理,验潮井内的液位只会随着潮位的变化而变化,瞬时的波浪不会影响验潮井内的液位,因此可以不受波浪的影响准确获取当前时刻潮位的静水面。液位开关的示意图如图6所示,为连杆式浮球液位开关,主要的检测机构为3个浮球,每个浮球都由固定环确定了其浮动范围,在其浮动范围内可以触发连杆内部的磁簧开关的闭合与关断,从而在潮位涨落时适时给出开关量信号。整个潮位检测装置与液压缸刚性连接,提升液压缸的同时潮位检测装置也会同步运动。

图6 液位开关示意图与实物图Fig.6 Schematic and physical figure of level switch
螺旋升降器的驱动系统由三相交流异步电机和变频器组成,变频器在接收到控制器输出的控制信号后,控制异步电机的正反装,进而提升或下放螺杆。控制器选用西门子S7-200PLC—CPU226CN-AC/DC/RELAY。图7为控制系统工作流程示意图。
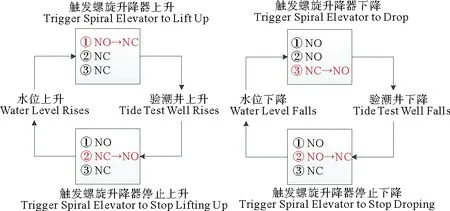
图7 潮位自适应控制系统工作流程图Fig.7 Work flow chart of tide self-adaptive control system
3.3 远程无线监控系统
基于GPRS-Ethernet无线网络通信架构,配备无线通信硬件设备并开发了远程监控上位机软件,用以实现对海上无人值守的波浪发电平台的远程、无线实时监控,可实时获取、记录并查询装置电力变换及其控制系统的各项电气运行参数,以及潮位自适应控制系统的当前运行状态及故障信息,同时,还可通过上位机软件,对平台上的电控系统与潮位自适应控制系统随时施加人为干预,实现启、停控制、手/自动切换以及控制策略切换等功能,真正做到了发电平台的无人值守与远程遥控。图8即为远程无线监控系统的通信系统拓扑结构图,其中(a)为电控系统的远程无线监控系统通信拓扑结构图,(b)为潮位自适应控制系统的远程无线监控系统通信拓扑结构图,增加了高频无线电传输用以短距离(小于2 km)遥控。
在进行远程无线监控的时候,上位机软件都是在跟发电装置平台上的控制室内的控制终端设备进行通信,例如电控系统的控制器和潮位自适应控制系统所采用的S7200-PLC。对电控系统和潮位自适应控制系统的远程监控是完全同步、实时进行的,采用的通信协议均为ModBus-RTU协议。图8(c)为远程监控上位机软件的实时监控界面。

图8 远程无线监控系统Fig.8 Remote wireless monitoring and control system
4 海试结果
组合型振荡浮子波浪发电装置于2014年1月10日约14时成功布放于青岛市黄岛区斋堂岛东南方向约1 km的海域,投放当天即开始正常工作。图9(a)即为装置2014年1月13日海试图,(b)为发电平台电控室内的电力变换与控制系统电控柜。
图10(a)为2014年1月13日斋堂岛海域0~23时的每小时平均波浪功率(kW)的折线图,(b)为同日0~23时发电机瞬时输出功率曲线。图(c)为同日斋堂岛海域0~23时的潮位,图(d)潮位自适应控制系统记录的同日0~23时3号浮子与液压缸的相对距离,可以看出,尽管一天之内潮差达到了2.53 m,但是浮子与液压缸的相对距离一直稳定在100 cm附近,这与装置刚投放入水时人工调整的浮子与液压缸的相对距离是一致的,说明潮位自适应控制系统具有良好的控制效果。
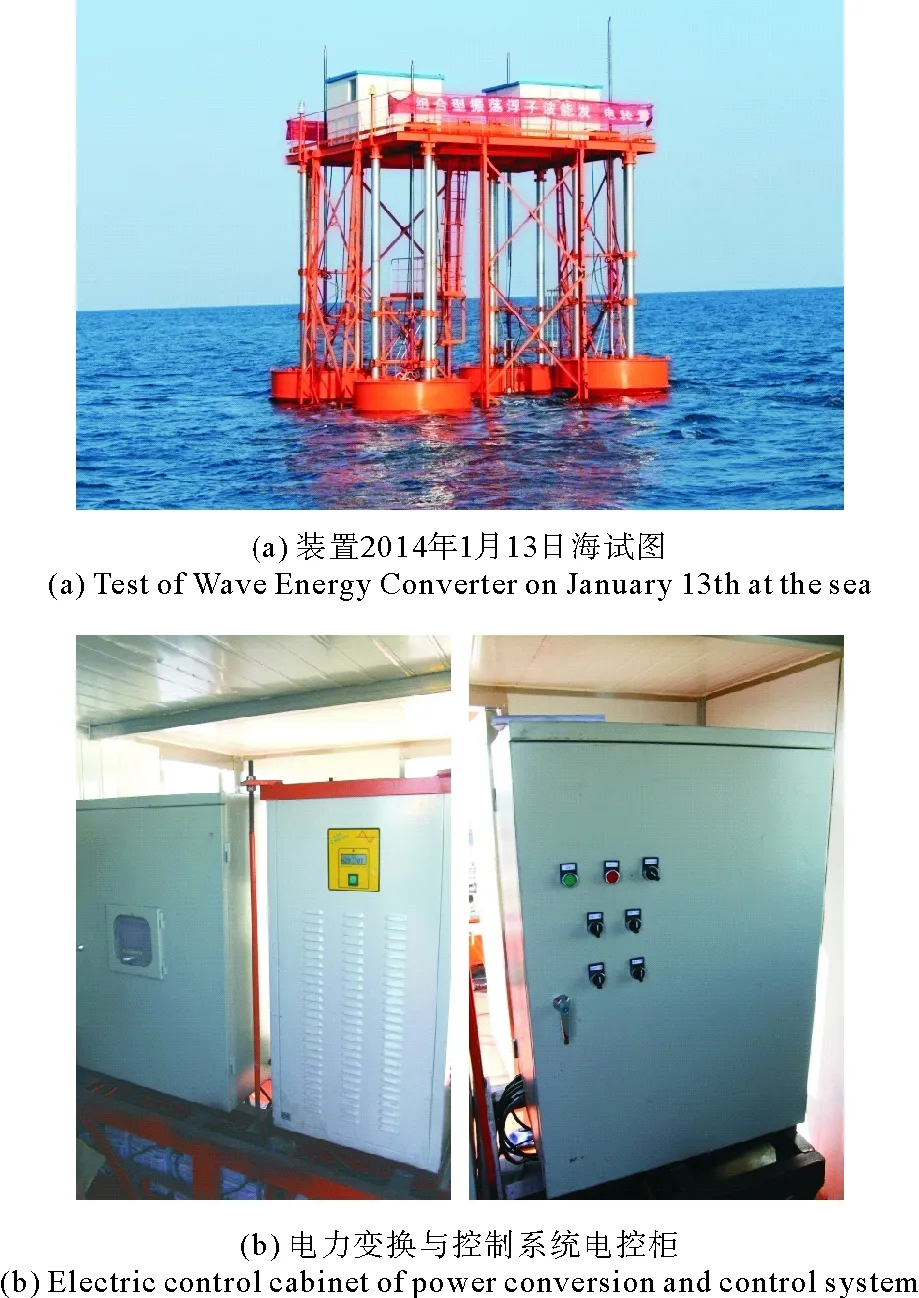
图9 波浪发电装置装置海试Fig.9 Sea test of wave energy converter
装置自投放之日起,运行至2014年1月29日19时,有效运行时间约20 d,在实海况条件下从波浪功率到发电功率的平均能量转换效率达到18.2%,累计发电量达到558 kW·h,图10(e)为2014年1月10日—29日每日发电量与逐日累计发电量。2014年1月29日19时,通过远程无线监控系统,对四台螺旋升降器进行了远程遥控,闭锁了浮子结构。

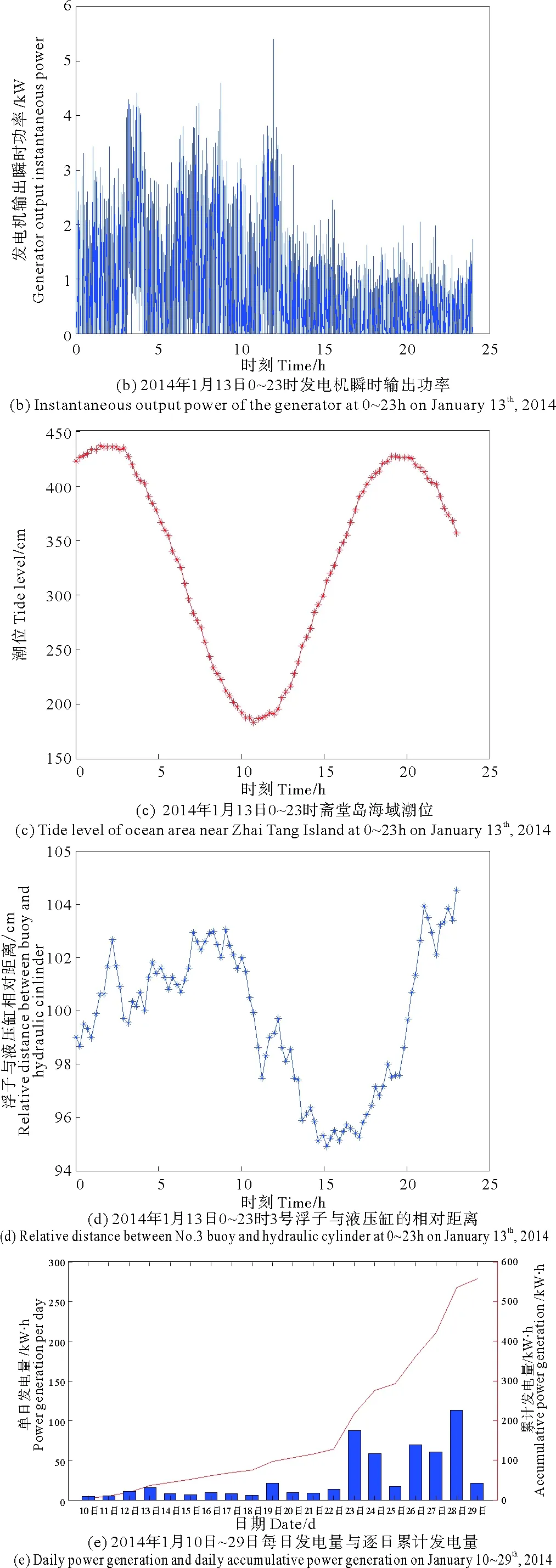
图10 海试结果Fig.10 Sea test results
5 结语
10 kW组合型振荡浮子波浪发电装置的成功下水与运行,标志着我国在阵列化波浪能发电装置的开发与工程应用领域取得了突破性的进展,设计并开发的电力变换与控制系统切实保障了波浪能到电能的转化效率,经受住了恶劣海况的考验,为我国波浪能资源的低成本、规模化与民用化开发与利用打下了坚实的基础。
[1] 游亚戈, 李伟, 刘伟民, 等. 海洋能发电技术的发展现状与前景[J]. 电力系统自动化, 2010, 34(14): 1-12. YOU Yage, LI Wei, LIU Weimin, et al. Development Status and Perspective of Marine Energy Conversion System[J]. Automation of Electric Power systems, 2010, 34(14): 1-12.
[2] 聂宏展, 张明, 申洪, 等. 波浪能发电及其对电力系统的影响[J]. 华东电力, 2013, 41(1): 190-195. NIE Hong-zhan, ZHANG Ming, SHEN Hong, et al. Wave energy Generator and their Impact on Power System[J]. East China Electric Power, 2013, 41(1): 190-195.
[3] 高人杰. 组合型振荡浮子波能发电装置研究[D]. 青岛: 中国海洋大学, 2012 Gao Renjie. Study on Combined Oscillating Floater Buoy Wave Energy Converter[D]. Qingdao: Ocean University of China, 2012.
[4] 盛松伟, 游亚戈, 张亚群, 等. 漂浮式波浪能装置能量转换系统研究[J]. 机械工程学报, 2012, 48(24): 141-146. SHENG Songwei, YOU Yage, ZHANG Yaqun, et al. Research on Power Take-off System of Floating Wave Power Device[J]. Journal of Mechanical Engineering, 2012, 48(24): 141-146.
[5] R. Sabzehgar, M. MoallemA. Review of Ocean Wave Energy Conversion Systems[C]. //Electrical Power & Energy Conference (EPEC), IEEE, 2009: 1-6.
[6] 吴峰, 张小平, 鞠平. 电池储能在直接驱动式波浪能发电场并网运行中的应用[J]. 电力系统自动化, 2010, 34(14): 31-36. WU Feng, ZHANG Xioaping, JU Ping. Appliacation of Battery Energy Storage in the Direct-drive Wave Energy Conversion Farm Integrated into Power Grid[J]. Automation of Electric Power systems, 2010, 34(14): 31-36.
[7] 孙洲平, 吴必军, 李春林. 漂浮直驱式波浪能发电装置的负载控制设计[J]. 可再生能源, 2012, 30(12): 26-34. SUN Zhou-ping, WU Bi-jun, LI Chun-lin. Load control design of floating direct-drive wave energy device[J]. Renewable Energy Resources, 2012, 30(12): 26-34.
[8] 王荃荃, 秦川, 鞠平, 等. 考虑电池储能系统荷电状态的近海可再生能源综合发电协调控制[J]. 电网技术, 2014, 32(1): 80-86. WANG Quanquan, QIN Chuan, JU Ping, WU Feng. A Coordinated Control Strategy for Hybrid Offshore Renewable Energy Power Generation Considering State of Charge of Battery Energy Storage System[J]. Power System Technology, 2014, 32(1): 80-86.
[9] Nicolas Muller, Samir Kouro, Jaime Glaria, Mariusz Malinowski. Medium-voltage power converter interface for Wave Dragon wave energy conversion system[C]. IEEE Energy Conversion Congress and Exposition (ECCE), 2013 : 352-358.
[10] Z. Zhou, W. Knapp, J. MacEnri, H. Ch. Sorensen, E. Friis Madsen, I. Masters1 and Petar Igic. Permanent Magnet Generator Control and Electrical System Configuration for Wave Dragon MW Wave Energy Take-off System[C]. //Industrial Electronics, ISIE, IEEE International Symposium, 2008: 1580-1585.
[11] 平朝春, 张理, 郝富强, 等. 海洋可再生能源发电系统的电能变换与能量管理系统关键技术研究[J]. 中国海上油气, 2013, 25(6): 119-123. Ping Zhaochun, Zhang Li, Hao FuQiang, et al. Study on the key techniques of marine renewable energy power generation system[J]. China Offshore Oil and Gas, 2013, 25(6): 119-123.
[12] Lu CF, Liu CC, Wu CJ. Dynamic modelling of battery energystorage system and application to power system stability[J]. IEE Proceedings of Generation, Transmission and Distribution, 1995.
[13] 丁明, 陈忠, 苏建徽, 等. 可再生能源发电中的电池储能系统综述[J]. 电力系统自动化, 2013, 37(1): 19-25. DING Ming, CHEN Zhong, SU Jianhui, et al. An Overview of Battery Energy Storage System for Renewable Energy Generation[J]. Automation of Electric Power systems, 2013, 37(1): 19-25.
[14] Giannoutsos SV, Manias S N. A cascade control scheme for a grid connected battery energy storage system (BESS)[C]. //IEEE International Energy Conference and Exhibition (ENERGYCON) . Florence, Italy: IEEE, 2012,469-474.
[15] Dang J, Seuss J, Suneja L, et al. SOC feedback control for wind and ESS hybrid power system frequency regulation[C]. //IEEE Power Electronics and Machines in Wind Applications (PEMWA). Denver, USA: University Denver and National Renewable Energy Laboratory (NREL), 2012: 16-18.