基于树莓派的松果采摘机器
2018-02-26王力程陈锐韩旭苏龙霞丁永昌
王力程 陈锐 韩旭 苏龙霞 丁永昌


摘要
基于Wi-Fi传输技术、PWM控制技术和蓝牙技术,构建基于树莓派的松果采摘机器。系统主要由上位机信息处理和下位机信息采集两部分组成,其中下位机由图像捕获技术、Wi-Fi、蓝牙无线传输技术和机械臂执行模块构成本系统硬件结构简单、系统稳定、适用范围广,能够代替人工进行危险高空作业。
【关键词】物联网 高空作业 蓝牙 Wi-Fi
1 需求分析
1.1 需求分析
松果,别称:松塔,为松科植物的种子,成熟后内有松子。可作药用,有祛风止痛、消炎止血、滋养强壮的功效,样子像峰塔,具有一定的药用价值,然而松树的整体较高,导致目前松果的获取方法是人爬上20米以上的松树进行人工采摘,危险系数较高。主要存在以下问题:
(1)人工采集效率低,成本高。本设计首先考虑采摘效率,力图通过机器作业,减少作业时间,降低人工成本,提高松子的收货量,满足市场日益增加的需求。
(2)完善生产安全措施,由于采摘松子仍然由人工完成,然而人工采摘松子最主要的缺点是对于人身安全有很大风险,本作品能够代替人工作业,避免工人的危险,提高安全性。我们使用爬树机器人与机械手臂以及监控系统结合的方式,一方面提高安全性,另一方面提高效率从而降低了成本。
1.2 设计思路
一种基于树莓派的可爬树果实采摘机器,第一点,采摘机器结构介绍:树莓派是机械臂的CPU。其通过拓展板与机械臂上的舵机相连,从而可以通过手柄对机械臂进行控制。其上连接着一个摄像头。摄像头可以实时传输视频到手机APP上。用户可以观察手机APP上的视频进而确定松果的位置。另外安装了一个网络摄像头,以第三人称的视角观测机械臂的位置及情况,从而方便用户进行控制。当机械臂到达人眼无法观测的位置时,我们可以通过第三视角的网络摄像头进行观测,从而进行操作。第二点,移动机器介绍:此机器由一个主动轮、一个从动轮和一个涡轮蜗杆电机构成。其与杆子之间形成杠杆结构。由于其杠杆原理和涡轮蜗杆电机,当机器不供电时,物体不会落下,当机器正负极接电源正负极时,机器向上行驶,反接时,机器向下行驶。该机器上下有两个V形的尖状物体,上或下时与树枝进行摩擦,从而进行转向
2 特色与创新
2.1 项目创新
本作品以爬树机器人与机械手臂以及监控系统结合的方式代替人工采摘松籽,一方面降低了人工作业的危险,提高了安全性,另一方面提高了工作效率,降低了成本,从而大大增加收益,同时满足了日益增加的对松籽的市场需求。
3 总体设计
3.1 总体设计
采摘机器人是由一个爬树机器人平台搭载机械手臂和监控系统构成。机械手臂中植入树莓派芯片,通过Wi-Fi与手机、PC、或者手柄连接而实现控制的目的,只通过Wi-Fi连接使得连接过程大大减少所花费的时间。
监控系统从外观看看似独立于总系统,其实它是通过手机APP或者PC端软件将监控功能与控制功能结合集成在同一应用里,在控制的过程中实现实时监控,代替人眼,保证整个控制过程中的精确性以及稳定性,Wi-Fi可靠的带宽以及软件高效的数据采集算法尽可能降低了视频传输的延迟,保证了视频信息的实时可靠。
爬树机器人的电气特性方面,由于需要多个I/O口控制舵机运转,所以采用树莓派作为控制芯片;机械特性上,采用非仿生设计,大大提高了负载能力,保证机械手臂的稳定。
3.2 采摘机器概念系统组成
如图1所示。
4 系统实现
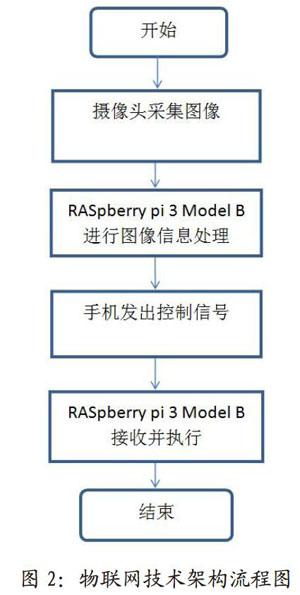
4.1 物联网技术架构
如图2所示。
附图说明:摄像头采集图像信息,通过Raspberry pi 3 Model B进行图像信息的处理,然后传输到手机上,从而能够在手机上实时观测爬树机器人的周围情况,以便于操控者通过手机发出控制爬树机器人的的信号,最终实现代替人手采摘松果的功能。
4.2 感知层技术
本作品以摄像头作为基本传感器件进行图像采集实现实时监控。该摄像头采用CMOS光学镜头,景物通过镜头生成的光学图像投射到图像传感器表面上,然后转为电信号,经过A/D(模数转换)转换后变为数字图像信号,通过无线Wi-Fi传输至显示器看到图像。如图3所示。
4.3 传输层
本设计中传输层技术主要是控制部件与执行部件的通信传输,采用的是Wi-FiWireless-Fidelity,无线高保真)无线通信协议,正式名称是IEEES02.11b,与蓝牙一样,同属于短距离无线通信技术。Wi-Fi速率最高可达11Mb/s。虽然在数据安全性方面比蓝牙技术差一点,但在电波的覆盖范围方面却好于蓝牙,可达100m左右,完全满足本设計的对控制距离的需求,手柄、手机和PC端都可通过Wi-Fi对整机实现控制,而且手机和PC端还通过Wi-Fi进行视频传输。
4.4 控制层
本设计控制层由TBS2701舵机、上位机、Raspberry pi 3 Model B构成。舵机由直流电机、减速齿轮组、传感器和控制电路组成的一套自动控制系统。本设计采用数字舵机,它区别于传统的模拟舵机,模拟舵机需要给它不停的发送PWM信号,才能让它保持在规定的位置或者让它按照某个速度转动,数字舵机则只需要发送一次PWM信号就能保持在规定的某个位置,利用占空比的变化改变舵机位置。本设计采用raspberry pi 3目的:控制摄像头捕获视频传输视频,使操作者准确定位松果位置进而采摘松果;接受上位机指令控制舵机执行动作即采摘松果。
4.4.1 控制核心
本设计采用raspberry pi 3为CPU,其控制摄像头捕获视频传输视频,使操作者准确定位松果位置进而采摘松果;其上位机指令控制舵机执行动作即采摘松果。如图4所示。
4.4.2 舵机
本设计采用舵机:
(1)舵机名称:TBS2701
(2)技术参数:尺寸:40mm×20mm×36.5mm,重量:62g,控制方式:串口指令,通信波特率115200,工作电压5-8.4v转动速度:0.13sec/60°(4.8v)0.15sec/60°(6v)舵机精度:0.24°。
控制原理:本设计采用数字舵机,它区别于传统的模拟舵机,模拟舵机需要给它不停的发送PWM信号,才能让它保持在规定的位置或者让它按照某个速度转动,数字舵机则只需要发送一次PWM信号就能保持在规定的某个位置,利用占空比的变化改变舵机位置。其工作流程为:控制信号一控制电路板一电机转动一齿轮组减速一舵盘转动一位置反馈电位计一控制电路板反馈。舵机的控制一般需要一个20ms的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。舵机原理图及结构图如图5所示。
4.4.3 移动机器
如图6所示,此机器由一个主动轮、一个从动轮和一个涡轮蜗杆电机构成。其与杆子之间形成杠杆结构。由于其杠杆原理和涡轮蜗杆电机断电自锁功能,当机器不供电时,物体不会落下,当机器正负极接电源正负极时,机器向上行驶,反接时,机器向下行驶。该机器上下有两个V形的尖状物体,上或下时与树枝进行摩擦,从而进行转向。
涡轮蜗杆电机:全金属齿轮,可配合调速器控制转速(可控范围0一选定的空载转速),电机可正反转,JGY370涡轮蜗杆电机具有断电自锁功能,齿轮承受力约30KG,该款电机有6V 12V 24V三款,本作品采用12V电机,每分钟空载转速有:160rpm/min。
参考文献
[1](美)布拉德伯里(Bradbury,A.)等著;王文峰译.树莓派Python编程指南[M].北京:机械工业出版社,2015.
[2](美)勃鲁姆(Blum,R.),(美)布莱斯纳罕(Bresnahan,C.)著.王超,馬立新译.树莓派Python编程入门实战[M].北京:人民邮电出版社,2015.
[3](英)阿普顿(Upton,E.),(英)哈菲克(Halfacree,G.)著;张静轩等译.树莓派用户指南:第三版3版[M].北京:人民邮电出版社,2016.
[4](美)卢茨(Lutz,M;邹晓等译.Python编程:第四版[M].北京:中国电力出版社,2015.