基于α-β滤波的雷达多目标跟踪精度影响分析
2018-02-26张文辉张永宁陈丁
张文辉 张永宁 陈丁


摘要
为了解决多目标跟踪状态下,雷达跟踪测量精度会降低的问题,文中基于α-β滤波算法就多目标跟踪对跟踪精度的影响进行了分析,并对跟踪精度进行预估算例验证表明,该方法可准确佑计雷达跟踪的位置精度。
【关键词】雷达跟踪精度 多目标 跟踪α-β滤波
通常,多个目标运动状态存在不确定性,这样也会造成雷达探测结果的不稳定。显然,就必须对多个目标的运动状态进行估计和预测,来减小这种不确定性。本文针对航迹处理需进行航迹平滑滤波的特点,在雷达资源有限,通过改变时序调度,增加目标数量时,提出了分析了多目标跟踪状态对雷达精度影响,有助于工程上雷达跟踪精度的提高。
1 动目标模型
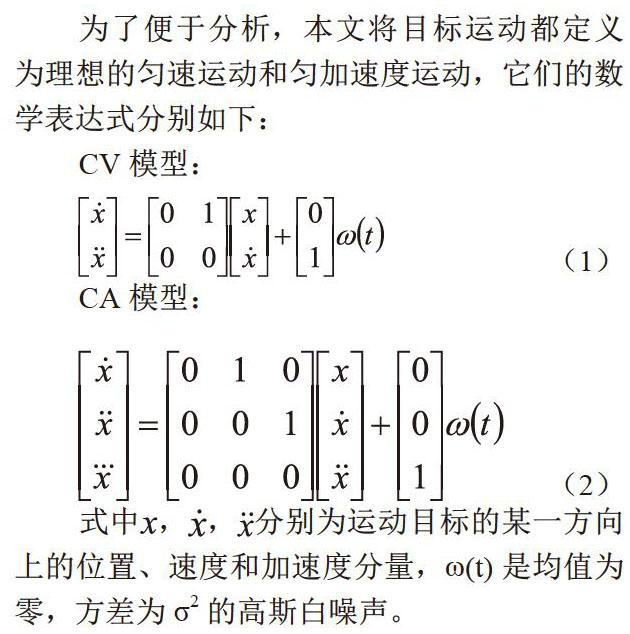
为了便于分析,本文将目标运动都定义为理想的匀速运动和匀加速度运动,它们的数学表达式分别如下:
CV模型:
CA模型:
式中x,分别为运动目标的某一方向上的位置、速度和加速度分量,ω(t)是均值为零,方差为σ2的高斯白噪声。
上式可以看出,CV和CA模型都线性模型,这给目标跟踪算法提供了方便,简化了计算。
2 多目标跟踪滤波算法
目标跟踪中滤波和估计的目的,是估计当前和未来时刻目标的运动状态,主要是指目标的位置与速度估计。α-β是一种简单并且易于工程实现的常增益滤波方法,已被广泛应用于跟踪滤波器的设计过程中,其最大的优点在于增益矩阵离线计算,循坏滤波的时候减少了大量的计算。本文针对此算法,构建了数学模型,对同一雷达在不同目标数量时的精度进行了分析计算。
当目标作匀速运动时,描述目标运动的状态X是两位向量,分别表示位置和速度分量。
设目标状态方程为:
X(k+1)=FX(k)+Gω(k)(3)
式中,ω(k)均值为零,方差为4的高斯白噪声,T为对目标的采样周期。
观测方程为:
y(k)=HX(k)+v(k)(4)
其中H=[10],v(k)是零均值,方差为r的高斯白噪声。
则α-β滤波方程为:
上式中的α、β可以随着k变化,但计算较复杂;若假定α、β为常数,计算要简化得多。
在多目标精密跟踪雷达中,由于雷达跟踪目标数量的不同,在目标跟踪滤波中,预测时间将会不同,这将导致跟踪精度的起伏。
3 算例验证
通常,对于多目标跟踪雷达,目标数量增加,势必影响雷达对目标跟踪距离,还对跟踪精度有一定的影响。按上述分析原理和滤波算法,假定雷达资源一定的前提下,分别设置雷达跟踪目标的数量为n和2n,则目标跟踪预测时间为t和t/2。下面对雷达跟踪两种不同目标个数时精度进行分析。
预定参数设置:
(1)设定一组匀速运动的航迹目标;
(2)通过改变随机噪声幅度,统计两种延迟量下的起伏误差,得出两种延迟量下起伏误差相对变化值;
(3)利用蒙特卡洛算法在同一噪声幅度條件下,统计100次误差结果(取均值)。
图1为雷达跟踪不同数量目标时,对设定的航迹目标距离起伏误差、俯仰角起伏误差以及方位角起伏误差的影响分析统计结果。
仿真结论:
(1)目标跟踪时,雷达资源有限的前提下,跟踪目标通道数越多,则跟踪外推时间越长;
(2)跟踪外推时间越长,则对目标起伏误差影响越大;
(3)跟踪外推时间长短对目标跟踪系统误差不造成影响。
4 结论
本文针对α-β滤波算法提出了一种计算航迹精度方法。算例表明,该方法能够近似预测出航迹精度。在跟踪雷达目标通道数量发生变化时,该方法无需预知目标真实位置和传感器测量精度,可预测出雷达目标跟踪精度,因此应用场合的条件限制相对宽松,具有一定的工程应用价值。
参考文献
[1]张文辉.多目标跟踪算法及参数影响分析[J].电光与控制,2009.