计算机视觉在幕墙机器人角度测量中的应用
2018-02-25王树城
王树城
摘要 角度测量是一项基本且重要的测量项目,特别是随着城市的发展,由多个非平行平面组成复杂外墙结构的高层建筑越来越多,此时对于幕墙作业机器人来说就更加如此。本文通过利用计算机视觉技术对二面角进行非接触式测算的研究,提出了一种仅用相机即可完成为幕墙机器人动态测算二面角任务的方法。
【关键词】计算机视觉 二面角测算 幕墙机器人 图像处理
随着高层建筑的涌现,越来越多的幕墙工作机器人被研发和使用。这类机器人在作业时需要在平滑的玻璃上移动,也需要翻越由不同玻璃平面形成的二面夹角,因此就对二面角的非接触、实时测量提出了较高的要求。而随着计算机和CCD相机性能的提高,计算机视觉开始在距离测量、空间运动分析等领域得到广泛应用。计算机视觉测量有非接触性、实时性、动态性、实现简单、测量范围大等优点,非常适合应用在机器人上。本文提出一种基于计算机视觉的幕墙二面角测算方法,解决的是玻璃幕墙机器人在越障时,对所翻越二面角的测量问题。
1 相机准备、玻璃幕墙处理和图像采集
使用固定焦距的相机和一块相机参数标定板(例如黑白棋盘格标定板)对相机进行标定(例如“张正友标定法”),获取相机的内部参数矩阵K及畸变系数Kl、K2、K3、Pl. P2;
对玻璃框进行上色处理,并控制机器人上的云台用相机从任意方向对需要进行测量的夹角部位拍摄一张彩色图像,要求拍摄的图像完整包含夹角部位;
2 用OpenCV视觉库做初步图像处理
首先利用上步中获取的相机内部参数矩阵及畸变系数对所拍摄的图像进行校正;然后将所摄图像应用OpenCV从R(红)G(绿)B(蓝)颜色空间变换至H(色相)S(饱和度)V(色调)颜色空间,并进行直方图均衡化,以便于后续处理。“均衡化”是指对图像中像素个数多的灰度级进行展宽,而对图像中像素个数少的灰度级进行压缩,从而扩展像原取值的动态范围,增强了对比度和灰度色调的变化,有利于后面的识别。
3 颜色识别及图像二值化
将上一步所得图像进行H、S、V三通道分离,并根据与玻璃框颜色对应的H通道的阈值将图像二值化。所述阈值用于从H通道划定H值对应的区间,该区间以内设为白色,以外则设为黑色,或者反过来设置颜色,以便于识别出玻璃框。这里把H值看成一个连续数集,随着H值的变化,对应的颜色也在变化,所以识别颜色,就是从中一段一段地取区间出来。换种说法,这些阈值相当于是为了取出特定颜色而通过实验得来的一些区间端点值。
4 图像的滤波和形态学操作
对上一步已识别出玻璃框的二值图像进行中值滤波及高斯滤波的图像预处理操作,以减弱由图像传输、编解码和传感器结构造成的噪声。之后可对降噪后的图像进行开操作、闭操作和膨胀的形态学处理,以达到减小无关物干扰和增强拟合精度的目的。
5 过滤出需要的目标
在经过形态学处理的二值图中提取所有玻璃框的完整轮廓。接着便用最小包围矩形去拟合所得轮廓,并从结果中去掉非玻璃框的轮廓对应的矩形。
6 求算成角两玻璃平面上的灭点坐标
将上一步中筛选出的矩形輪廓均根据四角点坐标判断出方向,从而进一步筛选出长边垂直于成角两平面交线的矩形。然后求算2N个筛选出的最小包围矩形的、与最小包围矩形长边平行的对称轴的直线方程,并按照所在的玻璃平面分成两类,各自求解出(N*(N-1))/2个灭点坐标。所述对称轴是指各矩形轮廓自身的对称轴,就是过各矩形两短边中点的那条直线。所述对称轴对应的矩形都有质心,质心在相机成像平面上都有对应坐标,将各质心的横纵坐标分别排序,之后分别求相邻两项的差值,由于这些矩形分别处于两个玻璃平面,而在同一玻璃平面的矩形质心坐标差较小,可据此分类。
7 精确灭点坐标及夹角的求算
采取最小二乘法,利用上一步得到的两类一共N* (N-l)个灭点坐标,在两个玻璃面板上分别拟合出一个更精确的灭点坐标。这是因为一段窗框对应一个矩形,一个矩形对应一根对称轴直线,则两根对称轴直线可确定此玻璃面上的一个灭点,两两相求就可得此面上的(N*(N-1))/2个灭点坐标。
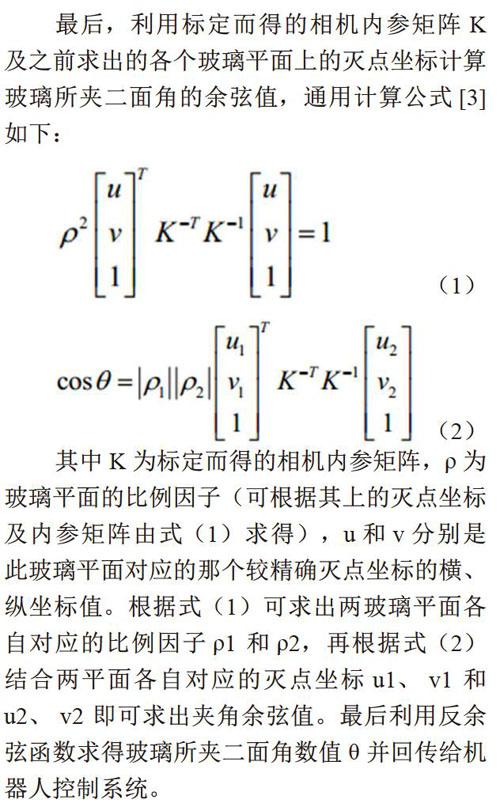
最后,利用标定而得的相机内参矩阵K及之前求出的各个玻璃平面上的灭点坐标计算玻璃所夹二面角的余弦值,通用计算公式[3]如下:
其中K为标定而得的相机内参矩阵,p为玻璃平面的比例因子(可根据其上的灭点坐标及内参矩阵由式(1)求得),u和v分别是此玻璃平面对应的那个较精确灭点坐标的横、纵坐标值。根据式(1)可求出两玻璃平面各自对应的比例因子pl和p2,再根据式(2)结合两平面各自对应的灭点坐标ul、vl和u2、v2即可求出夹角余弦值。最后利用反余弦函数求得玻璃所夹二面角数值θ并回传给机器人控制系统。
8 实验结果与讨论
实验中,在使用电子量角器多次测量取平均值后,得到所测玻璃二面角的真实值为90 021 0。在光照均匀的条件下,按照本文提出的方法测出了多组角度值,其中误差最大的一组为5.31%,最小的一组仅为0.49%。可见,本方法在相当程度上解决了方便、灵活和稳定地测量玻璃二面角的问题,为需要使用二面角角度工作的相应机器人(例如玻璃幕墙清洗机器人等)的研发提供了技术参考。
参考文献
[1] Zhengyou Zhang.A Flexible NewTechnique for Camera Calibration[R]. Microsoft Corporation: TechnicalReport,MSR-TR-98-71,1998.
[2]陶旺林,卢选民,刘李娟,单长,基于OpenCV的非线性图像畸变校正研究[J].现代电子技术,2011,34 (12):117-120.
[3]王德麾,袁中凡,樊庆文,基于计算机视觉的平面角度测量方法[J].西南交通大学学报,2010,45 (05): 775-779+793.
