一种具有多模式切换的货物搬运助力车的设计
2018-02-25卢杰倪中原张义凯张丰
卢杰 倪中原 张义凯 张丰


摘要 针对现有市场上的载运车模式单一、效率低、功能少等缺点,本项目设计了一款可以切换多种工作模式以适应不同搬运环境下的要求的助力车,以实现降低人的劳动强度,提高人的劳动效率的目标。作品通过将皮带轮、锥齿轮、直齿轮、平面螺纹盘、弹簧插销的创新结合,实现了将货物升降,平地运输以及爬楼运输三大功能结合在一起,实现了适应不同的货物搬运情况。
【关键词】助力人工 自动升降 楼梯攀爬
随着人们生活水平的提高,对送货上门服务及长途搬家服务的需求急长,但快递员或者搬家公司在派送大件物品,例如:洗衣机、冰箱等较大、较沉的家电时,一般需要经过装车.长途运输.卸货,平地短距離搬运,爬楼搬运等过程。
其中在装货上车、卸货下车以及送货上楼过程中仍采用人工或者比较笨重的叉车等方式作业,费时费力,极为不便,远不能满足当今时代的需求。
1 助力车的机构设计
针对搬运过程中不同环境下的要求,本货物搬运助力车应满足如下要求:
(1)在卸货时候助力车具有可自动升降的载物平台辅助人工卸货。
(2)在平地运输中要有动力辅助平地运输行走。
(3)可以应对楼梯等台阶普通运输车无法使用的环境.保证对人的辅助助力。
根据以上的使用要求,具有多种模式的货物搬运助力车的整体模型如图1所示。
1.1 滚珠丝杠升降机构
滚珠丝杠升降机构三维视图和机构简图如图2、图3所示。
滚珠丝杠升降机构主要由1滚珠丝杠、2直线导轨、3置物架组成。动力有电机提供,经过传动机构传输到丝杠,使l滚珠丝杠呈旋转运动来带动3置物架上下直线运动,2直线导轨起到限制运动方向,防止置物架旋转。通过控制电机正反转实现置物架的升降功能。
1.2 传动与模式转换齿轮机构设计
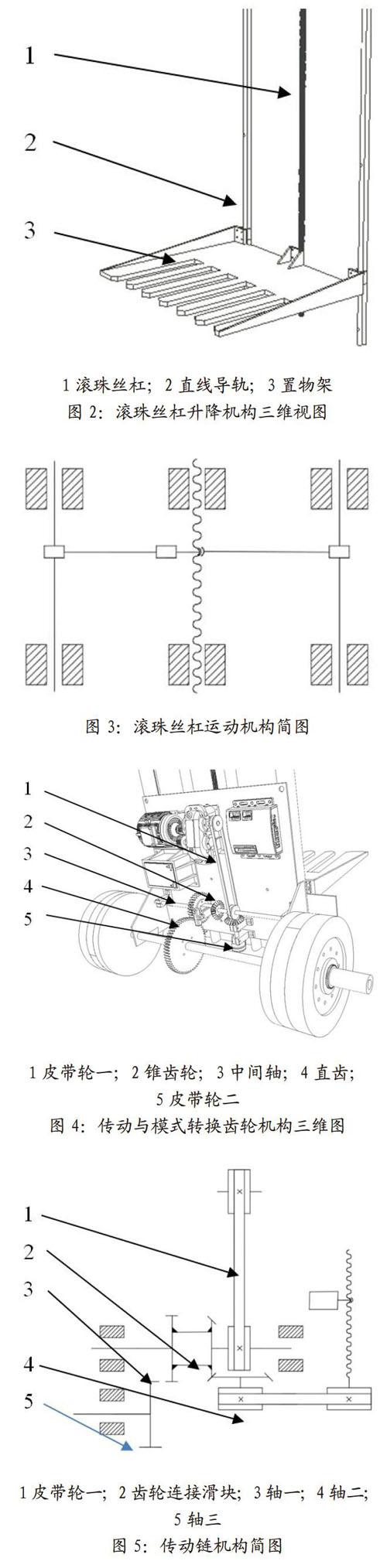
传动与模式转换齿轮机构的三维视图如图4所示。
由于本装置动力由一个电机提供,所以为实现多种模式切换而设计了此传动线路电机输出的旋转运动经减速器减速依靠1皮带轮传递到4中间轴上,4中间轴上装有依靠法兰连接的直齿轮与锥齿轮,通过控制不同齿轮啮合实现不同的功能其运动机构简图如图5。
来自电机的动力带动1,皮带轮转动,将动力传输至3轴一。通过拨动2在3轴一上的位置可以控制其与不同的齿轮的啮合来达到切换运动链的目的。当2与5轴三上的直齿轮啮合时,为将电机动力传递到车轮起到行进目的,当2与4轴二上的锥齿轮啮合时起到将动力传递到前面滚珠丝杠升降机构中起到升降功能。
1.3 模式转换功能齿轮拔叉的设计
拨叉结构的三维视图如图6所示。
3,拨叉外壳表面开有可以滑动的滑槽以及插销孔,拨叉与齿轮固连滑块连接可以在轴上滑动与左右齿轮啮合,1插销与3拨叉外壳上的插销孔以及复位弹簧实现拨叉左右位置的限位
1.4 变径轮的结构设计
变径轮的三维视图如图7所示。
当来自电机的动力传到车轮轴,在平地运输时拨动3双向离合器与4外轮内齿相连将动力传输到外轮上,此时内轮跟随外轮一起转动实现平地运动,
当需要爬楼功能时拨动3双向离合器与2,内轮内齿啮合带动内轮转动,内轮上的螺纹盘的旋转运动将会带动1叶轮径向张开运动,实现由平地运动到爬楼运动轮形态转变。
2 货物搬运助力车的3种功能
如图8所示。
(1)货物升降:电机输出动力传输给螺杆螺母升降机构,从而实现装卸货功能。
(2)平地搬运:将电机输出动力传输给车轮,以辅助人推行小车。
(3)载物爬楼:通过电机动力实现车轮变径以辅助人工爬楼运输。
4 总结
本项目针对目前在市场载运搬运车的一些问题,而创新设计了一款助力车集货物升降,平地运输以及爬楼运输为一体的货物搬运助力车,满足了人们在货物搬运过程中的各种需求。具有良好的实用价值与应用前景
参考文献
[1]濮良贵,纪名刚,机械设计.(第八版)[M].北京:高等教育出版社,2006.
[2]唐增宝,常建娥.机械设计课程设计.(第四版)[M].北京:华中科技大学出版社.2012.
[3]闻邦椿.机械设计手册(第五版)[M].北京:机械工业出版社,2010.
[4]成大先,机械设计手册.(第一版)[M],北京:化学工业出版社,2004.
[5]梁顺可,锥齿轮升降机滚珠丝杠的模态分析[J].机械制造,2018.
[6]佳木斯大学.一种往复式三角卡盘自动定位装置:CN201220455049.2[P].2013-03-13.
[7]王春玲,常山,张祥等,齿式双向离合器的工作机理仿真研究[J].机械传动,2010.
