5MW中压直驱风电变流器控制系统设计
2018-02-13邓孝祥戴超凡
邓孝祥 戴超凡


摘 要:针对5MW永磁直驱风力发电机的特点,详细研究了二极管中点钳位式(neutral point clamped,NPC)三电平中压全功率变流器的控制系统、主回路设计、定子磁链估算与不连续脉冲调制discontinuous pulse-width modulation,DPWM)。网侧变流器采用电网电压定向和空间电压脉冲宽度调制(space voltage pulse width modulation,SVPWM)策略,机侧变流器采用转子磁场定向和DPWM策略,并基于低通滤波器补偿的方法进行定子磁链的幅值及角度的估算。热仿真软件结果表明:网侧开关频率为1.55kHz时,IGBT结温与温升满足器件设计规范;25kW 样机实验结果表明,采用该文所提调制策略和定子磁链估算方法,并网电流谐波含量能够满足国标要求,转子位置估计误差小,具有较好的稳态性能和转矩动态响应性能,能够很好满足系统控制要求。
关键词:中压三电平变流器;矢量控制;断续脉宽调制
DOI:10.15938/j.jhust.2018.06.013
中图分类号: TM614
文献标志码: A
文章编号: 1007-2683(2018)06-0070-07
Abstract:The diode three-level neutral-point-clamped3L-NPC) converter with full power is a promising multilevel topology in the application of wind power generation system. In view of the 5MW direct-drive wind power generator with permanent magnet this paper investigated the control system main loop parameters stator flux estimation and discontinuous pulse-width modulationDPWM) of the full-power 3L-NPC converter. The grid-side converter emploied the grid voltage oriented control and space voltage pulse width modulationSVPWM) strategy while the rotor field orientated vector control and DPWM strategy were adopted in the rotor-side converter. In addition low-pass-filter-compensation-integratorLPFCI) based rotor flux position estimation control method is proposed. The result of thermal simulation indicates that when the switching frequency of the grid-side converter is 1.55kHz the junction temperature and temperature rise of IGBT conform with design regulation. Furthermore the 25kw experimental prototype illustrates that based on the technique and stator flux estimation as mentioned in the paper the harmonics content is quanlified with international standards,and the system has small rotor position estimation error excellent steady-state performance and torque dynamic response meeting with systematic control requirements.
Keywords:medium voltage three level converter; vector control; discontinuous pulse-width modulation
0 引 言
與陆上风力发电相比,海上的风资源更好,离岸10km的海上风速是沿岸陆上风速的1.25倍,且风机布置在海上,风机布局可以更加灵活,因此海上风电与大功率风电变流器是风电的发展趋势[1]。目前国内外均已经开始5MW以及以上功率等级海上风电变流器研究;其中ABB公司已经在国内外小批量使用,采用二极管中点钳位式(NPC)三电平拓扑与中压系统(3000VAC);国内一些厂家如阳光电源和国电南瑞等企业也进行了试验样机的研制与样机的地面对托试验。由于国外机型成本较高,因此5MW海上风电变流器具备很大的进口替代优势。综合国内外厂家的变流器设计参数,均采用了中压型NPC三电平拓扑[2-3],设计难点为中性点电压平衡控制、内管电压不钳位抑制、谐波与热损耗平衡等问题。本文设计的5MW直驱型海上风电变流器,采用3000VAC中压方案[4-5],直流母线电压5200V;采用了中压型NPC三电平拓扑结构;机侧PWM整流器采用SVPWM控制,网侧PWM整流器采用DPWM;并采用动态平衡电阻解决内管电压不钳位问题。
1 三电平中压风电变流器总体方案设计
1.1 系统总体方案
系统设计方案采用“永磁同步发电机+NPC三电平双PWM变流器”方案。5MW变流器通过两个2.5MW变流器并联形成,每个变流器的网侧和机侧变流器均由三相NPC三电平PWM变流器构成,机侧变流器根据风机主控要求控制电机转速(转矩),从而实现风能的最大功率跟踪;网侧变流器稳定直流母线电压、控制电网功率因数和并网电能质量。机侧变流器与电机之间连接du/dt滤波器,对于差模du/dt,采用LCR波器来抑制,针对电机的共模du/dt,采用在输出侧接共模抑制磁环的方式抑制。网侧变流器通过LCL滤波器来抑制网侧并网电流谐波。机侧变流器和网侧变流器通过中间直流电容进行过渡,网侧变流器经过断路器之后,并入3kV电网。系统拓扑结构图如图1所示。
1.2 控制系统方案设计
两个2.5MW的变流器具有完全相同的结构和性能,各自独立控制并通过CAN总线实现控制层面的协调。变流器各个环节的信息采集、电压电流调节、事件记录和通信等功能,由以数字信号处理器(digital signal processing DSP)TMS320F28377D和现场可编程门阵列(field programmable gate array,FPGA) XC6SLX25为控制核心的控制系统实现[6]。
DSP主要实现工作时序控制、指令给定、运行控制、锁相环算法、网侧矢量控制算法、机侧转子磁场定向控制算法、定子磁链估算算法、PWM驱动信号的调制算法、故障判断与处理、通讯等功能。DSP的CPU1负责与FPGA通讯实时数据交互、通讯、工作时序和机侧变流器控制,并将采样数据和故障信息与CPU2交互[7];CPU2负责网侧并网控制算法,两个CPU核之间通过IPC总线交互数据。FPGA主要实现数字AD采样控制,I/O口逻辑处理、故障输入信号处理、脉冲信号封锁逻辑、复位逻辑等。DSP与FPGA通过FPGA自建的双口RAM实现采样数据和故障数据交互,系统结构如图2所示。
2 NPC三电平内管电压钳位设计与计算
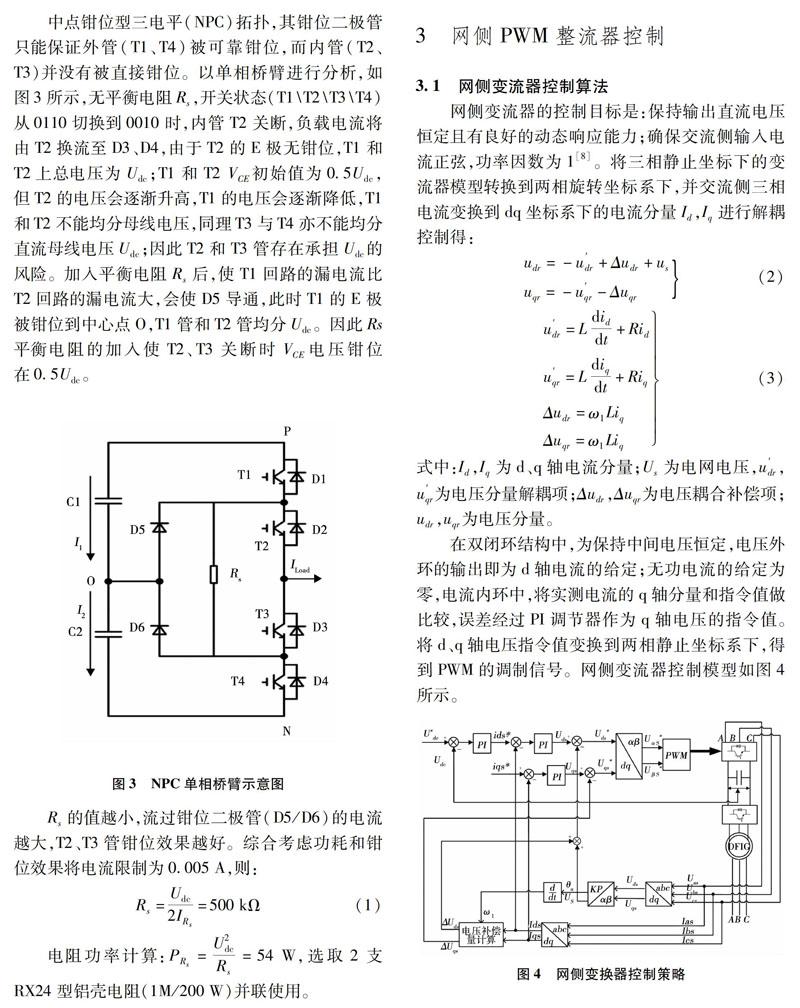
中点钳位型三电平(NPC)拓扑,其钳位二极管只能保证外管(T1、T4)被可靠钳位,而内管(T2、T3)并没有被直接钳位。以单相桥臂进行分析,如图3所示,无平衡电阻Rs,开关状态(T1\\T2\\T3\\T4)从0110切换到0010时,内管T2关断,负载电流将由T2换流至D3、D4,由于T2的E极无钳位,T1和T2上总电压为Udc;T1和T2 VCE初始值为0.5Udc,但T2的电压会逐渐升高,T1的电压会逐渐降低,T1和T2不能均分母线电压,同理T3与T4亦不能均分直流母线电压Udc;因此T2和T3管存在承担Udc的风险。加入平衡电阻Rs后,使T1回路的漏电流比T2回路的漏电流大,会使D5导通,此时T1的E极被钳位到中心点O,T1管和T2管均分Udc。因此Rs平衡电阻的加入使T2、T3关断时VCE电压钳位在0.5Udc。
Rs的值越小,流过钳位二极管(D5/D6)的电流越大,T2、T3管钳位效果越好。综合考虑功耗和钳位效果将电流限制为0.005A,则:
Rs=Udc2IRs=500kΩ(1)
电阻功率计算:PRs=U2dcRs=54W,选取2支RX24型铝壳电阻(1M/200W)并联使用。
3 网侧PWM整流器控制
3.1 网侧变流器控制算法
网侧变流器的控制目标是:保持输出直流电压恒定且有良好的动态响应能力;确保交流侧输入电流正弦,功率因数为1[8]。将三相静止坐标下的变流器模型转换到两相旋转坐标系下,并交流侧三相电流变换到dq坐标系下的电流分量Id,Iq进行解耦控制得:
在双闭环结构中,为保持中间电压恒定,电压外环的输出即为d轴电流的给定;无功电流的给定为零,电流内环中,将实测电流的q轴分量和指令值做比较,误差经过PI调节器作为q轴电压的指令值。将d、q轴电压指令值变换到两相静止坐标系下,得到PWM的调制信号。网侧变流器控制模型如图4所示。
3.2 网侧变流器PWM调制方式
断续脉宽调制策略(DPWM)是SVPWM调制方式的一种改进,在相同开关频率下,可以降低功率器件的开关损耗。在一个 PWM 开关周期内同时采用 T0 和 T7,对应着连续空间矢量 PWM 方式(continuous space voltage pulse amplitude modulation CSVPWM);如果在一个 PWM 开关周期内只采用 T0 或 T7 则对应不连续 PWM 方式(DSVPWM)。DPWM 方式根据T0在不同扇区的取值不同,可以得到不同的DSVPWM调制可分为[9-10]: DPWMMAX、DPWMMIN、DPWM0、DPWM1和DPWM2。DPWM1 开关状态保持不变的区间刚好位于波峰和波谷处,如果此时变流器所带负载的功率因数为1[11] 则负载电流的相位与逆变器相电压基波相位一致,在负载电流最大的共120°范围内开关状态刚好保持不变,这样可使开关损耗降低至最小[12]。DPWM1可将开关损耗降低为SVPWM的0.5倍。在相同的开关损耗下,网测变流器开关频率可提高2倍,因此设置为1.55kHz。
机、网侧变流器IGBT均选用英飞凌公司FZ1200R45KL3_B5,钳位二极管选用英飞凌公司DD1200S45KL3_B5。网侧变流器在开关频率f=750Hz,输出频率50Hz,调制度M=0.94,中间直流电压为5200V,电流为额定电流575.5A条件下,采用英飞凌IGBT热模拟软件Infineon IPOSIM[13],仿真计算得到器件的平均功耗及温升如表1(a)所示。仿真的结温为110.6℃小于125℃(器件极限结温),但在25kW样机中实验过程中采用750Hz开关频率情况下,并网总谐波为11%,无法满足IEEE 519—1992[14]的并網标准要求。
依照相同的计算方法,在调制算法采用DPWM1,开关频率为1.55kHz和单位功率因数下,英飞凌功率器件平均功率及温升如表1(b)所示。可以看出在调制算法采用DPWM1,开关频率为1.55kHz条件下,计算出的结温为112.1℃小于125℃(器件极限结温)。
4 转子侧变流器的控制
4.1 机侧变流器控制算法
机侧PWM变流器采用基于转子磁场定向的矢量控制,采用零d轴电流控制,即isd= 0,则电磁转矩方程变为[15]:
4.2 基于低通滤波器补偿的转子磁链位置观测
忽略定子电阻,可得采用零d轴电流控制的永磁同步电机处于发电工况时的矢量图如图6所示[16-17],其中Is为定子电流矢量,Us为定子电压矢量,ψf为转子磁链矢量,ψs为定子磁链矢量,δ为功角。定子磁链与转子磁链间的功角δ只与电流和电机参数有关,补偿功角tanδ=Lqiqψf,即可得到转子磁链位置θe=θs+δ。
基于扩展反电势估算的无传感器零d轴电流矢量控制重点在于转子磁链位置的估算,通过反电势:
采用带饱和反馈环节积分法得到定子磁链ψα,ψβ,限幅值L=ψs=L2qi2q+ψ2f,得到定子磁链位置tanθs=ψβψα。
定子磁链可通过对反电势信号的积分得到,但纯积分器输出信号会产生较大直流分量甚至引起积分器饱和,因此采用一个截止频率较低的低通滤波器(等效为纯积分器与一阶高通滤波器组合)来代替纯积分器,但低通滤波器的引入不可避免的带来了幅值和相位误差。因此采用基于低通滤波器补偿的方法(LPFCI)进行定子磁链的幅值及角度的估算[18-19],其输入输出关系如下式所示。其中:ωc为低通滤波器的截止频率;ωe为永磁同步电机电角频率;ωeest表示估算量;s为拉普拉斯算子。
低通滤波补偿积分器可对低通滤波器引入的幅值和相角误差进行补偿,使其不存在饱和等问题,其原理框圖如图7所示。低通滤波器与低通滤波补偿积分器的低通滤波器合用一个,同时采用硬件低通滤波器实现,避免了滤波器数字化实现造成的性能影响[20]。
5 实验验证
为了对控制系统进行验证,采用25kW直驱永磁风力发电实验平台对控制系统硬件和软件进行验证,实验平台额定参数如表2。
实验条件:中间直流电压600V,网侧线电压380V,转速80r/min,机侧开关频率750Hz,网侧开关频率1.55kHz,调制方式SVPWM;转矩给定为0~400N·m,400~800N·m。转矩突变测试实验波形如图8、9所示。通道1:机侧相电压Uab,通道4:机侧相电流Ia。在突加、突减转矩给定指令(对应定子电流指令突加、突减)时,由定子电流Ia波形可见定子电流均能很好的跟踪转矩指令的变化。
网侧开关频率设计为1.55kHz,调制方式为DPWM1调制,机侧开关频率750Hz,调制方式为SVPWM。其实验波形如图10所示,通道1:网侧A相电流,通道2:机侧ab相线电压,通道3:机侧a相电流,通道4:网侧ab相线电压。对比网侧a相PWM波和a相电流,网侧IGBT不动作区域在a相电流最大处,与DPWM1的单位功率因数下运行相一致。
谐波含量如表3和4所示,其中网测变流器总谐波为3.63%,机测变流器为3.66%,均能够满足谐波要求。
6 结 论
针对5MW直驱风电变流器设计了三电平 NPC拓扑的中压风电变流器,并在25kW永磁同步电机实验平台上对控制系统硬件设计、控制算法和拓扑结构等进行了验证。提出了基于双核DSP和FPGA的中压风电变流器控制系统;基于均衡电阻的NPC拓扑内管电压钳位的解决方案;基于低通滤波器补偿的转子磁链位置观测方法以实现了转子磁链定向。热仿真软件结果表明:网侧开关频率为1.55kHz时,IGBT结温与温升满足器件设计规范;25kW样机实验结果表明:采用该控制系统、调制策略和定子磁链估算方法,网测变流器总谐波为3.63%,机测变流器为3.66%,永磁同步电机转子位置估计误差小,并且具有较好的稳态性能和转矩动态响应性能,能够很好满足直驱风力发电系统永磁同步电机控制要求。
参 考 文 献:
[1] 吴家梁,李成峰. 海上风力发电技术[M].北京:化学工业版社,2010:24-30.
[2] 边石雷,王勇,蔡旭. 中压风电变流器的研究和实现[J].电源学报,2012(6):14-18.
[3] 王志新,吴杰,徐烈,等. 大型海上风电场并网VSC-HVDC变流器关键技术[J]. 中国电机工程学报,2013,(19):14-27.
[4] 姚骏,夏先锋,陈西寅,等. 风电并网用全功率变流器谐波电流抑制研究[J]. 中国电机工程学报,2012(16):17-25.
[5] 李爽,王志新,王国强,等. 三电平海上风电柔性直流输电变流器的PID神经网络滑模控制[J].中国电机工程学报,2012,(04):20-29.
[6] 郭巍,肖遥,孙永佳. 基于DSP与FPGA的变流器通用控制平台研究[J].电气传动,2014(2):22-26.
[7] 郭巍,杨婷,王磊. 基于IGBT的微电网解并列控制系统研究[J].电气应用,2016(11):28-33.
[8] 刘其辉. 变速恒频风力发电系统运行与控制研究[D].杭州:浙江大学,2005.
[9] 任康乐,张兴,王付胜,等. 中压三电平并网逆变器断续脉宽调制策略及其输出滤波器优化设计[J]. 中国电机工程学报,2015(17):4494-4504.
[10]杨勇,阮毅,吴国祥,等. 基于DPWM1的无差拍解耦控制的三相并网逆变器[J]. 电工技术学报,2010(10):101-107.
[11]陈根,王勇,蔡旭. 兆瓦级中压风电变流器的新型串联混合三电平NPC拓撲[J]. 中国电机工程学报,2013(9):48-54.
[12]张兴,谢韦伟,王付胜,等. 三电平断续脉宽调制策略的研究[J]. 电力电子技术,2013(10):4-6.
[13]Infineon Technologies AG. Dimensioning program IPOSIM for loss and thermal calculation of Infineon IGBT modules [EB/OL].[2013-08-21].http://www.infineon.com/cms/en/product/channel.html?channel=ff80808112ab681d0112ab69e66f0362
[14]IEEE 519—1992.电源系统的谐波控制的推荐实施规范和要求[S].
[15]ZHOU Keliang WANG D. Digital Repetitive Controlled Three-phase PWM Rectifier[J]. IEEE Transactions on Power Electronics 2003 18(1): 309-316
[16]年珩,李嘉文,万中奇. 基于参数在线辨识的永磁风力发电机无位置传感器控制技术[J]. 中国电机工程学报,2012(12):146-154.
[17]贺艳晖,王跃,吴金龙,等. 直驱式风力发电机无位置传感器矢量控制[J]. 电机与控制学报,2010(3):31-38+44.
[18]唐芬,金新民,姜久春,等. 兆瓦级直驱型永磁风力发电机无位置传感器控制[J]. 电工技术学报,2011(4):19-25.
[19]唐芬,金新民,周啸,等. 基于低通滤波补偿积分器的直驱型永磁风力发电机无位置传感器控制[J].北京交通大学学报,2011(5):94-100.
[20]师楠,朱显辉. 风电并网的频率控制问题[J]. 哈尔滨理工大学学报,2012(2):84-88.
(编辑:温泽宇)
