公务船阵位机动计算模型研究∗
2018-02-07童雪娟冯明奎
童雪娟 冯明奎 陈 建
(1.公安海警学院 宁波 315801)(2.广东省海警第二支队 汕头 515900)
1 引言
阵位机动是公务船艇在海上执勤和训练时常用的一种机动方式。公务船艇为了执勤执法活动的顺利展开,需要占领目标船的某一有利阵位;执勤船艇编队在航渡时,担任警戒任务的船艇需要占领基准船的某一阵位,组成符合战术要求的警戒队形;如何在海上某一特定区域进行侦查、搜索、巡逻中占领有利阵位或与指挥艇保持阵位,传统的做法是在舰操图上人工标绘求解。这要求船艇绘算人员具备精湛的技能以及良好的心理素质,才能快速准确绘算出正确结果。但实际情况中,由于海上环境的复杂性、多变性,尤其是在气象条件恶劣的情况下,导致绘算时间长、精度低,难以保证实时执勤的需要。随着计算机技术和航海技术的融合,建立机动数学模型,从雷达上采集目标船和本船的运动要素数据,用计算机实现自动绘算,是一个解决之道。
2 人工标绘法
占领阵位的具体问题可以描述为:已知目标船T的航向Ct,航速Vt,机动开始时T船的方位为B1,距离为D1,机动船(本船)以航速Vo占领目标船T舷角Qt,距离D2的阵位。求机动船占领新阵位时所用的航向Co及所需时间t。根据雷达标绘的基本原理,本船真运动矢量等于目标船真运动矢量与目标船相对运动负矢量之和,给定任意两个矢量,就可以用作图法求取一个未知矢量[1]。只需确定目标船初始的相对位置T1和机动船占领新阵位后目标船的新相对位置T2,由T1位置向T2位置作射线,该射线即为目标船相对于机动船的相对运动线,已知目标船的速度大小、方向,相对速度的方向,机动船的速度大小,即可求得机动船的速度方向即为所需的航向Co,以及相对速度的大小,再量得目标两位置(T1T2)间的相对航程即可算出所需的航行时间t。
例O船测得T船航向Ct=300°.0,航速Vt=15kn。机动开始时T船的方位B1=240°.0,距离D1=80cab。O船以航速Vo=24kn占领T船舷角Qt=100°左,距离D2=40Cab的阵位。求占领阵位的航向Co及机动所需时间t。在舰操图上作图解算,如图1所示,具体步骤为:
1)将O船置于舰操图中心,根据B1,D1标出T船的初始位置T1。再根据Qt及D2标出占领阵位时T2的位置,连接T1T2得相对航向线;
2)作速度三角形求占领阵位的航向Co。
速度比例尺3:1,过O点作目标船T的速度矢量线OA,过A点作T1T2的平行线AA’,以O为圆心,以Vo为半径,画弧交AA’于B点,连接OB,OB即为O船速度矢量,其方向即为O船占领阵位航向;
3)BA则为相对速度矢量Vr,机动所需时间t=T1T2/Vr。
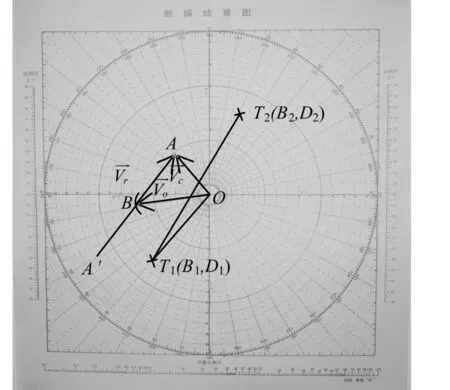
图1 占领阵位人工标绘
3 数学模型
1)问题的分析
已知T船的航向Ct,航速Vt,机动开始时T船的方位、O船测得的初始阵位及要占领的新阵位B2、D2或Qt、D2,O 船占领阵位机动时所用航速为 Vo,求O船的航向Co,所用时间t。由占领阵位机动的原理可得,要求得Co,t只需确定T船的始末位置,再确定相对航向线,然后根据几何学求出Co,t。
2)占领阵位可能性分析
当机动船的航速大于目标船的航速(Vo>Vt),可以占领目标船的任何阵位,但当机动船的航速不超过目标船的航速时(Vo≤Vt),机动船所能占领的范围是一定的[2]。下面讨论Vo≤Vt时可占领阵位的范围:假设目标船T航向为Ct,航速为Vt,机动船(本船)航速为Vo,求机动船能占领目标船T的范围。机动船O点置于直角坐标原点,目标船初始位置为T1,以T1为圆心,以 Vo为半径作圆;过 T1作目标船速度负矢量Vt,从Vt负矢量端点作Vo速度圆的切线AB、AC,则∠BAC所包含(小于180°)的扇面就是所求的可占领阵位范围,如图2所示。从图中可以看出,∠T1AB=∠T1AC=Qc,Qc=arcsin(Vo/Vt)。机动船所能占领目标船的阵位范围是两倍的Qc组成的扇面。
3)模型的建立
将机动船O点置于直角坐标原点,标绘初始阵位T1、拟占领阵位点T2,如图3所示。
Bt1=B1+180,其中Bt1>360时,需要减去360
Bt2=B2+180,其中Bt2≥360时,需要减去360
T1= (D1sin B1,D1cos B1),
T2= (D2sin B2,D2cos B2);
其中B2已知或Qt已知;
若 Qt已知,则 B2=Ct+Qt+180,其中B2>360时,需要减去360。
由几何图形可知相对航向线T1T2的斜率:K=(D1cos Bt1-D2cos Bt2)/(D1sin Bt1-D2sin Bt2)。
相对航向Cr1=90-arctan k,这个公式只能确定相对航向在一、四象限的大小,而当相对航向在二、三象限时,即 D2cos Bt2<D1cos Bt1且0<Cr1<90时 ,Cr2=180+Ct1;D2cos Bt2>D1cos Bt1且90<Cr1<180时,Cr2=180+Ct1。
P为Cr和Ct的夹角 P=|Cr-Ct|,
X为Co和Cr的夹角 X=arcsin(Vt/Vo×sin P),
由几何图形可得机动船的航向Co=Cr+X+180,
Vr为相对速度

s为相对航程

t为所用时间t=s/Vr×60。
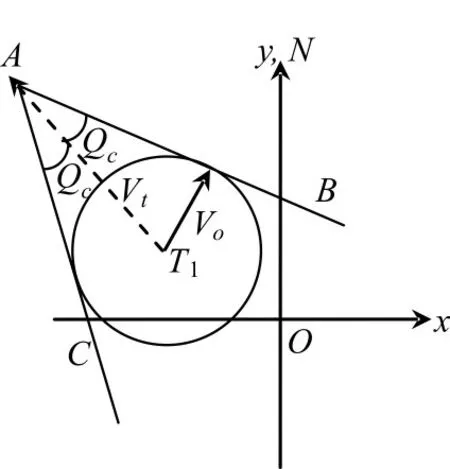
图2 占领阵位可能性分析

图3 速度矢量关系
船艇阵位机动中的变换机动是指机动舰由原来的阵位变换到同一目标舰的另一新阵位点的机动。保持阵位机动是指目标舰转向以后,机动舰需要保持原来的阵位而进行的机动。这两种方法与占领阵位在本质上是一致的[3]。因此,上述数学模型同样适用于变换阵位机动与保持阵位机动。
4 编程实现
根据计算模型,利用MatLab语言编程实现占领阵位自动绘算,软件功能包括六个模块:比例尺选择,机动类型选择,参数输入,自动解算、分步解算、结果输出。软件界面如图4所示。用户在打开软件后,首先要对机动的类型进行选择,并根据不同的机动方式输入数据,选择合适的比例尺,计算机自动进行绘算,并输出绘算结果,结果包括数据和图形,也可根据需要进行分步解算。其中比例尺和输入参数没有先后顺序。
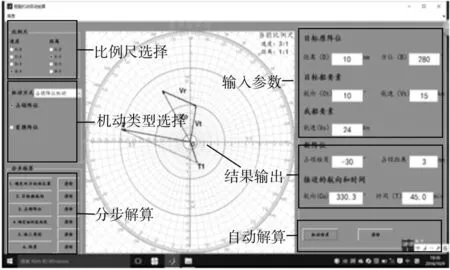
图4 自动绘算界面
比例尺模块分为速度比例尺与距离比例尺,可以根据数据的大小,由人工选择,选择不同的比例尺,本系统提供四种比例尺:2:1、1:1、1:2、1:3。
机动类型选择模块提供了三种占领阵位方式:占领阵位机动、变换阵位机动、保持阵位机动。根据任务需求选择机动方式,当选定一种机动方式后,系统就进入该机动模式,进行该机动方式的绘算。
参数输入模块根据选择的机动方式,由人工输入机动船和目标船的初始数据,计算机判断输入参数是否有效。
自动绘算模块根据计算模型实现占领阵位,变换阵位、保持阵位自动绘算,解算流程如图5所示。
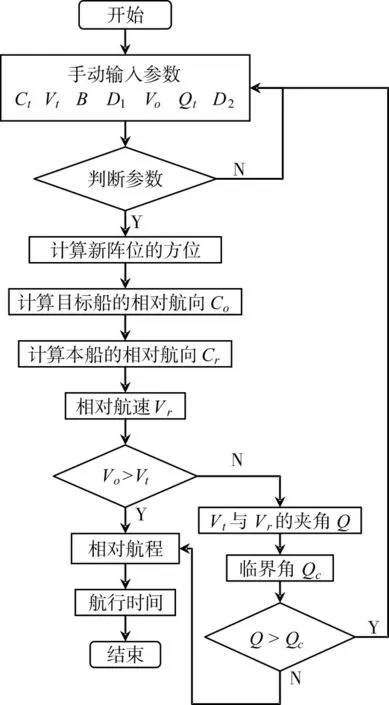
图5 占领阵位自动绘算流程图
分步解算模块是根据图解法的求解过程,把自动绘算分为确定目标船原航向、目标船原阵位、目标需占领阵位、确定相对运动线、做速度三角形五个步骤完成,主要用于教学的需要。
结果输出提供了数据结果和图形结果输出。数据结果是为用户提供相应的数据支持。图形结果是显示自动汇算后所形成的相对三角形等相关图形和参数,让用户更直观地了解,当前船艇与目标之间的位置关系、对峙情况和运动趋势。
5 结语
通过采取50个绘算实例作为样本计算自动绘算时间,得到平均绘算时间为1.2s,远远小于传统的人工舰操图绘算。自动绘算软件具有绘算速度快、绘算精度高的特点。为了方便教学与训练,增加了分步绘算显示与输出功能,有助于学员理解绘算过程。下一步,需要研究雷达数据人工录取实现方法,减少人工输入参数的时间,从而实现绘算完全自动化。
[1]祝建国,翁建军.雷达观测与标绘[M].武汉:武汉理工大学出版社,2010.
[2]赵学军.雷达操作与应用[M].大连:大连海事大学出版社,2015.
[3]王金堂,李永进.舰船战术机动[M].北京:中国人民大学出版社,2014.
[4]周旭.数学建模与仿真[M].北京:国防工业出版社,2003.
[5]古侃.雷达标绘自动化模块算法研究[A].徐惠心.船舶航泊实践研究论文集[C]//广州:中国航海学会,2010:123-127.
[6]黄文雅,童雪娟.海警舰艇接近机动自动绘算的软件设计与实现[J].公安海警学院学报,2015,13(3):76-78.
[7]杨裕浩,张源,田华,等.基于模型的舰艇机动系统设计[J].舰船科学技术,2013,35(8):129-131.
[8]陈亮,杨勤.基于ECDIS的舰船机动智能决策支持系统的研究[J].广州航海高等专科学校学报,2011,19(2):5-7.
[9]李启华,简远.舰船规避低速目标机动计算模型研究[J].广州航海高等专科学校学报,2011,19(2):1-4.
[10]王子明,徐海峰,王宗杰,等.基本战术动作的舰艇作战指挥过程建模[J].舰船科学技术,2012,34(6):91-94.
