基于Exynos 4412的小型移动水质监测系统的设计与实现
2018-02-05曹宏桂
曹宏桂


摘要:针对目前我国水域污染频发这一现状,现有的移动监测设备体积太大且成本高昂,无法在偏远水域普及的问题,文章设计了一套基于Exynos4412的小型水质监测系统,在Linux操作系统下利用3G无线通信技术进行远程数据交互,实现远程遥控。该系统搭载电子罗盘、超声波测障模块、GPS定位等模块实现自主导航,设计了标准的4?20mA标准接口,实现水质5常数(pH、温度、电导率、浊度、溶解氧)的采集,对于突发水域污染的应急处理有一定的实际意义。
关键词:移动水质监测;突发水域污染;嵌入式Linux;Exynos4412
移动水质监测是近代计算机技术和嵌入式技术迅猛发展的结果。比如:Matthew等[1]介绍了一个在高度非结构化环境中的水下监测和测量的新的机器人装置-水文AUV,可以在分布式的传感网络和协作机器人的帮助下实现低功耗的搜索、自主导航和数据采集。Robert等[2]研发了水下机器人并开发了配套的软件,该机器人可以在恶劣的天气和环境条件下完全自动化工作和远程控制,但是成本较高。Shangchao等[3]设计了一种低成本的移动在线监测装置。采用Cortex-A8作为核心处理器,通过GPS获取位置信息,并通过3G无线传输与遥控中心进行通信,实现水质图像及其长距离传输的颜色特征以及污染源的跟踪。Zhu等[4]为解决水质检测手动分析实时性差的问题,采用基于ZigBee的无线传感器网络实现了水质参数的远程探测和实时监控功能。吴宇[5]设计了小型移动水质监测系统,可以实
现视屏辅助避障和3G无线通信。谢欢[6]利用遥感技术获取地表水的颜色资料,然后大面积地对地表水的污染情况进行监测。
综上所述可以发现对于移动水质监测装置的研究现在主要存在的问题是造价昂贵,不够灵活,在突发水域污染的情况下没有溯源能力。
1 系统整体设计
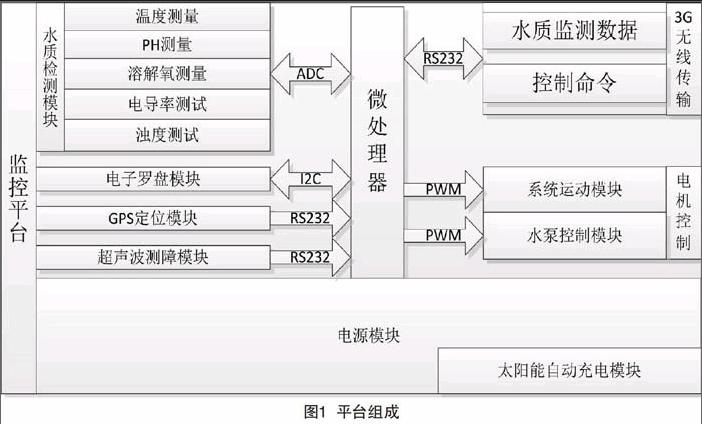
船体上搭载的功能模块包括:太阳能充电板、3G无线通信模块、水质检测模块、GPS定位模块、超声波测障模块、电子罗盘模块。其组成框图如图1所示。
移动平台使用Lmux操作系统,且系统所挂接的模块较多,故选择三星公司生产的Exynos4412微处理器。水质检测模块选择RX71-0.2560D±0.05%精密电阻作为采样电阻,将4?20mA电流转换为0.24?1.2V,实现对温度、PH值、溶解氧量、电导率、浊度等水质参数的采样;电子罗盘模块,选用霍尼韦尔公司推出的3轴数字罗盘HMC5883来测量移动水质监测平台的运动方向,为系统的控制和导航提供基础;GPS定位模块和3G无线传输模块,选用华为的MU609芯片来实现;超声波测障模块,根据声波反射原理测量移动水质监测平台前进方向和两侧是否存在障碍物,本文采用SRF05模块实现;系统运动模块和水泵控制模块,选用常用的L298N搭建驱动电路;电源模块,选用AMS1117系列电压转换芯片实现7V和5V的转换,通过电压转换芯片S5M8767A实现3.3V,1.8V,1.2V,1V等电压的管理,采用CN3722实现锂电池的太阳能智能充电。
2 系统工作流程
由于整个系统搭载的功能模块太多,如果仅仅执行裸机程序难以实现各个模块之间稳定有序的运行,因此本文对开发板移植Linux操作系统,以管理和协调好各项复杂的任务。系统开始工作后,首先初始化各项数据,然后等待监控中心的指令,如果监控中心选择的是手动模式则按照接收到的指令完成水质参数的采集,若接收到的指令为自动导航模式,则根据溯源算法获取的坐标点,自动导航到该点进行采样工作,然后将数据自动传回监控中心,由监控中心计算下一个采样坐标点,依次循环直到到达污染源所在位置,系统工作流程如图2所示。
2.1 水质采样流程
水质采样获取的数据是监控中心进行操作的基础,故水质采样的精确性至关重要,本文设计了8路水质采样通道,当接收到采样命令后,给传感器供电然后延时1分钟让传感器预热达到稳定工作状态,然后依次选通8路模拟开关完成8路模拟水质米样通路的数值彳目息米集。其流程如圖3所示。
2.2 运动控制流程
如图4所示,通过发送PWM信号即可控制小船上的两个直流无刷电机动作,带动移动水质监测平台尾部的螺旋桨产生不同的转速和转向,推动移动水质监测平台实现前进、左转、右转和不同的运动速度。
3 结语
针对目前突发水域污染存在的问题,本设计实现的小型移动水质监测系统,具有体积小、成本低、精度高、可自主导航等特点,可以应用于日常的水域水质巡检,尤其对于突发水域污染的应急处理有一定的实际意义。
[参考文献]
[1JMATTHEWD?JONATHANR?KANEU9etal.AhybridAUVdesignforshallowwaterreefnavigation[C].Barcelona:Proceedingsofthe2005InstituteofElectricalandElectronicEngineers,InternationalConferenceonRoboticsandAutomation,2005(4):2105-2110.[2JROBERTK?ZYGMUNTW,KLESZCZA9etal.Mobilesailingrobotforautomaticestimationoffishdensityandmonitoringwaterquality[J].BioMedicalEngineeringOnline,2013(12):60.
[3JSHANGCHAOD?JIANGY,YUW?etal.Researchonsmallmobilewaterqualityonlinemonitoringdevice[J].InternationalConferenceonControlandAutomation,2013(10):351-356.
[4]WANGZ?WANGQ?HAOX.ThedesignoftheremotewaterqualitymonitoringsystembasedonWSN[C].Nanjing:InternationalConferenceonWirelessCommunications,InstituteofElectricalandElectronicEngineersPress,2009:3612-3615.
[5]吴宇.小型移动水质监测系统的研究[D].杭州:浙江大学,2013.
[6]谢欢.基于遥感的水质监测与时空分析[D].上海:同济大学,2006.endprint
