基于ROBOTXT快递存储车的程序设计
2018-02-05谭宇良吴何畏
谭宇良+吴何畏

摘要:以ROBOTXT为主控制器,结合慧鱼模型,文章采用集选控制的方式组装了一套快递存储车模型。通过程序的设计与调试解决了以下问题:精确定位控制;外召唤信号控制;三轴机械手运动控制;运送控制;传递连续控制。该设备可直接用于各地区,存放快递快捷方便,环保经济且具有较好的社会推广价值。
关键词:慧鱼模型;ROBOTXT;快递;自动控制
1 系统控制程序设计
1.1 系统结构和控制要求
根据系统结构和要求,工作流程可大致分为存入快递和取出快递两个部分。开始工作前会进行复位检测,确保相应元件都在起始位置。
存入快递时,将快递放到存入区域,按下存入开关,在传感器检测到有快递的情况下输送电机正转将快递推到夹取平台,在夹取平台上的传感器检测到快递后,先是输送电机反转回到起始位置,然后机械手动作从原点位置运行至夹取平台并夹住快递存入货位,最后复位到原点。
取出快递时,按下取出按键,用户输入相应信息后机械手从原点位置前往对应货位夹住快递运至传送带,传送带上的传感器响应后机械手放开快递,传送带运转将快递运出。
1.2 ROBO的I/O点确定与分配
由前文中系统分析的结论可知约需4个模拟量、8个开关量的输入和6个开关量的输出。
ROBOTICSTXT控制板可以通过彩色触摸屏轻松控制。内置的蓝牙与WiFi模块提供完美的无线连接方式,可以有许多应用。控制板包含众多接口,其中的USB端口可以连接诸如慧鱼USB摄像头之类的设备。拥有功能强大的处理器,大容量的RAM和Flash存储空间,和Linux操作系统,保证了ROBOTICSTXT控制板极高的性能,用以控制各种慧鱼ROBOTICS模型。集成的MicroSD卡插槽可以提供额外的存储空间。控制板的5个面都有插槽,同时整体尺寸十分紧凑,极大地节约了空间,可以被安裝于任何慧鱼模型。并且其I/O点数满足系统要求,所以拟选用ROBOTICSTXT控制板。
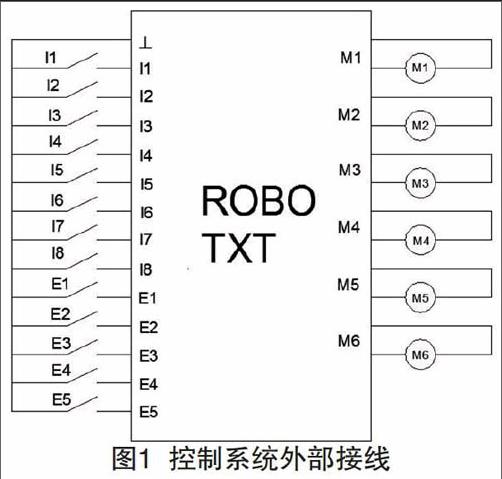
1.3 外部接线图设计
通过对控制任务的分析再结合上文的I/O分配,可以设计出ROBOTXT控制系统外部接线图如图1所示。
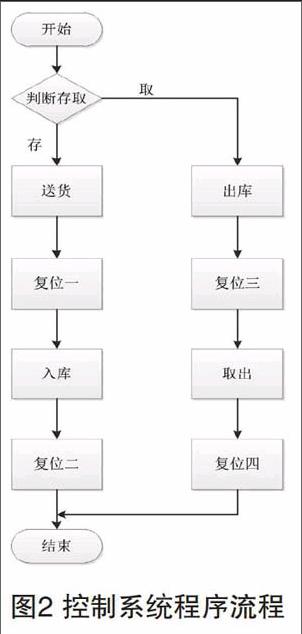
1.4 程序流程
由系统的控制要求可知,该系统存入快递和取出快递不会同时运作,所以可得到系统控制程序流程,如图2所示。
1.5 程序设计
1.5.1 主程序设计
系统根据用户的操作,判断流程走向。若是存入快递操作,则系统调用送货子程序,快递到达夹取平台后输送机构复位,启动入库子程序将快递存入货位,最后机械手复位到原点结束一个存入快递流程。若是取出快递操作,则系统先调用出库子程序,然后复位机械手,启动取出子程序再复位传送带将快递完全取出。具体程序如图3所示。
1.5.2 子程序设计
(1)复位子程序,整个系统的复位子程序共有4个。复位子程序一是对输送机构进行复位,即复位到输送起始位置;复位子程序二是在快递放入货位后将机械手夹臂缩回、下降、旋转,回到原点一,以便下次存入快递;复位子程序三是快递出库时机械手将快递放到传送带之后让机械手夹臂缩回,回到原点二;复位子程序四是在快递完全运出后复位传送带,即让传送带停止运作。机械手的复位程序如图4所示。
(2)存入子程序,按下存入开关,在传感器检测到有快递的情况下输送电机正转将快递推到夹取平台,在夹取平台上的传感器检测到快递后,先是输送电机反转回到起始位置,然后机械手从原点一伸出至夹取平台夹臂闭合夹住快递,机械手缩回、升高、旋转、伸出、夹臂打开将快递存入货位,最后回到原点一。
(3)取出子程序,得到取出指令后,系统开始响应。机械手从原点二开始动作,动作顺序依次为升高、旋转、伸出、夹臂闭合、缩回、旋转、下降、伸出、夹臂张开将快递放于传送带上,传送带上的传感器检测到快递后开始运作,将快递完全运出。
2 结语
(1)对于快递公司,随着网购市场的快速发展、国内人力成本的持续攀升,以人力为主体的快递公司几乎都面临着物流“最后一公里”的瓶颈问题。有人估算,如果物流公司将现在的点对点投送改为分区集中投送,快递员投递效率至少可以从平均60件/天提升到200件/天。也有人估算,快递自提模式至少能为快递公司增效45%。所以,就目前的校园投送问题、货到付款造成的派送延时问题、收件人不在家的无效投送及二次投送问题等,自提模式无疑是最好最直接的解决方案,多功能运取机因其在境外市场的成熟运作自然成为一个备受关注的智能化解决方案。
(2)中国人口红利并未完全消失,社会效率方面国内可再开发资源较多,“最后一公里”解决方案尚有多种途径可以深挖,而多功能运取机就是其中最具潜力的方案。
(3)目前许多小区物业己成为默认的邮件代收人,可以作为服务,但无形中却增加了物业的工作量及连带的责任与纠纷。多功能运取机就能解决这些问题,甚至还能带来一定的场租收益。
(4)成本相对于传统快递存取站点稍高,随着我国机械制造技术的发展,成本会越来越低,性价比越来越高。
[参考文献]
[1]冯清秀,邓星钟机电传动控制[M].5版.武汉:华中科技大学出版社,2013.
[2JFISCHERTECHNIKG.Anewsmartfishmodelofusermanual[Z].FischerGroupofCompanies,2009.
[3]邱宣怀.机械设计[M].4版.北京:高等教育出版社,2011.
[4]谢桂林.电力拖动与控制[M].北京:中国矿业大学出版社,2010.
[5]闻邦椿.机械设计手册[M].6版.北京:机械工业出版社,2011.
[6]孙桓,陈作模,葛文杰.机械原理[M].7版.北京:高等教育出版社,2012.endprint
