杆状物攀爬机器人关键技术综述
2018-02-05,,,,
,,,,
(山东建筑大学 信息与电气工程学院,济南 250101)
0 引言
高空极限工作环境如电力抢修、楼宇修缮、清洗喷涂等[1-4],通常具有劳动强度大、工作时间长、工作事故频发等特点。因此,研究替代人工完成作业的攀爬机器人,已成为国内外机器人领域重要的研究方向[5-6]。近些年,机器人技术发展迅速,部分已应用于医疗、工业、农业和林业等领域。攀爬机器人作为一种特殊机器人,受使用环境、功能和安全性的限制,仍处于试验阶段。因此,解决机器人的攀爬技术难题,降低高空作业危险,提高作业工作效率,替代人类完成监察、检测与维修等工作,具有十分重要的研究价值和意义[7-8]。
攀爬机器人是高空作业系统中重要的研究课题之一,国内外对于攀爬机器人的研究很多,但各项技术研究还未达到智能化和自动化水平。因此,本文基于攀爬机器人的研究成果,着重分析机器人研究中的关键技术问题,以期为攀爬机器人后续研究工作提供参考。
1 国内外研究现状
目前,攀爬机器人主要应用于高空作业。20世纪80年代,美国、日本等发达国家先后开展了攀爬机器人研究工作,自2000年以来,国内一些大学和科研院所等陆续开展了攀爬机器人研究工作,并取得一定的研究成果。早期,日本早稻田大学成功研制WOODY-1 爬树机器人(图1),该机器人通过两个环形夹持器的交替运动使得机器人沿着树干上下移动[9]。由于机器人过于笨重且不易控制,随后该大学对其进行了改进,研制出WOODY-2爬树机器人(图2),不仅简化了夹持机构,而且由原来的电机驱动变换为多关节协调运动的移动方式[10]。西班牙科学家基于 Stewart-Gough 并联平台,成功研发了一种环抱式攀爬机器人CPR(图3),该机器人装配4组夹紧机构,实现对树干的径向夹紧与松开动作,结合万向节完成机器人六自由度的定位与定向[11]。MIT 的Yeoreum Yoon和Daniela Rus设计了一款可在三维桁架上攀爬的机器人Shady3D(图4),通过躯干部分的3个自由度,保证机器人在平面任意角度桁架间移动,完成攀爬过渡动作。但该机器人存在一定的局限性,其行走动作受步距值的约束,行走方式与灵活性也没有达到人们理想的运动状态[12-13]。葡萄牙的 Mahmoud Tavakoli 等[14]成功研制出了一款爬杆机器人3D Climber(图5),机器人由1个4自由度的串联攀爬机构和2个夹持机构组成,通过电机驱动实现对圆杆的夹持动作。与Shady3D相比,3D Climber具有能在弯曲圆杆上攀爬的优点,且可操作性更强,但3D Climber的整体结构比较复杂,运动速度缓慢。伊朗也成功开发出一种爬杆机器人 UT-PCR(图6),通过驱动3组攀爬轮正、反向旋转,控制机器人沿杆状物上、下移动,但攀爬轮易滑动的特点导致机器人攀爬动作不稳定[15]。Carnegie Mellon University,Stanford University,University of California等[16]多所大学合作开发出了一款六足机器人Rise(图7),具有速度快、抓持能力强等优点,但是由于其采用多足协调运动的攀爬方式,控制系统较为复杂。

图1 WOODY-1 图2 WOODY-2
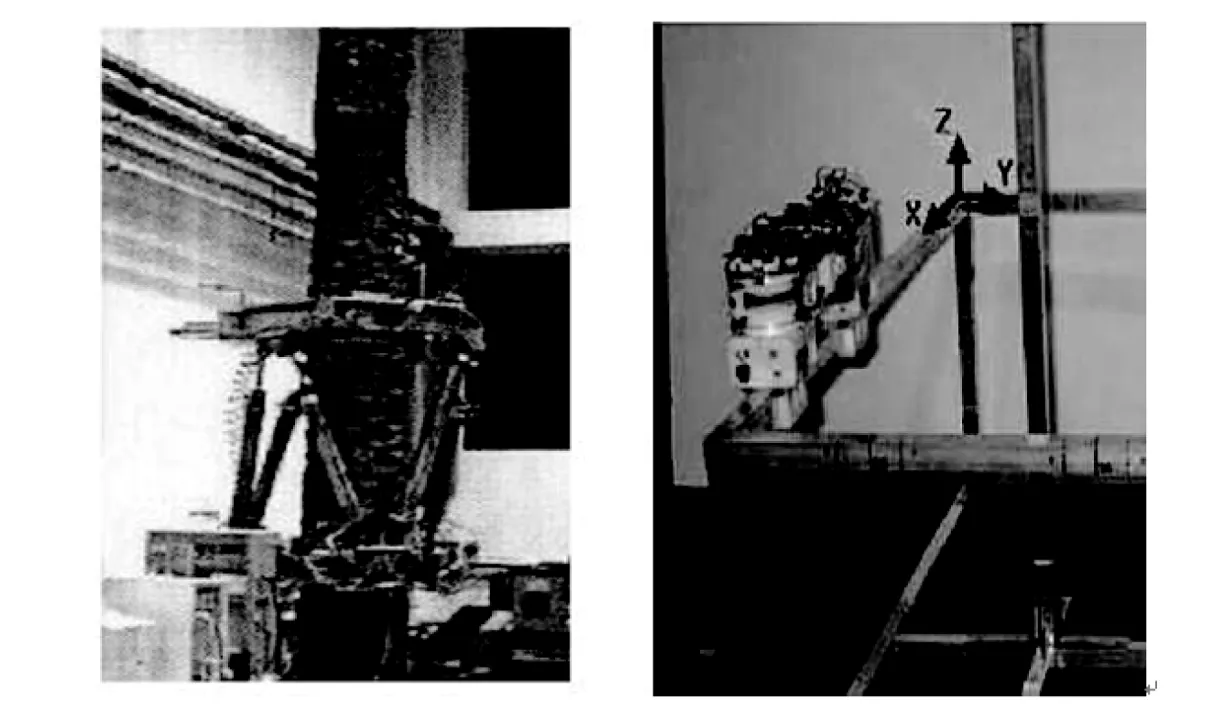
图3 CPR 图4 Shady3D

图5 3D Climber 图6 UT-PCR 图7 Rise
在国内,管贻生等[17]设计了一款双手爪爬杆机器人Climbot(图8),机器人末端2组夹持器可交替夹紧和松开杆状物,完成攀爬动作。由于其在避障和杆间过渡方面有明显的优势,因此可应用于建筑和化工等高空作业领域。香港中文大学Tin Lun Lam和Xu Yangsheng等[18]研发了一种小巧的爬树机器人Treebot(图9),该机器人具有较高的自由度和优越的扩展能力,同时还配备全方位的树木夹持器,使机器人粘附于不同直径的树木,适应复杂的攀爬环境。国内其他高校,如华南理工大学、哈尔滨工业大学等在攀爬机器人研究方向也做了很多努力,其成果为攀爬机器人后续的研究工作积累了丰富的经验[19-20]。
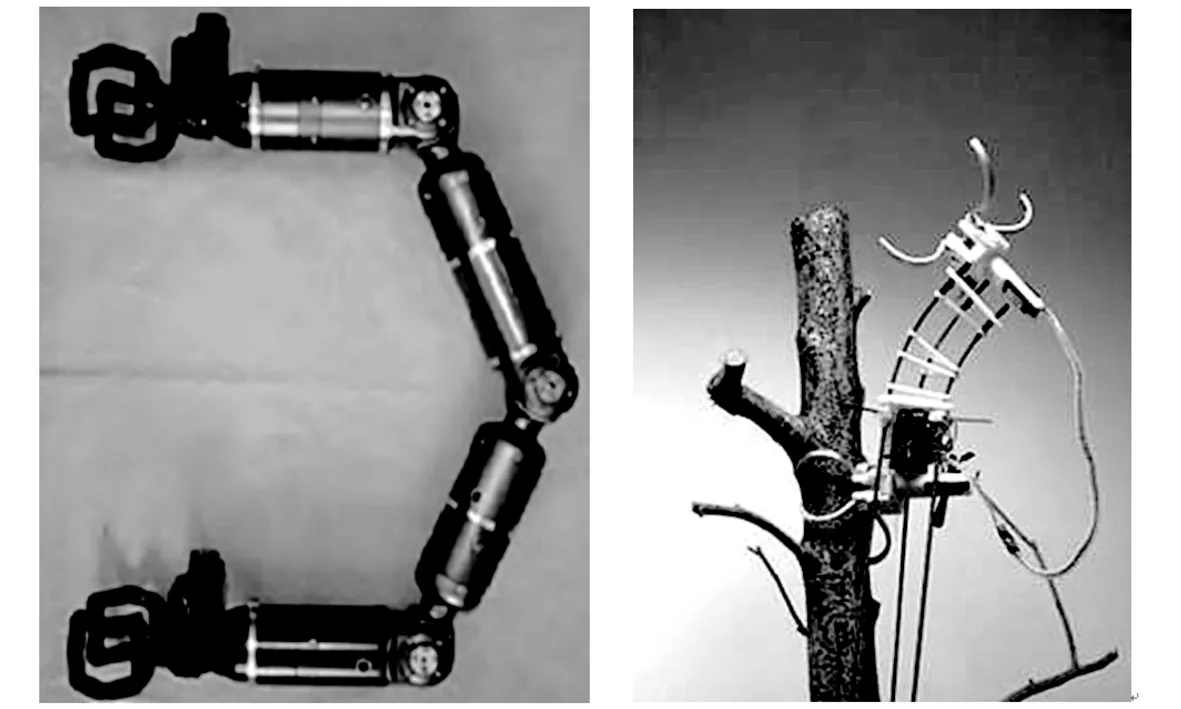
图8 Climbot 图9 Treebot
攀爬机器人作为高空作业机器中的一种,已初步具备代替人类完成简单高空作业的能力,鉴于高空作业环境复杂,对机器人结构、功能、通信等方面要求较高,现有技术还需进一步发展和完善。
2 高可靠性运动机构分析
可靠的运动机构是保证攀爬机器人高空作业的基础[21-22],其运动机构设计需满足如下几项技术指标:1)可实现在复杂环境下的平稳爬行,具有向上、向下、旋转和启停能力;2)具有故障自保护措施和防摔落机制;3)具有一定的载重能力,可搭载设备完成相应高空作业;4)具有灵活的越障能力,可避越高空环境下诸如线塔、树分支等障碍,并在越障时保证机器人姿态平稳。
机器人攀爬作业过程中,在保证承载设备安全的情况下,不能损伤被攀爬物。因此,针对攀爬对象的不同结构特点,需研制新型无损伤夹紧机构[23-25],目前可采用的夹紧方式有环抱式、钩爪式、夹持式等,各夹紧机构的原理及特点如表1所示。

表1 攀爬机器人不同夹紧方式分析
通过表1分析得知,不同的攀爬对象,对机器人夹紧机构要求不同。不仅需要夹紧机构具有夹持力度,还要求其不对攀爬对象造成损害。因此,需要针对攀爬环境,研发出一款可靠的运动机构,比如,通过研制气囊夹紧机构等新发明、新想法,保证攀爬机器人代替人类完成复杂的高空作业。
3 机器人自主行为控制
攀爬机器人不同于常规机器人,高空环境作业时,运动姿态变化较大。考虑到越障、载物作业运动过程中受摩擦力、重力等因素影响,实现机器人自主行为控制难度较大[28-29]。为提高机器人智能化和自动化水平,实现机器人自主攀爬、避障和高空作业,需要解决如下技术问题。
3.1 攀爬机器人动力学建模与分析
准确的动力学建模是实现攀爬机器人运动控制、导航和越障的前提。攀爬机器人动力学建模需要考虑以下问题。
1)必须考虑机器人与攀爬对象间的非线性动力学耦合特性。由于攀爬机器人所处高空环境具有强干扰、动态等特征,使攀爬机器人成为十分复杂的控制对象[30-31]。同时,机器人在直线越障或者变向作业时,由于自身姿态调整引起机器人重心不稳定,使夹紧装置给攀爬对象一个反作用力,这样,攀爬机器人与攀爬对象间构成了一个强耦合系统。
2)考虑攀爬机器人在复杂的环境作业中自身结构参数的变化。为了提高攀爬和作业效率,机器人应尽可能轻质高速,减少攀爬过程中因构件破损或变形等自身因素带来的影响。因此,在机器人高空作业时,综合考虑上述问题对攀爬机器人动力学研究是十分必要的。
3.2 攀爬机器人运动控制
机器人根据计算机下达的控制指令实现精准的运动控制,以保证机器人顺利、精确的完成攀爬作业。此时,采用传统控制策略很难满足实际控制要求,综合考虑攀爬过程中不确定性因素对机器人动力学特性的影响,需结合自适应控制、滑模变结构控制、鲁棒控制、视觉伺服控制、模糊控制或神经网络等智能控制方法,实现攀爬机器人在高空作业环境下的精确运动控制。
在设计控制系统时可采用如图10所示的分布式架构,即将总系统分为后台管理层、数据通信层和移动终端层,协同完成攀爬机器人夹紧机构和高空作业执行机构的运动控制。
晋地历史上有过几次较为集中的学术思想高峰期,皆为外地名宦、寓贤与晋地学人学术交融的结果。 以下略作梳理。

图10 攀爬机器人运动控制系统结构
后台管理层包括机器人后台监控计算机、硬盘录像机、硬件控制与分析软件系统等;数据通信层主要是保障管理层与智能终端层的网络数据的传输;移动终端层包括攀爬机器人、安全防护系统、电源管理系统和多传感器监测系统等。管理层是攀爬机器人系统的监控中心,通过无线网络与攀爬机器人进行数据传输,发送攀爬任务和实时的监视、遥操作等数据。移动终端层中的攀爬机器人是整个系统的移动载体,也是机器人信息采集、运动控制的载体,可以对当前攀爬机器人运动状态进行识别,并接受和执行控制指令;同时,可以对攀爬机器人进行协调控制,以实现路径规划处理与避障,完成传感器的信息处理与传输。
3.3 攀爬机器人导航技术
导航是智能攀爬机器人实现自主控制需要解决的重要问题,而环境感知与建模、定位和路径规划被称为机器人导航的三要素[32]。
3.3.1 环境感知与建模
攀爬机器人完成自主导航,需要根据传感器信息识别多种环境信息,如攀爬物体边界、攀爬物体形状、高空障碍等,通过环境感知确定前进方向中的可达区域和不可达区域,为局部路径规划提供依据。机器人在攀爬过程所用到的传感器种类较多,如超声波和红外测距传感器,可用于障碍物检测;激光雷达和视觉传感器,可用于环境感知和建模。因此,攀爬机器人采用多信息融合技术,综合利用多种传感器获取信息,增强环境的适应性,便于完成攀爬作业。
3.3.2 定位
攀爬机器人定位就是确定其在高空环境中相对于坐标系的位置及方向。目前机器人定位方法主要有惯性定位、卫星定位、地图模型匹配和仿生导航定位技术等[33-34]。其中,惯性定位是使用陀螺和加速度计分别测量旋转率和加速率,获得机器人本体实时位置、速度、姿态等信息,但惯性误差经过积分产生无限的累积,这对于长时间的高空攀爬作业很难实现精确定位;卫星定位适用于室外无遮挡时对机器人定位,这对攀爬机器人的高空作业具有较高的引导作用;地图模型匹配是一种机器人利用其自身的传感器创建一个自己的局部环境的技术,然后把局部地图与保存在内存的全局地进行比较,进而计算出自己在环境中的真实位置和方位。该技术对构造的传感地图的精度有严格的要求,当前只限于实验室或相对简单的环境。仿生导航技术是利用人和其它动物生活中的一些功能系统,根据视觉、听觉、味觉等信息的处理原理,模仿出类似的定位与导航系统,在一些特种环境下有相当的应用需求。基于上述分析,针对不同作业环境下对机器人定位精度的要求,可融合2~3种定位技术确定攀爬机器人作业位置,进而保证机器人精确完成攀爬任务。
3.3.3 路径规划
攀爬机器人的自主导航包括全局攀爬路径规划与局部越障、避障规划[35-36]。全局路径规划方法通常包括:自由空间法、正规栅格法、拓扑法、蚁群算法等;局部路径规划方法通常包括:人工势能法、神经网络法、模糊算法、遗传算法等。各算法的原理及特点如表2所示。
4 攀爬机器人应用技术
攀爬机器人的安全问题会对机器人和作业对象造成无法估计的损失,所以即使攀爬机器人具有自主作业能力和报警功能,复杂环境下仍需要在操作人员的监控下完成,以确保其安全作业[37-38]。同时,攀爬机器人若遇到特殊情况,还需通过操作人员在后台监控下对机器人遥操作,继续攀爬作业或者停止作业。因此,在机器人远程监控和遥操作部分需解决的高级应用技术问题如下所述。
4.1 可靠通信技术
攀爬机器人高空作业存在工作环境复杂、作业要求质量高等特点,同时需要作业人员通过远程监控和遥操作确保机器人稳定运行,因此,高可靠性的无线通信技术十分重要[39-40]。攀爬机器人可通过无线通信技术传输视频、图像、传感器状态信息等,也可接收操作人员发送的控制指令。鉴于无线通信可能会受到噪声和同频信号的干扰,所以,无线通信需具备一定抗干扰能力,且保证数据传输的距离和稳定性,使机器人顺利完成高空作业。
4.2 遥操作技术
目前,攀爬机器人的研究大多集中在机械结构设计和步态分析方面,机器人几乎都在无障碍的直杆环境下攀爬,对于机器人在非结构化杆件环境中攀爬的讨论较少[41-42]。由于非结构化杆件环境的不确定性和复杂性,使机器人自主攀爬受到巨大阻碍,因此,操作者通过摇杆对攀爬机器人进行控制以适应更多未知杆件环境显的尤为重要。

表2 路径规划方法分析
对攀爬机器人进行遥操作,可采取如下方法。首先,使用普通摇杆作为输入设备,对机器人的攀爬步态分析研究,设计不同的操作坐标系和运动映射。其次,通过建立变换矩阵将机器人的夹持机构描述在同一坐标系中。最后,利用优化方法求解平面运动可夹持空间,用于指导摇杆操作,使得攀爬控制有一定预测性。
4.3 攀爬机器人监测平台
为保障攀爬机器人高空作业的安全性,需实时监控机器人的工作状态,因此要求操作人员与攀爬机器人进行信息交互,监测平台则是攀爬机器人与操作人员的主要交互平台。
4.3.1 实时监测
通过采集攀爬机器人反馈的图像、视频和传感器状态等信息,操作人员可有效掌握机器人在高空作业时的位置和动态,并实时修正和调节机器人运动状态。
4.3.2 故障分析
监测平台可实现数据、图像的传输、存储、查询等功能,通过分析传感器信息,判断机器人当前运动状态。基于反馈的夹紧力度、攀爬速率、故障坐标及建议处理方案等信息,及时调整机器人运动姿态,顺利完成高空攀爬作业。
5 结论与展望
采用攀爬机器人代替人类完成高空作业是机器人技术迅速发展的标志,是一种降低高空作业风险有效的方法。攀爬机器人已应用于工业、农业和林业等众多领域,特别对于电力行业、建筑行业的高空巡检、外墙喷涂及检修等具有十分重要的意义。
伴随着机器人技术向自动化、智能化方向发展,攀爬机器人在工业建设等领域大规模使用还有很长的路要走,需结合以下几个方面展开研究。
5.1 整体质量和承载能力
目前,部分攀爬机器人整体质量较大,导致机器人能源供应不足,攀爬过程中易出现动力衰竭、滑落等现象。此外,攀爬机器人执行任务时需要承载设备,额外增加的重量将改变其重心的位置,产生安全隐患。因此,平衡整体质量和承载能力间的关系是未来攀爬机器人重要的研究方向。
5.2 运动速度
快速、精确地到达高空作业地点是攀爬机器人的一大优势。然后作业环境复杂,越障能力差,攀爬速度慢是现阶段攀爬机器人要面对的技术性难题。攀爬机器人作为一个集机械、电子和软件的综合系统,势必要解决攀爬速度慢、能源供给不足等问题,使机器人各构件协调动作,达到快速稳定攀爬的目的。
5.3 多传感器信息融合
根据不同传感器特性,结合多传感器信息融合技术,研究多传感器间信息交互方法,进一步提高攀爬机器人的高空检测、障碍物识别、空间定位的精确度。
5.4 相关技术标准
对攀爬机器人系统进行现场测试、改进、定型,形成在不同攀爬作业要求下,攀爬机器人、运行与维护规范、能源保障系统和试验与测试等相关技术标准和规范。
[1] 王 巍, 张厚祥. 曲面幕墙清洁机器人攀爬技术[J]. 北京航空航天大学学报, 2008, 34(1):17-21.
[2] Kakogawa A, Nishimura T, Ma S. Designing arm length of a screw drive in-pipe robot for climbing vertically positioned bent pipes[J]. Robotica, 2014, 34(2):1-22.
[3] 江 励, 管贻生, 蔡传武,等. 仿生攀爬机器人的步态分析[J]. 机械工程学报, 2010, 46(15):17-22.
[4] 曹志华, 陆小龙, 赵世平,等. 电力铁塔攀爬机器人的步态分析[J]. 西安交通大学学报, 2011, 45(8):67-72.
[5] Han S, Ahn J, Moon H. Remotely controlled prehensile locomotion of a two-module 3D pipe-climbing robot[J]. Journal of Mechanical Science and Technology, 2016, 30(4):1875-1882.
[6] 江 励, 管贻生, 周雪峰,等. 双爪式爬杆机器人的夹持性能分析[J]. 机械工程学报, 2016,52(3):34-40.
[7] Fu G H, Liu X M, Chen Y F, et al. Fast-growing forest pruning robot structure design and climbing control[J]. Advances in Manufacturing, 2015, 3(2):166-172.
[8] 张丹丹. 高压输电线路塔架攀爬机器人结构设计[J]. 机械传动, 2015,39(3):93-96.
[9] 蔡传武, 管贻生, 周雪峰,等. 双手爪式仿生攀爬机器人的摇杆控制[J]. 机器人, 2012, 34(3):363-368.
[10] Almonacid M, Saltarén R J, Aracil R, et al. Motion planning of a climbing parallel robot[J]. IEEE Transactions on Robotics & Automation, 2003, 19(3):485-489.
[11] Aracil R, Saltaren R J, Reinoso O. A climbing parallel robot: a robot to climb along tubular and metallic structures[J]. IEEE Robotics & Amp Amp Automation Magazine, 2006, 13(1):16-22.
[12] Yoon Y, Rus D. Shady 3D: A robot that climbs 3D trusses[A]. Proceedings - IEEE International Conference on Robotics and Automation[C]. 2007,8(10):4071-4076.
[13] Guan Y, Jiang L, Zhu H, et al. Climbot: A Bio-Inspired Modular Biped Climbing Robot—System Development, Climbing Gaits, and Experiments[J]. Journal of Mechanisms & Robotics, 2016, 8(2):1011-1017.
[14] Tavakoli M, Marjovi A, Marques L, et al. 3D Climber: A climbing robot for inspection of 3D human made structures[A]. IEEE/rsj International Conference on Intelligent Robots and Systems[C]. 2008:4130 - 4135.
[15] Mahdavi S, Noohi E, Ahmadabadi M N. Path planning of the Nonholonomic Pole Climbing Robot UT-PCR[A]. IEEE International Conference on Robotics and Biomimetics[C]. IEEE Computer Society, 2006,6(6):1517-1522.
[16] Guizzo E, Ackerman E. The rise of the robot worker[J]. IEEE Spectrum, 2012, 49(49):34-41.
[17] 胡 杰, 管贻生, 吴品弘,等. 双手爪爬杆机器人对杆件的位姿检测与自主抓夹[J]. 机器人, 2014, 36(5):569-575.
[18] Lam T L, Xu Y. A flexible tree climbing robot: Treebot - design and implementation[J]. 2011, 19(6):5849-5854.
[19] Guan Y, Jiang L, Zhang X. Mechanical design and basic analysis of a modular robot with special climbing and manipulation functions[A]. IEEE International Conference on Robotics and Biomimetics[C]. 2008,7(4):502 - 507.
[20] Wang W. A caterpillar climbing robot with spine claws and compliant structural modules[J]. Robotica, 2014, 1(7):1-13.
[21] Espinoza R V, Oliveira A S D, Arruda L V R D, et al. Navigation’s Stabilization System of a Magnetic Adherence-Based Climbing Robot[J]. Journal of Intelligent & Robotic Systems, 2015, 78(1):65-81.
[22] Kakudou T, Watanabe K, Nagai I. Study on mobile mechanism of a climbing robot for stair cleaning: a translational locomotion mechanism and turning motion[J]. Artificial Life and Robotics, 2013, 17(3):400-404.
[23]Tavakoli M, Lourenço J, Viegas C, et al. The hybrid Omni Climber robot: Wheel based climbing, arm based plane transition, and switchable magnet adhesion[J]. Mechatronics, 2016, 36(3):136-146.
[24] Yan C, Sun Z, Zhang W, et al. Design of novel multidirectional magnetized permanent magnetic adsorption device for wall-climbing robots[J]. International Journal of Precision Engineering and Manufacturing, 2016, 17(7):871-878.
[25] Osswald M, Iida F. Design and control of a climbing robot based on hot melt adhesion[J]. Robotics & Autonomous Systems, 2013, 61(6):616-625.
[26] Guan Y, Jiang L, Zhu H, et al. Climbot: A modular bio-inspired biped climbing robot[A]. Proceedings of the. IEEE/RSJ International Conference on Intelligent Robots and Systems[C].2011,12(3):1473-1478.
[27] Filipovic M, Kevac L, Djuric A, et al. The importance of the development and application areas of different structures of Cable-suspended Parallel Robot-CPR systems[A]. International Conference Icetran[C]. 2015:252-259.
[28] 杨 萍, 王彦云. 阶梯攀爬机器人行走机构的设计与动力学分析[J]. 机械设计与研究, 2016,32(2):51-53.
[29] 叶长龙, 佟泽卉, 于苏洋,等. 全方位移动装配机器人运动学分析[J]. 机器人, 2016, 38(5):550-556.
[30] 王 蕾, 陆小龙, 赵世平,等. 电力铁塔攀爬机器人直线推杆机构设计与分析[J]. 机械设计与制造, 2012,3(3):52-54.
[31] Yao J, Gao S, Jiang G, et al. Screw theory based motion analysis for an inchworm-like climbing robot[J]. Robotica, 2015, 33(8):1704-1717.
[32] 张 铮, 李振波, 胡寿伟,等. 混合传感器网络中的移动机器人导航方法[J]. 机器人, 2014,36(3):316-321.
[33] Espinoza R V, Oliveira A S D, Arruda L V R D, et al. Navigation’s Stabilization System of a Magnetic Adherence-Based Climbing Robot[J]. Journal of Intelligent & Robotic Systems, 2015, 78(1):65-81.
[34] 贺继林, 郑海华, 赵喻明,等. 基于视觉的探测机器人导航[J]. 华中科技大学学报(自然科学版), 2013, 41(S1):267-270.
[35] 吴宗胜, 傅卫平. 移动机器人全局路径规划的模拟退火-教与学优化算法[J]. 机械科学与技术, 2016, 35(5):678-685.
[36] 曾 辰, 许 瑛. 一种蜂巢栅格下机器人路径规划的蚁群算法[J]. 机械科学与技术, 2016, 35(8):1308-1312.
[37] Nam S, Oh J, Lee G, et al. Dynamic analysis during internal transition of a compliant multi-body climbing robot with magnetic adhesion[J]. Journal of Mechanical Science and Technology, 2014, 28(12):5175-5187.
[38] Pinzonmorales R, Hirata Y. Spontaneous firing activity in climbing fiber is critical for a realistic bi-hemispherical cerebellar neuronal network during robot control.[J]. BMC Neuroscience, 2014, 15(1):1-2.
[39] 左 韬, 闵华松, 张雄希. 基于实时以太网的机器人通信总线控制系统[J]. 计算机工程与设计, 2016, 37(5):1141-1144.
[40] Stoller O, Schindelholz M, Bichsel L, et al. Cardiopulmonary responses to robotic end-effector-based walking and stair climbing[J]. Medical Engineering & Physics, 2014, 36(4):425-431.
[41] 汤 卿, 刘丝丝, 尚留记,等. 基于KUKA工业机器人的遥操作控制系统设计与异构主从控制方法研究[J]. 四川大学学报(工程科学版), 2016, 48(1):180-185.
[42] 王耀南, 魏书宁, 印 峰,等. 输电线路除冰机器人关键技术综述[J]. 机械工程学报, 2011, 47(23):30-38.
[43] Zhu H, Guan Y, Chen S, et al. Single-step collision-free trajectory planning of biped climbing robots in spatial trusses[J]. Robotics and Biomimetics, 2016, 3(1):1-9.
[44] Stoller O, Schindelholz M, Hunt K J. Robot-Assisted End-Effector-Based Stair Climbing for Cardiopulmonary Exercise Testing: Feasibility, Reliability, and Repeatability.[J]. Plos One, 2015, 11(2):271-278.
