强干扰环境下的自主导航与控制新技术
2018-01-30田苗苗
田苗苗
摘要:随着科学技术的不断发展,自主导航以及远程控制技术都得到了较快的发展,而将其应用的机器无人机就是其中一项,尤其是在中小型无人机方面,因其有着控制方便,飞行快捷简便的特点,所以得到了人们的广泛应用。
【关键词】强干扰环境 自主导航 控制新技术分析
1 组合导航系统的分析与设计
1.1 系统的具体分析
GNSS导航被称为全球卫星导航系统,它的构成主要包括:地而站台、用户定位设备、导航卫星等。GNSS在实施定位的过程为它是利用广播来对卫星的运行参数及位置进行传播,然后通过采用用户接收机来对卫星信号的传播时问进行精准的测量,并采用方程式组合方程组的方式和模型对其数据进行计算,以此来了解用户与卫星之问的相对位置,在利用导航算法来计算出用户的精准位置。
1.2 组合导航系统的设计分析
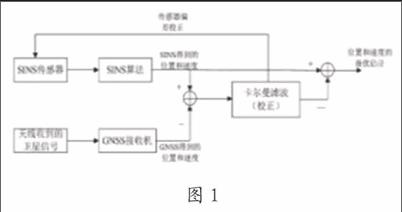
由图1可知,在两者结合的导航系统当中,两个单独的子系统会独自显示自己的定位,进行定速计算,在通过卡尔曼滤波器将两者的输出信息进行整合,在由过滤波对SINS传感器所产生的偏差进行计算和估量,然后在把偏差值进行反馈,传递给SINS传感器,并对其进行实时的校正,在这种组合方式当中,SINS导航是占据主导地位的,所以此系统又被称作是GNSS辅助性的SINS导航系统。
2 抗干扰滤波技术分析
现阶段,通常被应用在组合导航系统中的滤波方法就是卡尔曼方法,它是以状态估计的方式来对其飞行状态进行分析,因其有着计算简便、结构简易等特点,所以得到人们的广泛认可。针对组合导航系统,曾直接应用了卡尔曼滤波方法,对非线性的组合系统进行离散分开,在一定程度上取得了很好的效果。但对于强风、载体震动、晃动等方而的干扰却不能避免,因此还需要对其技术进行强化和完善,对其进行更加深入的研究,以便可以将其应用在自主导航技术及控制新技术当中,强化导航系统的抗干扰性。
3 中小型无人机的自动驾驶仪系统
它的核心部件主要是名为MPC555的中央式处理器,这款处理器的配置十分的高,运行方而可以达到40 MHz,448K Flash,26KSRAM的水平,同时它的系统还包含有其他方而的功能,比如高速巡航、三轴陀螺加速、气压感应、温度检测等。相对于其他的自动驾驶仪来说,Piccolo Ⅱ的优势非常的明显,因为它本身就是一个完整的航空电子系统,除了基本的自动驾驶核心功能以外,我们还可以体验到大气的压力变化传感、自动导航、无线连接等一系列功能,同时还可以在满足这些功能的前提下达到非常小的功率而降低能耗。它的整体尺寸为长*宽*高142mm×46 mm×62.6 mm,整体的重量仅仅220g。其实Piccolo II已经经过了Cloud Cap长达10年之久的研究和改进,现在已经达到了无人机行业标准的飞行标准。Piccolo Ⅱ在进行全程无人驾驶以后,还可以自己进行软着陆。因为Piccolo Ⅱ具有非常大优势,目前已经在很多的无人机系统得到了广泛的应用。
3.2 MP2128LRC2
MP2128LRC2是一种具有稳定性强、传输距离远和集成化小的无人机自动驾驶仪。它的内部安设了远距离输送数据的单元,也就是LRC,因其有着双重数据链路和双频的工作方式,所以使其自身数据传输的稳定性得到了极大的保证,确保了其飞行距离,甚至可达20-50km。也正因为其有这样的特点,所以将其应用在小型无人机上更加适用。现阶段,已经将其成功的应用在了固定翼飞机、多旋翼以及直升飞机等方而。它的内部含有三轴陀螺,GPS接收器等,其中陀螺最大的动态范围可达到3 00/s,加速度的加计量程最大也可达到2g,GPS的更新频率为1Hz。在输出方而含有12个通道舵机输出,其PID的更新频率在30Hz,能适用在小型无人机的自主起飞和着陆方而,而且此驾驶仪在体积和质量方而也有着较大的优点,质量自身重330g,体积为175*75*48mm,加之给予其c配备了HORIZONmp的地而软件,使其在任务执行以及远程控制方而能够很好的保持自身的特性,维持其稳定性。
3.3 APM
APM也是一种开源性的自动驾驶仪,主要是通过PX4的软硬件来对其进行管控的。在此驾驶仪当中其飞行的硬件控制重要部分就是Pixhawk,主要使用的是CortexM4内核处理器STM32F427作为主控制器。在Pixhawk中包含有三轴磁力计、气压高度计、三轴陀螺加计等,且还配置有与GPS相连接的外部磁强计接口,可以实现对CAN、UART等信号的输入,有很强的可拓展性。通常情况下,会将此种自动驾驶仪应用在直升机、多旋翼飞机、固定翼飞机、船、车或一些移动机器人方而,多用于定位或提供控制信息,可以让承载物能够准确平稳灵活的自动飞行。在驾驶仪中的地而控制软件中融入了谷歌地图,其有着对机体进行设置并对其对象进行控制的性能,而且可以对飞行的线路进行记录和分析,对自身的PID参数进行调节,实现对无人机的模拟飞行等。也正因APM有着独特的优势,所以被广大研究者所研究,以便于为小型无人机以及其它的运输设备提供一款成本低廉功能齐全可靠的自动驾驶仪。
4 总结
中小型无人机导航与控制系统也就是我们通常所说的自动驾驶仪,需要有关学者强化对此方而的研究,以便于提高自动驾驶仪的环境适应能力,提高自身的稳定性與可靠性,使其能够长久持续的发展,为我国信息的提供、数据的勘探等做出贡献。
参考文献
[1]于正湜,崔平远.行星着陆自主导航与制导控制研究现状与趋势[J].深空探测学报.2016 (04): 345-355.
[2]孙泽洲,张廷新,张熇,贾阳,张洪华,陈建新,吴学英,申振荣,嫦娥三号探测器的技术设计与成就[J].中国科学:技术科学,2014(04): 331-343.
[3]李俊峰,崔文,宝音贺西. 深空探测自主导航技术综述[J].力学与实践,2012(02):1-9.
[4]陈忠贵,帅平,曲广吉.现代卫星导航系统技术特点与发展趋势分析[J].中国科学(E辑:技术科学),2009(04):686-695.endprint
