多旋翼燃料电池无人机能量管理策略研究*
2018-01-29张志祥王佳斌
张志祥,肖 铎,王佳斌
(浙江大学城市学院,浙江 杭州 310015)
0 引言
电动多旋翼无人机续航时间普遍不足半小时[1],续航时间短成为制约其发展的重要因素。新型燃料电池混合动力系统开始逐步取代传统的单一能源动力系统。燃料电池动态性能比较软,而无人机在抗湍流、变换飞行姿态等工况下需要较大瞬间功率[2],因此能量管理策略是无人机混合动力研究的核心技术之一,在满足无人机负载瞬时变化的需求下,燃料电池和辅助电源按照能量管理算法实时分配功率输出,提高燃料利用效率,延长电池使用寿命,使各设备处于最佳工作状态。目前,国内外对多旋翼无人机动力系统的能量管理策略研究较少,除了系统模型和工作状态有所差别外,无人机的能量管理相较于混合动力汽车有很多相似之处,因此,在对无人机进行能量管理时可以借鉴混合动力汽车已有的经验。混合动力汽车的能量管理策略主要分为基于规则的控制策略和基于优化的控制策略[3],基于规则的控制策略中逻辑门限控制策略[4]、功率跟随控制策略[5]和常规模糊控制策略[6]应用广泛,这种控制策略主要依赖于专家经验和工程实践;而基于优化的控制策略需要采集特定工况或循环工况的全部数据,在实际工程中应用难度较高[7]。文献[8]中采用逻辑门限控制策略对油电混合动力无人机系统进行能量管理,算法仿真和实验测试结果表明该控制策略能够满足无人机飞行需求并有效减少了燃油的消耗,但反复启动开关会导致电池寿命大打折扣。李延平[9]等采用功率跟随控制策略对无人机能量管理进行了研究,验证了控制策略的可行性,但不能保证混合动力系统能量的最优分配。
本文采用模糊控制策略对多旋翼无人机进行能量管理,将需求功率误差信号、锂电池荷电状态(State of charge, SOC)和燃料电池氢气压强作为模糊控制的输入,对燃料电池输出功率和锂电池输出功率进行动态分配和管理,在算法仿真的基础上利用STM32F103设计实现了能量管理控制器,最后在3 kW大疆植保无人机上进行了改装和飞行测试。仿真和测试结果表明:模糊能量管理策略在满足无人机负载动态变化的前提下,混合动力系统的续航时间可达到90 min 以上,整机效率提高了80%,同时燃料电池和锂电池工作在最佳工况。
1 无人机混合动力系统结构
如图1所示,无人机混合动力系统主要由质子交换膜燃料电池(Proton Exchange Membrane Fuel Cell, PEMFC)系统、蓄电池、DC-DC变换器、无人机电调、无刷直流电机、螺旋桨等多种零部件组成。无人机在工作过程中,燃料电池作为主要动力源提供无人机飞行所需功率,但燃料电池特性偏软,无法满足无人机负载如瞬时启动、爬升、大风等突发情况下的大功率需求,需要配置辅助蓄电池,辅助动力电池能够在短时间内提供大功率,同时在无人机需求功率不高的情况下由燃料电池对蓄电池进行充电。按照一定的控制策略,对燃料电池和蓄电池输出功率进行合理的优化分配,在满足无人机飞行需求的基础上提高燃料经济性,延长续航时间。
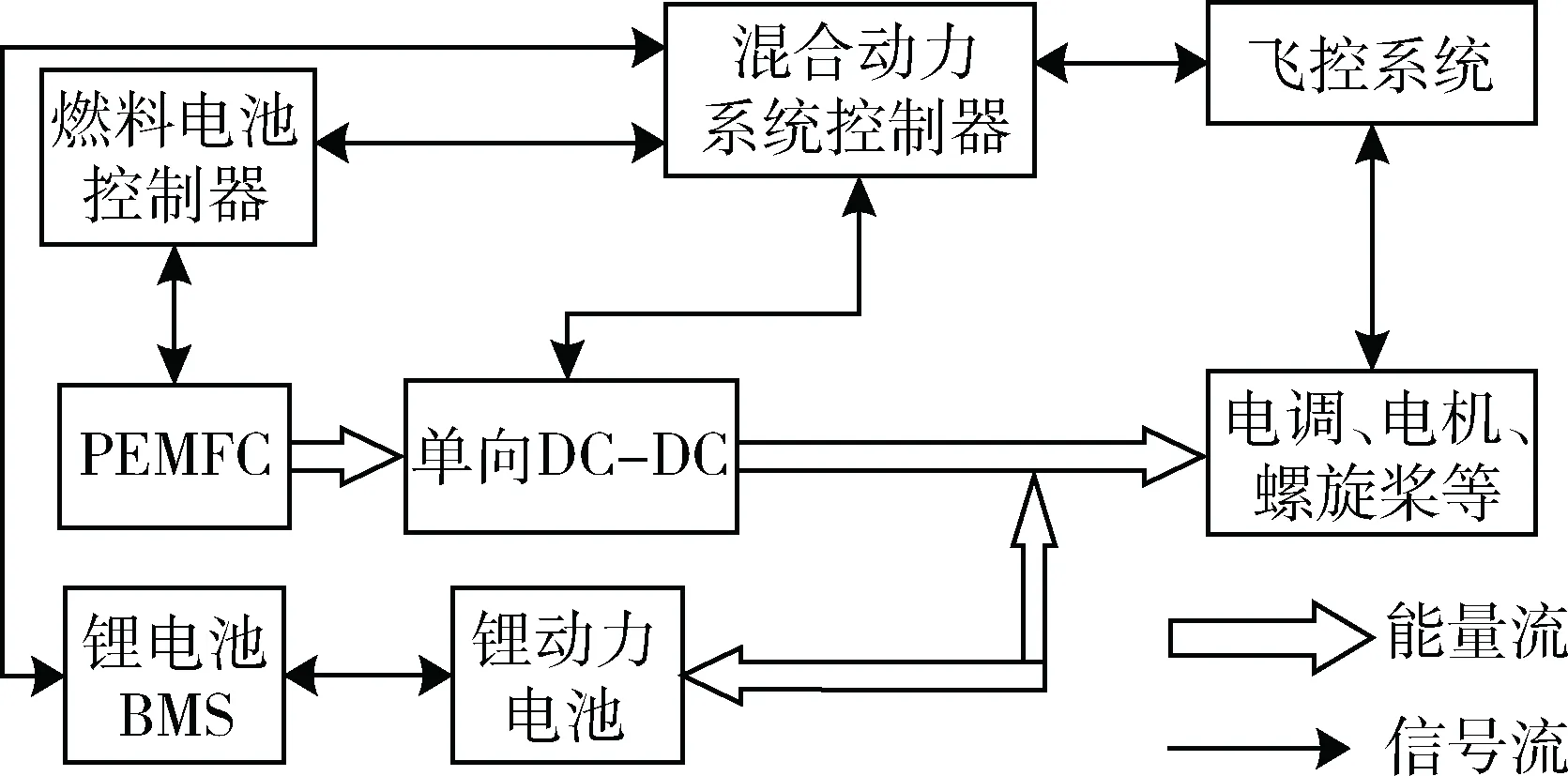
图1 无人机混合动力系统
电动多旋翼无人机工作模式主要可分为以下三种:(1)起飞/爬升/应急模式:无人机需求功率很大,燃料电池输出恒定功率,不足部分由锂电池输出;(2)巡航模式:无人机处于正常工作状态,燃料电池输出功率和需求功率大致相当,锂电池作为辅助电源;(3)轻载模式:无人机载荷减小、悬停、下降等情况下,需求功率小于燃料电池额定功率,此时燃料电池为无人机提供能量的同时给锂电池充电。无人机系统主要技术参数及性能指标如表1所示。
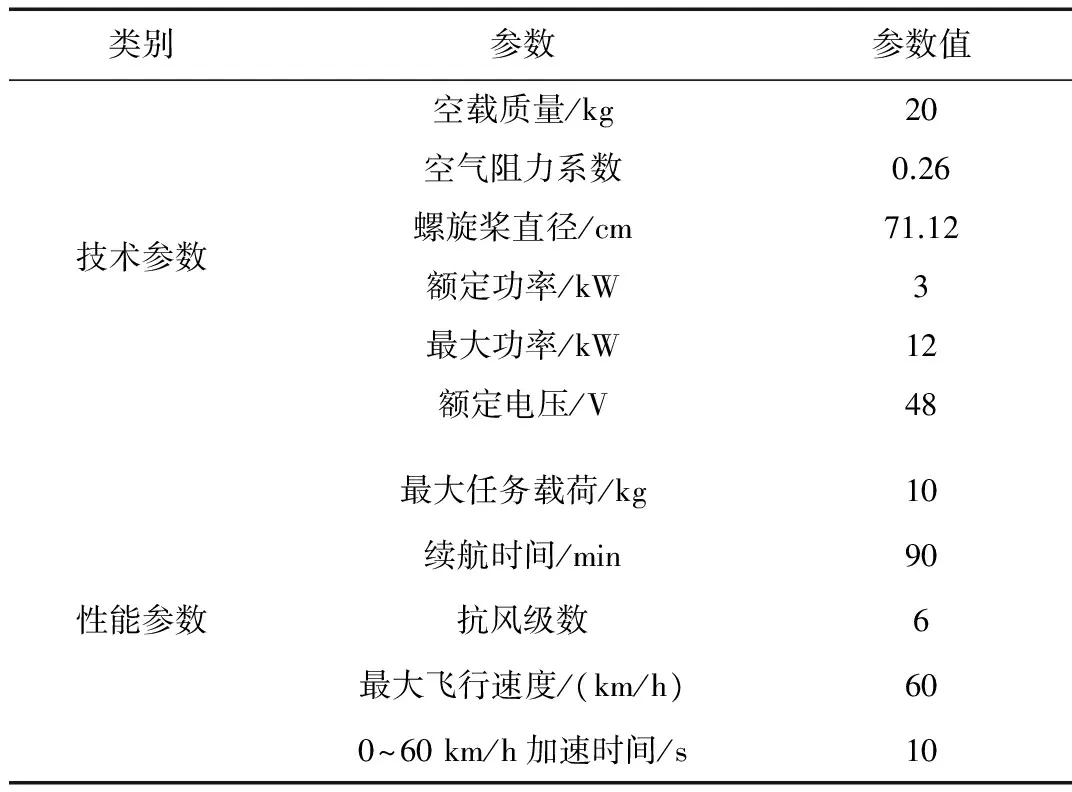
表1 无人机系统主要技术参数及性能指标
2 能量管理策略
在无人机真实的飞行过程中,系统的工作状况受诸多环境因素的影响,难以建立精确的数学模型,模糊控制利用人类思维的模糊性编写模糊规则,完成模糊推理,克服了系统模型不确定的困难[10]。混合动力系统能量管理策略示意图如图2所示,模糊控制器是燃料电池混合动力系统能量管理策略的关键模块。将无人机需求功率误差信号Pe、锂电池SOC和燃料电池氢气压强PH2作为模糊控制的输入,燃料电池输出功率Pfc和锂电池输出功率Pli作为模糊的输出,实现对双电源的能量分配和管理。
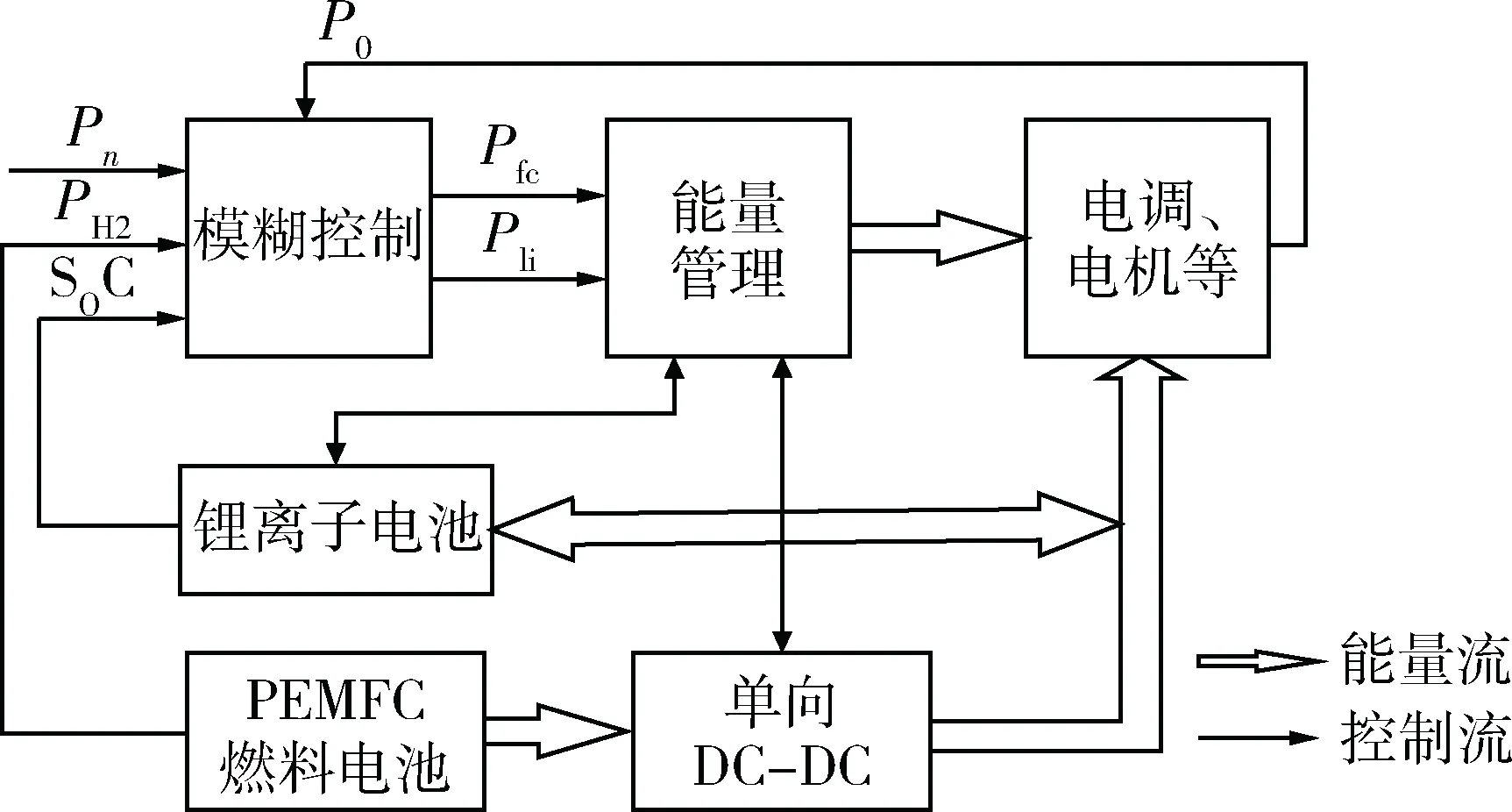
图2 混合动力系统能量管理策略
本文首先根据专家经验设计模糊控制系统,隶属度函数选择平滑的高斯函数。模糊系统输入变量中,功率误差信号Pe的基本论域为[-8,12] kW,划分为NB(负大)、NM(负中)、MS(负小)、ZO(零)、PS(正小)、PM(正中)、PB(正大)7个模糊集合,隶属度函数如图3所示;锂电池SOC的基本论域为[10,100]%,划分为ZO(零)、PS(正小)、PM(正中)、PB(正大)4个模糊集合,隶属度函数如图4所示;燃料电池氢气压强PH2的基本论域为[1,30] Mpa,划分为ZO(零)、PS(正小)、PM(正中)、PB(正大)4个模糊集合,隶属度函数如图5所示。模糊系统输出变量中,燃料电池输出功率Pfc的基本论域为[0,5] kW,划分为ZO(零)、PS(正小)、PM(正中)、PB(正大)4个模糊集合,隶属度函数如图6所示;锂电池输出功率Pli的基本论域为[-3,9] kW,划分为NB(负大)、NM(负中)、MS(负小)、ZO(零)、PS(正小)、PM(正中)、PB(正大)7个模糊集合,隶属度函数如图7所示。
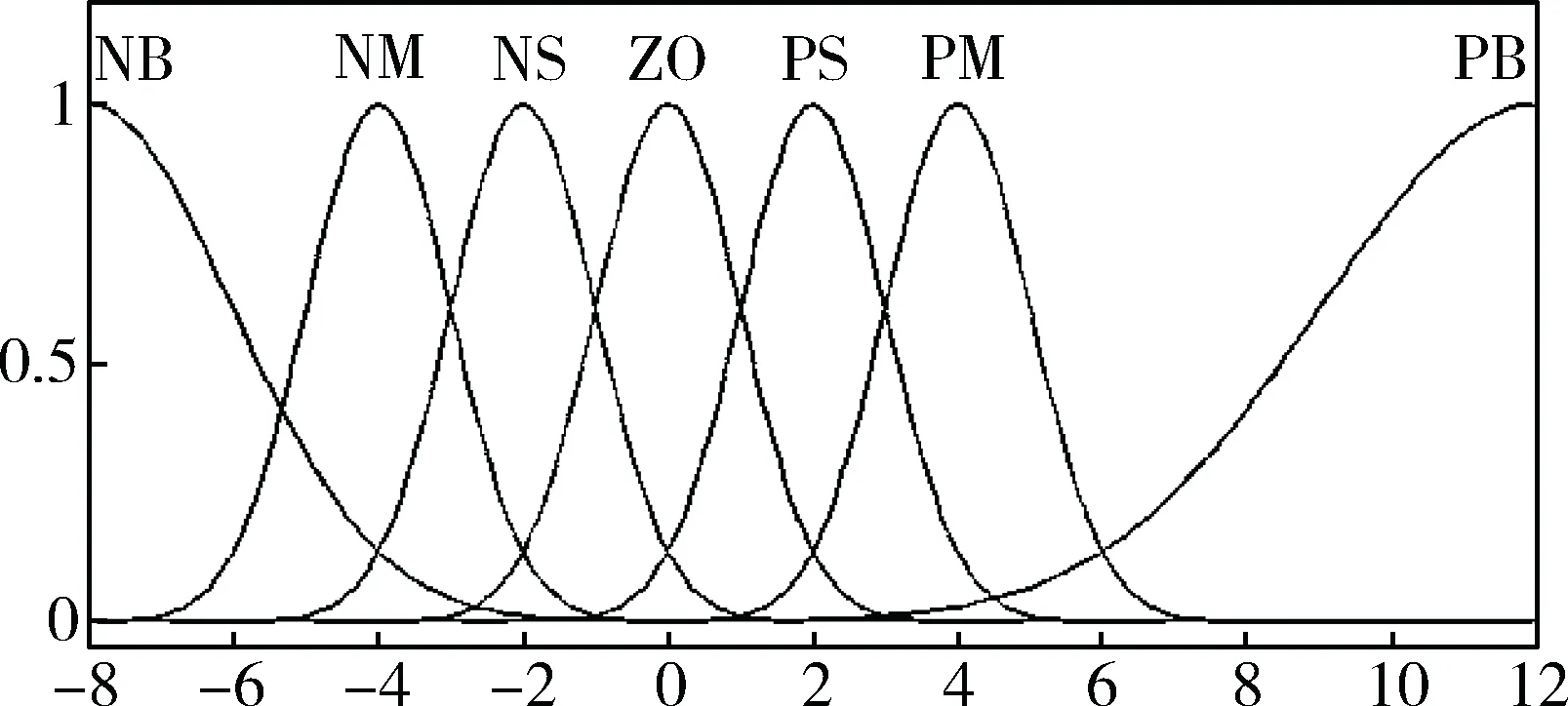
图3 功率误差信号Pe的隶属度函数
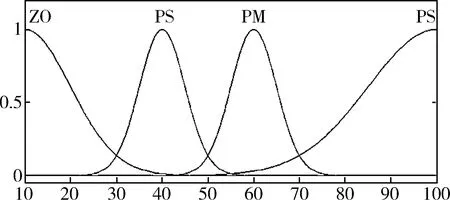
图4 锂电池SOC的隶属度函数
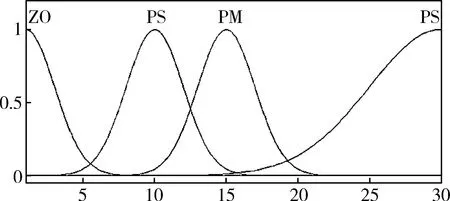
图5 燃料电池氢气压强PH2的隶属度函数
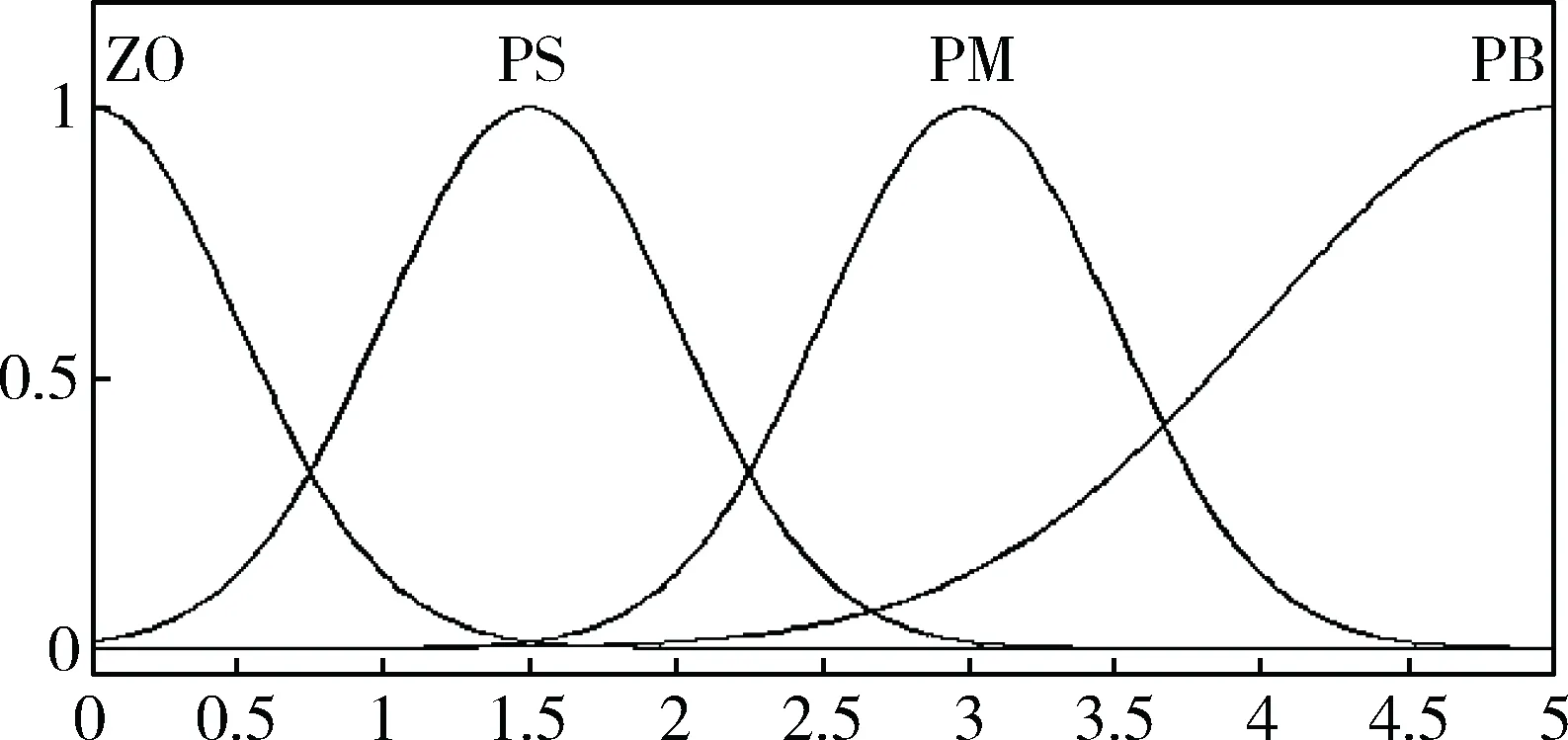
图6 燃料电池输出功率Pfc的隶属度函数
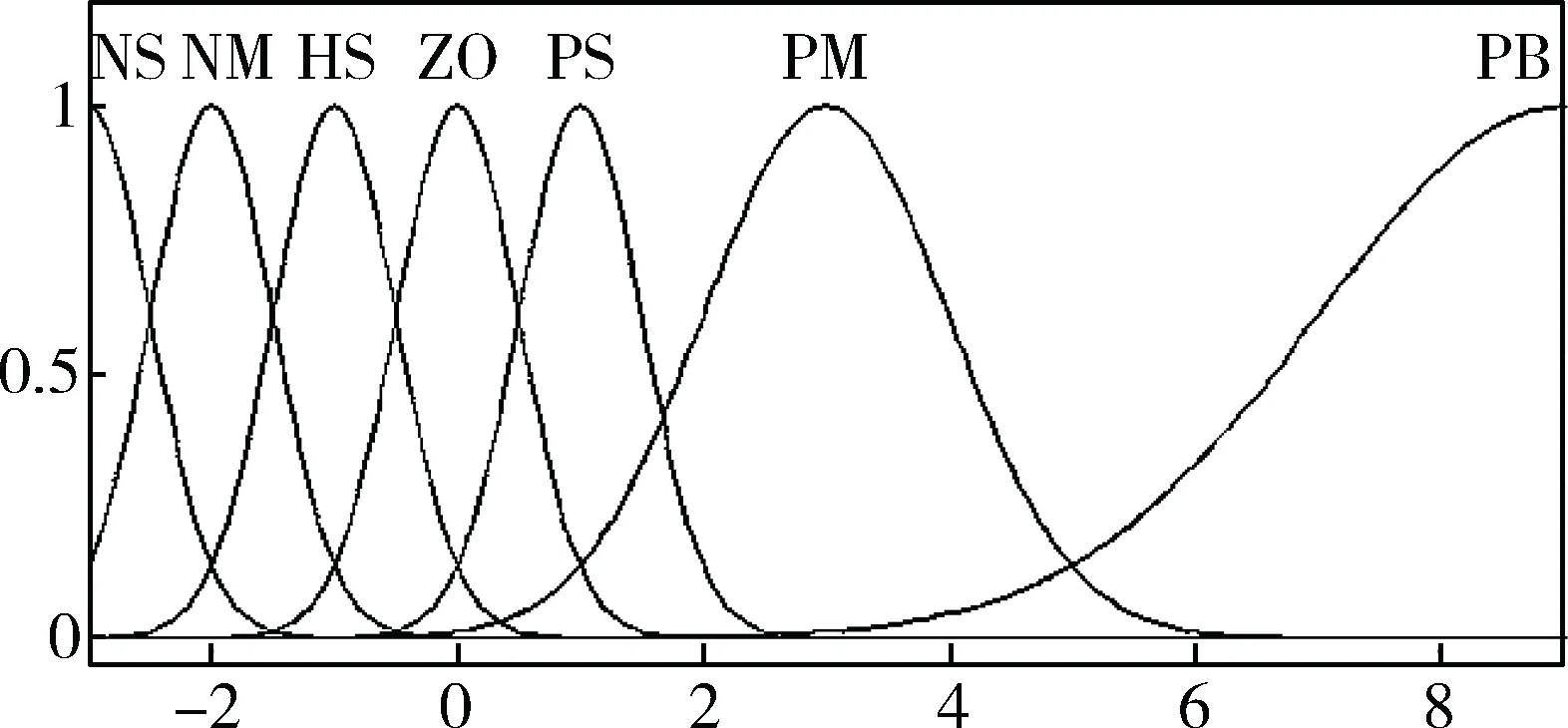
图7 锂电池输出功率Pli的隶属度函数
模糊控制规则由一系列关系词连接而成,最常用的关键词有if-then,also,or和and,确定各模糊输入变量和输出变量的模糊控制规则如表2所示。

表2 模糊控制规则表
3 算法仿真
在MATLAB/Simulink仿真系统中建立无人机混合动力系统整体模型,锂电池为60 Ah/48 V,电池初始荷电状态SOC=70%。无刷直流电机的基本参数为:额定功率3 kW,额定转速1 200 r/min,额定输入电压为48 V,额定电流为60 A,定子电阻为0.2 Ω,转动惯量为0.05 kg/m2,额定转矩为20 N·m。取仿真时间为0~90 min,仿真波形如图8所示。
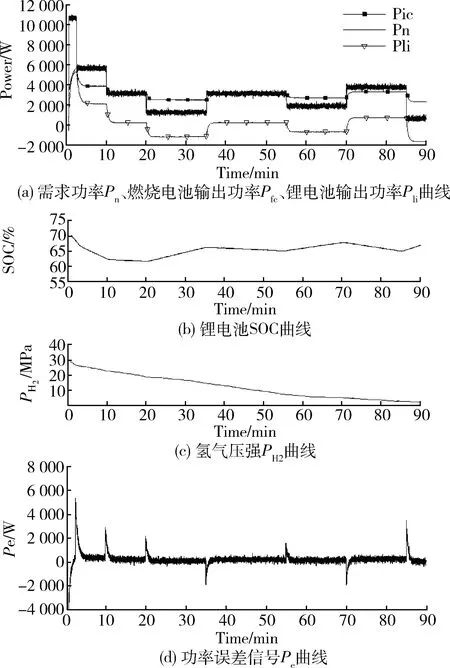
图8 无人机混合动力系统仿真曲线
由图8仿真曲线可知:无刷电机启动瞬间需求功率能达到额定功率的3~4倍,此时燃料电池和锂电池共同输出最大功率以满足负载要求;10~20 min时间内,电机处于平稳工作状态,此时电机需求功率和燃料电池输出功率相当,锂电池不工作;20~35 min时间内,电机处于轻载模式,燃料电池同时对锂电池充电;70~85 min时间内,电机需求功率突然增大,燃料电池输出额定功率,不足部分由锂电池快速补充。在整个90 min仿真时间内,锂电池SOC始终保持在60%~70%范围内,燃料电池氢气压强PH2从初始压强30 Mpa降为3 Mpa,功率误差信号Pe能快速稳定在零值范围内,表明混合动力系统能够满足需求功率快速变化的要求。在整个仿真结束后,该燃料电池混合动力系统仍然有较充足的能量应对突发情况,系统具有较高可靠性,燃料电池和锂电池同时工作于最佳状态。由此可以看出,本文设计的模糊控制能量管理算法可以对燃料电池输出功率、锂电池输出功率进行有效的动态管理,在满足负载功率变化的同时使系统工作在高效区,能有效提高燃料经济性,延长续航时间。
4 控制器实现
本文采用STM32F103作为主芯片设计了如图9所示的能量管理控制器,用于采集燃料电池和锂电池的电压、电流,以及氢气压强信号,并结合飞控系统传输的数据计算出需求功率误差值和锂电池SOC,通过模糊控制算法动态分配燃料电池和锂电池的输出功率,LCD模块将实时显示以上参数的数值和无人机的工作状态。最后对3 kW大疆多旋翼植保无人机进行飞行测试,将原有单一锂电池动力系统改装成燃料电池/锂电池混合动力系统,重量从原来的6 kg增加到10 kg,续航时间从原来的30 min增加到90 min,若按照单位质量内电池所储存的电量来计算,混合动力系统的整体效率比原系统提高了80%左右。

图9 能量管理控制器实现框图
5 结论
本文采用模糊控制算法对多旋翼无人机混合动力系统进行能量管理,相比于逻辑门限控制策略和功率跟随策略更加合理高效,并在此基础上设计了能量管理控制器,经过仿真分析和无人机飞行测试,结果表明:该能量管理策略能够满足无人机动力性能要求,合理调度燃料电池与锂电池的输出功率并使锂电池与燃料电池工作在最佳状态。
[1] 刘莉, 杜孟尧, 张晓辉,等. 太阳能/氢能无人机总体设计与能源管理策略研究[J]. 航空学报, 2016, 37(1):144-162.
[2] SAVVARIS A, XIE Y, MALANDRAKIS K, et al. Development of a fuel cell hybrid-powered unmanned aerial vehicle[C]//2016 24th Mediterranean Conference on Control and Automation (MED), IEEE, 2016: 1242-1247.
[3] 刘乐. 串联混合动力汽车建模与能源管理系统控制策略研究[D]. 长春:吉林大学, 2011.
[4] 郭晋晟. 燃料电池汽车多能源系统优化设计和控制[D]. 上海:上海交通大学, 2008.
[5] 王金龙. 车用质子交换膜燃料电池及其混合动力系统性能研究[D]. 长春:吉林大学, 2007.
[6] 于远彬. 车载复合电源设计理论与控制策略研究[D]. 长春:吉林大学, 2008.
[7] 汪秋婷, 肖铎, 戚伟. 燃料电池混合动力车整车能量管理研究[J]. 电源技术, 2012, 36(10):1459-1462.
[8] HARMON F G, FRANK AA, CHATTOT J J. Conceptual design and simulation of a small hybrid-electric unmanned aerial vehicle[J]. Journal of Aircraft, 2006, 43(5): 1490-1498.
[9] 李延平. 太阳能/氢能混合动力小型无人机总体设计[D]. 北京:北京理工大学, 2014.
[10] 刘金琨. 智能控制[M].第3版, 北京:电子工业出版社, 2014.