视觉信息下移动机器人目标识别算法
2018-01-28逯瑜娇方建军马慧姝
逯瑜娇+方建军+马慧姝
摘要
智能移动机器人的应用目的在于为人类的工作提供帮助,因此构建起类似于人眼识别能力的视觉信息系统是智能移动机器人能否更加直观获取外部信息的关键。在目前的视觉信息研究应用于移动机器人的工程当中,大多依赖于传感系统,利用呈像设备转化真实世界为二维图像,从而丟失了深度信息。本文将从传感系统的角度出发,简要叙述移动机器人视觉信息系统的目标识别算法。
【关键词】智能化 视觉信息系统 移动机器人 目标识别
智能机器人的视觉系统和目标识别现在难以突破的瓶颈在于图像提取和线索的检索之上,以往所应用的方法主要集中在简单的场景当中,机器人通过传感器对重要的信息特征进行提取,从而获取相应的视觉信息。但是一旦到了相对复杂的场景之中,这种图像特征提取的方式就显得十分笨拙,非但对提取信息来说具有不完整的特征,还会造成二维平面图像的数学建模分析无法完成。
1常见的移动机器人目标算法分析
目前在移动机器人的视觉信息系统研究当中,最为常见的目标识别算法包括几何模型算法、外观算法、局部特征算法和三维图像算法等。
1.1四种目标算法的基本情况
l.1.1几何模型算法
机器人应用CMOS相机进行外部信息获取,并转化成为二维图像。具体方法为将三维物体的不同姿态在不同光照之下形成二维平面图像,然后通过机器学习来判断图像当中是否存在目标物。
1.1.2外观算法
该算法所选用的描述图像方法是通过图像当中所具备的兴趣点,来计算出其邻域信息。具体步骤分为特征的提取-匹配特征-模式识别,为了完成匹配和识别,还需要建立额外的庞大数据库。
1.1.3局部特征算法
局部特征需要检测子和描述子两个步骤,对于目标物所具有的差异化特征显著,该方法可以利用不同的单一特征描述来进行匹配特征对,并去除误匹配点。
1.1.4三维图像算法
三维图像算法从灰度图像的数字化分析发展而来,利用非接触式的传感方式,并转化成为数字形式,从而获取目标物当中所具有的像素点的深度信息。
1.2四种目标算法存在的问题
(1)缺乏高质量的原始图像,传感器无法做到完全还原并提高识别精度;
(2)复杂的背景特征和位移变化会对目标特征的具体表现有所影响,而这四种算法并没有能够对变化做出相应的识别调整;
(3)目标算法的应用范围非常狭小,缺少推广。
2利用机器学习的颜色特征实现目标识别的定位算法
2.1特征提取和攝像机成型
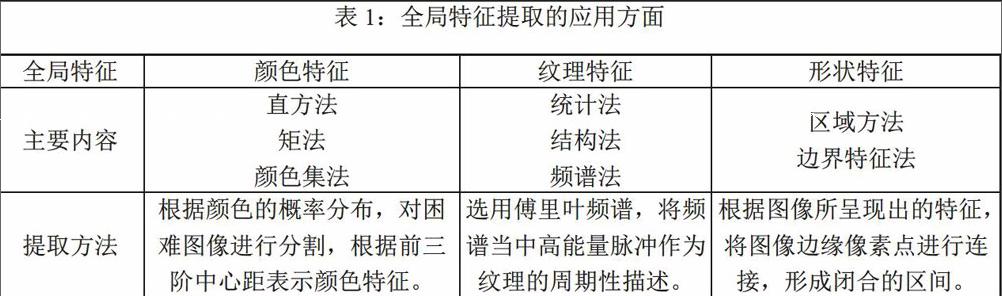
机器学习下的特征提取方法的改良表现在全局特征的提取,除了颜色特征之外,还包含了纹理特征和形象特征,从而更加全面直观地形成视觉信息。其具体方面如表1所示。
而为了实现上述特征描述,并且避免上文中提到的关于目标物发生位移所造成的识别不准确现象,机器人所选用的摄像机系统需要优先进行定义坐标系和转换关系,并将成像过程中像素点的几何参数作为摄像机参数,从而提高摄像机的成像准确性,使成像过程的描述更加具有量化标准。
2.2利用识别算法模型实现地平面约束的单目视觉测距
通过识别算法模型当中的彩色模型建立,从而利用像素阈值的分割和HSV彩色模型相结合使目标图像当中的彩色得以分割成若干部分,并选用最低点来指代目标物的整体特征。在实践当中,本文选用了这种识别算法进行单目视觉的测距,实现了地平面约束的识别模型算法实验。具体的实验方法为三种,其一是处理序列图像,该方法类似人的观察物体中转变视角,形成三维结构的方法,在设定了摄像机的运动信息之后,将运动前后摄像机所捕捉到的两幅图像进行图像相似点匹配,从而实现三维目标的位置测量;其二是透镜成像法,使用
测距模型的建立,并以摄像机的成像平面和焦平面作为模型当中的重要变量,能够在自然光下完成测距工作;其三是几何光学法,对于被测地点的聚焦位置进行估算,在己知的焦距和相距的条件当中,将数据带入到透镜成像的公式当中,经过计算,获得被测地点的具体位置,因此这种方法又被称为“离焦法”或“聚焦法”。
这三种方法在应用过程中各有利弊。其中处理序列法需要将算法转换成为运动恢复结构,加大计算量;而透镜成像法需要优先对摄像机水平垂直两个方向的视角进行分析;几何光学法成本较高,且处理速度缓慢。
3结论
移动机器人的视觉信息系统当中,对于目标识别的算法都离不开摄像机的成像,通过成像的具体情况进行信息获取。但是在获取过程中,由于算法的不同,所导致的特征提取内容也各具差异。颜色特征的提取方法对于移动机器人来说更加全面,相较于以往的算法也更具优势。
参考文献
[1]栾庆磊,赵为松.动背景下帧差分法与边缘信息融合的目标检测算法[J].光电工程,2014,38(10):77-83.
[2]武艳美,肖阳辉.基于特征点匹配的全局运动估计[J].计算机工程,2011,37(22):148-150.
[3]大鹏,程卫平,于盛林.基于帧间差分和运动估计的Camshift目标跟踪算法[J].光电工程,2013,37(01):55-60.
[4]家栋,王建中,王红茹.基于光流的人体运动实时检测方法[J].北京理工大学学报(自然科学版),2014,28(09):794-797.endprint
