介电弹性体无阀微泵设计
2018-01-26郑国华崔春华马小晶
陈 洁,郑国华,崔春华,马小晶
(新疆大学,乌鲁木齐市 830047)
1 前言
无阀微泵利用流体在微尺下的新特性,原理比较新颖,具有更大的发展前景。但目前常见的压电式无阀微泵工艺复杂,成本高昂[1]。
介电弹性体作为一种电场型电致动聚合物(EAP),是一种新型的智能材料。它在外电场的作用下可以产生很大的电致应变,一旦电场撤除,介电弹性体材料能够迅速恢复到其初始的尺寸。同时,介电弹性体材料还具有质量轻(丙烯酸聚合物密度近似1 g/m3),输出应力大(最大应力可达7.2 MPa),响应速度快(响应频率在0.1~20 kHz),质量能力密度高(可高达3.4 J/g),极强的环境适应性(硅树脂薄膜可工作在260 ℃的高温下),耐用性(最高可工作1千万次工作周期,使用寿命超过3年),大柔顺性,好的负载匹配性等优点,这些特点使得它在驱动器应用领域具有其它材料不可比拟的优越性[2]。
本设计中采用VHB4910制备的介电弹性体材料作为无阀微泵的驱动膜,自制锥形介电弹性体作为驱动部件。
2 介电弹性体的加压变形测试
由于橡胶材料初次加载时,会产生应力软化(Mullins效应),本文采用在预拉伸前循环加载5次的方法来减小应力软化对试验误差的影响[3,4]。均匀预拉伸后的VHB4910膜型材料利用其自身黏性粘到中间开直径φ40 mm窗口的绝缘框架上,并在正反两面中心位置涂抹柔性电极材料,最后由导线连接到直流高压发生器上,如图1所示,并将绝缘框架垂直固定到绝缘支座上。

图1 试验单元构成
用数码相机采集加电压前后的图像数据,利用基于OpenCV中cvContourArea函数设计的C程序计算出加电压前后柔性电极区域的面积变化,进而计算出变形量(变形前后面积差与变形前面积之比)。
通过数码相机采集得到加电压前后的图像,如图2所示。

图2 加电压前后DE图像
通过设计的C程序经预处理、灰度化、二值化、轮廓提取翻转后计算出面积[5],得到变形量为149.8%。
3 无阀微泵设计
无阀微泵工作原理如图3所示。本设计采用收缩-扩散型微泵。收缩—扩散型微泵是一种比较典型的无阀微泵,用收缩和扩散的不同形状通道代替了单向阀,并以流道不对称所引起的压力损失的不对称性来实现流体的泵送。微泵的流量取决于2个因素:驱动器的工作频率和泵体的收缩-扩散管的几何尺寸[6]。

图3 无阀微泵工作原理示意
3.1 流道设计
无阀微泵流道设计重点在于扩散管/收缩管的结构设计,锥管参数决定了微泵的流动特性。扩散/收缩结构如图4所示。

图4 扩散/收缩管结构示意α.收缩/扩散角;L .收缩/扩散管长度;h.最小直径
根据流体力学的理论,对扩散/收缩管进行分析,得到了α,L,h对扩散率 ξ 的影响。当α=10 ℃、L=1.2 mm、h= 0.12 mm时,ξ 达到最大值,即流量达到最大[6]。因为ξ的值直接影响微泵的流量,当 ξ 值越大时流量和效率越大,本设计中的收缩/扩散管长度L为5 mm,收缩/扩散角α为10 ℃,最小直径h为1 mm。
收缩/扩散管的扩散率为:
式中 ζd——扩散管流阻系数
ζn——收缩管流阻系数
根据文献[7]可查出 ζd和 ζn的值,从而计算得到扩散率 ξ=4.71。
3.2 泵体几何尺寸的确定
为了得到较高的液体流量,增大了驱动膜的工作频率,但是工作频率的提高使驱动膜的驱动能力和响应速度下降[8]。
设计锥形介电弹性体驱动器来提供驱动膜的振动,无阀微泵的供给模式和泵出模式由驱动膜的振动来实现。图5为锥形介电弹性体驱动器安装后的无阀微泵。锥形介电弹性体驱动器的驱动能力和驱动响应速度比较合适本设计无阀微泵的工作频率,并且z方向产生的位移也较高,使泵的流量更大。

图5 锥形弹性体驱动器安装后的无阀微泵
锥型介电弹性体驱动器在通电后可以产生较大的向下线性位移,产生的最大线性位移约为7 mm,面积变化率为15.49%;断电后又能较快地恢复初始位置[8]。
根据已设定好的收缩-扩散管的尺寸大小,确定微泵总体长度为44 mm,宽度为20 mm,厚度为4.5 mm,上下泵盖的厚度为1 mm,泵体的厚度为2.5 mm。上铜片的厚度为0.7 mm,外直径为17.4 mm。下铜片的厚度为0.3 mm,外直径为18 mm。泵体中间有直径为16 mm的泵腔,两边有2个直径为8 mm的缓冲腔。上泵盖中间有直径为18 mm的打孔,左边是直径为10 mm的进水口,右边是直径为10 mm的出水口,无阀微泵的结构如图6所示。
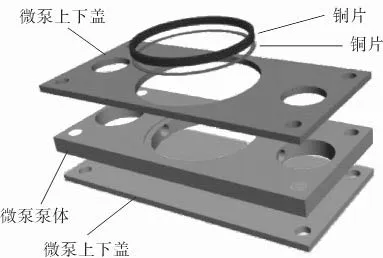
图6 无阀微泵的三维结构
4 流量理论分析和计算
外固定框架的半径R为8 mm,内固定框架的半径r为4 mm,内固定框架的拉升高度为12 mm,变形前后锥形的高度h1,h2分别为5 mm和9 mm。
锥形初始体积为:

加电后锥形的体积为:

泵腔的体积变化量为:

ξ=4.71,泵一个工作周期(设为0.2 s)内的流量为:
泵的效率为:

式中 VT—— 一个周期内从微泵出口流出的液体体积,mL,VT=0.284 mL
5 结语
本文设计了一种介电弹性体无阀微泵。该微泵采用收缩管/扩张管结构,利用自制锥形介电弹性体作为驱动部件。同时对介电弹性体微泵的流量和效率进行了分析,无阀压电微泵一个工作周期(设为0.2 s)内的流量为1.4212 mL/s,效率为0.738。本文设计的无阀压电微泵结构简单,得到了较为理想的流量和效率。
[1] 高晓光,杜立群,吕岩.PZT压电薄膜无阀微泵[J].功能材料与器件学报,2008,14(4) :793-798.
[2] 朱黎辉.电活性介电弹性体膜型材料电致应变特性的研究[D].长春:吉林大学,2011.
[3] Dorfmann A,Pancheri F Q. A constitutive model for the Mullins effect with changes in material symmetry[J].International Journal of Non-Linear Mechanics,2012,47(8) :874-877.
[4] 罗华安,王化明,游有鹏.超弹性膜的等轴拉伸试验方法及仿真[J].华南理工大学学报(自然科学版),2011,39(4):56-61.
[5] 陈洁,李玉麒,郑国华.介电型电活性聚合物应变响应的优化[J].华中科技大学学报(自然科学版),2015,43(10):123-127.
[6] 夏冬梅,庞宣明,陈晓南,等.电致动聚合物驱动的无阀微泵的设计与制作[J].西安交通大学学报,2009,43(7):92-95.
[7] 郭仁宁,孟凡英.流体力学与流体机械[M].北京:中国矿业大学出版社,2010:91-92.
[8] 叶克贝,朱剑英,王化明.锥型介电弹性体驱动器的性能研究[J].机械制造与研究,2009,38(1):15-17.
[9] 魏强,陈花玲.电致动聚合物智能材料分类及其特点[J].传感器世界,2007,13(4):6-10.
[10] 李晓锋,梁松苗,李艳芳,等.仿生材料电活性聚合物“人工肌肉”的研究进展[J].高分子通报,2008(8):134-145.
[11] 王化明,朱剑英,叶克贝,等.介电弹性体线性驱动器研究[J].机械工程学报,2009,45(7):291-296.[12] 朱银龙,王化明,赵东标.介电型电活性聚合物EAP驱动器失效行为分析[J].航空学报,2012, 33(2):347-353.
[13] 夏露.无阀微泵结构优化与仿真研究[D].长春:长春理工大学,2009.
[14] 景素芳,庞宣明,陈晓南.电致动聚合物致动器的动态响应研究[J].西安交通大学学报,2009,43(11):47-50.
