一种九状态重力转弯跟踪模型
2018-01-24叶继坤张涛张金鹏罗绪涛
叶继坤+张涛+张金鹏++罗绪涛

摘 要: 目标运动参数估计方法直接影响导弹的制导精度。 本文对制导参数的估计方法进行了研究, 首先建立速度-转向-爬升坐标系, 基于此坐标系对目标的加速度在三个坐标轴上的分量分别进行估计, 由此将三维问题转化为一维问题来处理; 其次, 基于当前统计模型提出一种九状态重力转弯(Grivity Turning, GT)模型, 利用预解矩阵法对九状态GT模型进行离散化, 同时根据脉冲多普勒雷达导引头的特点, 建立了雷达导引头的观测方程; 最后, 结合UKF滤波算法对制导参数进行估计。 仿真结果表明, 设计的方法对目标机动反应较为灵敏, 具有较好的跟踪稳定性和收敛性, 制导参数的估计精度满足制导律的基本要求。
关键词: 九状态重力转弯模型; 预解矩阵法; 目标跟踪; 扩展卡尔曼滤波
中图分类号: TJ765 文献标识码: A 文章编号: 1673-5048(2017)06-0018-07[SQ0]
0 引 言
目标轨迹的精确跟踪和预测是确保导弹命中目标的前提[1-2]。 机动目标的精确跟踪一直都是一个难题, 最根本的原因在于跟踪滤波采用的目标动力学模型和机动目标实际动力学模型不匹配, 导致跟踪滤波器发散, 跟踪性能严重下降[3-5]。 在实际的拦截过程中, 系统的数学模型都不同程度的存在不确定性, 系统状态测量值中也不可避免地存在观测噪声, 因此, 在导弹制导控制器设计中必须考虑随机因素带来的影响[6]。
目标精确跟踪的关键, 是从观测数据中提取关于目标状态的有用信息, 并应用于估计量的更新, 一个好的目标模型在很大程度上可以使这种信息提取过程更易于实现[3-5]。 Li等在文献[6]中对已经得到广泛应用的通用动态模型进行了综述。 在通用的动态模型中, 按照对机动加速度随机性的刻画方式, 主要有白噪声加速度模型、 Weiner过程加速度模型、 Singer模型和Current模型。 而对高阶目标状态加速度的导数(Jerk)进行建模, 可以改进目标低阶状态的估计精度, 但也要求更高阶的观测信息支持, 比如目标速度。 通用动态模型的局限性在于只能从外部描述目标的运动学状态, 而不能对这些状态进行意义的界定。 在研究大气层内有动力目标的跟踪问题时, Jilkov等提出了一系列用于弹道目标助推段跟踪的动态模型[7]。 文献[8]为提高滤波精度和算法收敛性能, 以粒子滤波算法为基础, 采用交互多模型方法进行状态预测校正, 取得了较好的跟踪效果。 在目标燃料消耗率恒定的假设下, 八状态重力转弯模型和十状态重力转弯模型将目标质量的变化频率作为一维状态变量。 在扩展的十状态重力转弯模型中,
将气动参数纳入状态向量, 得到了较好的跟踪效果。 然而, 大气层内飞机类目标与助推段弹道目标有着不同的特点, 所以使用上述模型跟踪飞机类目标并不合理。 王小虎基于目标螺旋机动和蛇形机动的切向加速度和法向加速度在目标轨迹活动框架上缓变的特点, 提出一种建立在机动目标轨迹活动标架上的动态模型[9]。 该模型克服了直角坐标系和球坐标系上估计目标快变加速度机动延迟大的缺陷, 验证了该方法具有较好的跟踪性和收敛性, 但该状态模型中含有三角函数项较多, 导致状态模型的离散化较为复杂, 在实际工程应用中受限。 文献[10]针对传统的目标估计模型进行了改进, 将目标的加速度转化为三个坐标轴上的分量进行估计, 将三维问题转化为一维问题来处理, 有一定的工程使用价值。
受文献[10]启发, 针对以上模型存在的缺陷和不足, 本文通过建立速度-转向-爬升坐标系, 对目标的加速度在三个坐标轴上的分量分别进行估计, 由此将三维问题转化为一维问题来处理; 同时, 提出一种九状态GT模型, 利用预解矩阵法对九状态动态GT模型进行离散化, 给出雷达导引头的状态观测方程; 最后结合UKF滤波算法对制导律中的制导参数进行估计, 并通过仿真对本文方法的有效性进行验证。
1 目标运动模型
1.1 机动目标运动描述
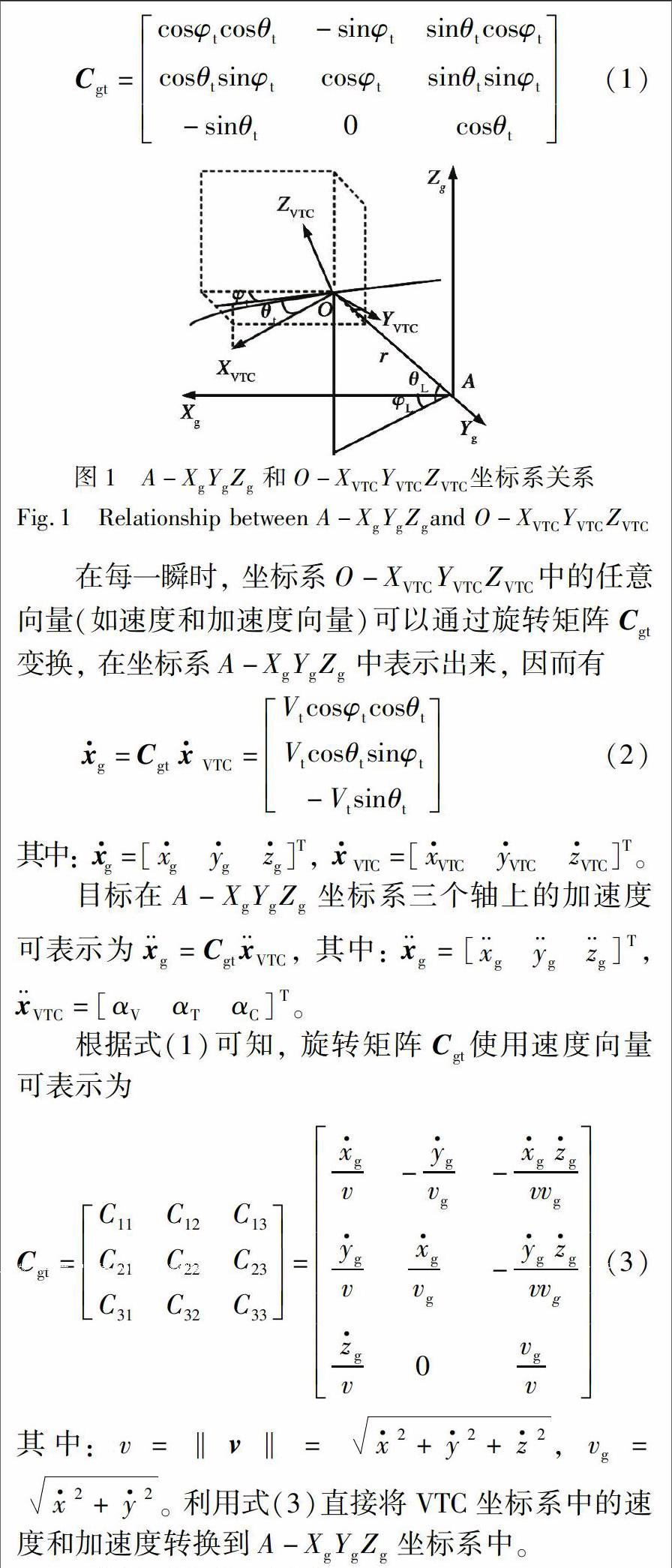
本文主要应用两个坐标系:一个为大地惯性坐标系A-XgYgZg; 另一个为速度-转向-爬升(Velocity-Turn-Climb, VTC)坐标系, 为描述方便, 记为O-XVTCYVTCZVTC。
定义 (VTC坐标系): 原点O取在目标重心处, OXVTC轴与目标速度向量重合, OZVTC选在铅垂平面内与OXVTC轴垂直, 向上为正; OYVTC轴垂直于O-XVTCZVTC平面, 方向由右手坐标系确定。
当AXg轴平行于OXVTC时, AYg和AZg轴分别平行于OYVTC和OZVTC轴。 当目标速度向量相对于A-XgYgZg坐标系有方位角及俯仰角时, 认为坐标系O-XVTCYVTCZVTC相对坐标系A-XgYgZg旋转了角度φt和θt。A-XgYgZg和O-XVTCYVTCZVTC坐标系关系如图1所示。 图1中, r为导弹与目标之间的距离, θL为目标的俯仰角, φL为目标的方位角, θt和φt分别表示目标航迹倾角和航迹偏角。
根据坐标转化关系可知, 坐标系O-XVTCYVTCZVTC到坐标系A-XgYgZg的旋转变换矩阵Cgt, 即
1.2 连续时间状态模型
目标在A-XgYgZg坐标系中的总加速度可表示为
其中: an為目标在A-XgYgZg坐标系中的净加速度, 目标的净过载是指作用在目标上的除重力加速度之外的过载。 为了获取目标在VTC坐标系中的净过载, 提出此“九状态GT模型”。 选择αV, αT, αC以及目标在观测坐标系中的位置xg, yg, zg和速度x·g, y·g, z·g作为状态变量, 即
3 仿真结果与分析
为了更好地验证上述九状态GT模型的性能, 采用数字仿真分析其估计效果。 考虑状态转移方程和观测方程的非线性, 选用UKF滤波器作为求解滤波器[5]。
本文重點是说明采用的模型能够解决跟踪问题, 达到制导律的设计要求, 鉴于研究重点和篇幅, 这里不再与其他模型进行对比, 模型的具体应用与对比详见文献[10],本节重点对估计方法的有效性进行验证。 为简便分析, 认为导弹进入末制导, 并且雷达导引头已经成功捕获目标。 拦截过程中, 假设雷达导引头的距离和相对速度测量误差为40 m和20 m/s, 测角误差为0.005 °, 角速率测量误差为0.01 (°)/s。 假设导弹的初始位置为(0,0,10)m, 速度为1 000 m/s。 目标的初始位置为(10 000, 0, 25 000) m, 速度为500 m/s。 采样周期为0.05 s, 为验证本文提出的九状态GT模型能够在目标大机动情况下对目标实施有效跟踪, 导弹采用比例导引法。 在此针对两种目标机动情形进行仿真。
仿真1:目标做圆弧形机动, 机动加速度大小为50 m/s2;
仿真2:目标做蛇形机动, 机动加速度大小为
仿真中UKF的参数设置为α=0.1, β=2, κ=0。 为增加仿真的可信性, 采用蒙特卡罗方法对两次仿真的脱靶量和拦截时间进行统计, 结果如表1所示。
根据表1可知, 利用本文设计的九状态GT模型, 导弹能够精确命中目标, 脱靶量较小, 制导精度满足地空导弹的拦截要求。 图2和图3绘制了目标位置、 速度以及加速度在VTC三轴上加速度误差统计结果。 在某一时刻tk, 位置误差统计结果用
表示tk时刻rx估计误差的数学期望, 其他类同。 由图2和3可知, 目标位置、 速度和加速度在VTC坐标系三个轴上的加速度误差在拦截的初始段状态估计误差较大, 但随着拦截的进行, 估计误差能够快速收敛到零值附近。 在拦截的初始阶段, 目标在VTC坐标系三个轴上的加速度误差较大, 误差标量值5 m/s2, 但经过大约5 s时间, 误差标量值稳定在零值附近, 这也表明九状态GT模型对目标加速度估计误差较小, 收敛时间较快。 根据图3可以看出, 当目标做蛇形机动时, 在12 s时刻出现估计加速度误差增大现象, 这主要是因为在该时刻目标的机动方向发生突变, 目标加速度由40 m/s2切换为-40 m/s2, 导致估计误差瞬时增大, 但误差幅值不超过8 m/s2, 经过大约2 s, 估计误差快速收敛至零值, 这也从另一方面说明九状态GT模型和UKF算法对目标反应较为灵敏, 能够快速跟踪机动目标。 由目标在惯性坐标系中的位置、 速度误差曲线可知, 九状态GT模型和UKF算法可以使位置、 速度误差快速收敛至零值, 这也是弹目相对运动信息如视线角速率、 相对速度、 相对距离等计算的基础量值。
从以上仿真可知, 目标在空间做复杂机动时, 采用本文设计的九状态GT模型和UKF算法, 可有效估计弹目相对运动信息以及目标在空间的机动信息, 其估计的精度完全满足制导律的导引精度要求, 为工程的实现创造了条件。 此外, 本仿真是基于实验室开发的“制导控制系统辅助论证平台”进行, 实时性和复杂性均能够很好地满足要求, 鉴于论文的篇幅和研究重点, 这里不再对算法的复杂度和实时性进行分析。
4 结 束 语
本文主要研究了制导律中制导参数的自适应估计方法。 通过建立VTC坐标系, 对目标的加速度在三个坐标轴上的分量分别进行估计, 由此将三维问题转化为一维问题来处理; 同时, 提出一种九状态GT模型, 利用预解矩阵法对九状态GT模型进行离散化, 给出可用于滤波的离散化的目标状态模型; 考虑到UKF不仅可以确保滤波的计算稳定, 而且大大减少了实际的计算量, 因此, 结合雷达导引头的观测方程, 依据UKF算法, 实现了制导参数的有效估计。 仿真表明, 本文的估计方法对机动目标加速度突变的响应较为灵敏, 具有较好的跟踪稳定性和收敛性, 可应用于实际工程。
参考文献:
[1] 廖雪阳, 任宏光, 章惠君. 基于重采样粒子滤波的目标跟踪算法研究[J]. 航空兵器, 2016(5): 25-28.
Liao Xueyang, Ren Hongguang, Zhang Huijun. Research on Target Tracking Method Based on the Resampling Particle Filter[J]. Aero Weaponry, 2016(5): 25-28. (in Chinese)
[2] Peng Dongliang, Guo Yunfei. Fuzzy-Logic Adaptive Variable Structure Multiple-Model Algorithm for Tracking a High Maneuvering Target [J]. Journal of the Franklin Institute, 2014, 351(7): 3837-3846.
[3] 郭相科, 刘昌云, 张雅舰, 等. 临近空间高超声速目标跟踪方法研究[J]. 指挥控制与仿真, 2016, 38(5): 8-12.
Guo Xiangke, Liu Changyun, Zhang Yajian, et al. Tracking Algorithms for Near Space Hypersonic Target[J]. Command Control & Simulation, 2016, 38(5): 8-12.(in Chinese)
[4] Fu Jinbin, Sun Jinping, Lu Songtao, et al. Multiple Hypothesis Tracking Based on the Shiryayev Sequential Probability Ratio Test[J]. Science China: Information Sciences, 2016, 59(12): 122306.
[5] 韓崇昭, 朱洪艳, 段战胜, 等. 多源信息融合[M]. 北京: 清华大学出版社, 2006.
Han Chongzhao, Zhu Hongyan, Duan Zhansheng, et al. Multi-Source Information Fusion [M]. Beijing: Tsinghua University Press, 2006. (in Chinese)
[6] Li X R, Jilkov V P. Survey of Maneuvering Target Tracking. Part1:Dynamic Models[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1333-1364.
[7] Jilkov V P, Li X R, Ru J F. Modeling Ballistic Target Motion during Boost for Tracking[C]∥Proceedings of SPIE, Signal and Data Processing of Small Targets, 2007, 6699: 669909.
[8] 张万里,何金刚.交互多模型的Rao-Blackwellized粒子滤波算法在多目标跟踪中的应用[J]. 航空兵器, 2014(4): 3-7.
Zhang Wanli, He Jingang.Maltiple Target Track Based on Interacting Multiple Model Rao-Blackwellized Particle Filter Algorithm[J]. Aero Weaponry, 2014(4): 3-7. (in Chinese)
[9] 王小虎.先进寻的导弹制导、 半实物仿真及相关理论研究[D]. 北京: 北京航空航天大学, 2000.
Wang Xiaohu. Study on Guidance and Hardware-in-the-loop Simulation in Guidance Missile Guidance System [D]. Beijing: Beihang University, 2000. (in Chinese)
[10] 叶继坤.基于微分几何理论的微分几何制导律研究[D]. 西安: 空军工程大学, 2012.
Ye Jikun. Research on Differential Geometric Guidance Law Based on Differential Geometry Theory[D]. Xian: Air Force Engineering University, 2012. (in Chinese)
The Nine State Gravity Turning Model
Ye Jikun1, Zhang Tao1, Zhang Jinpeng2, Luo Xutao2
(1. Air and Missile Defense College, Air Force Engineering University, Xian 710051, China; 2. China Airborne Missile Academy, Luoyang 471009, China)
Abstract: The moving target parameter estimation algorithm affects the guidance precision directly. This paper studies the estimation method of guidance parameters. Firstly, the velocity-turn-climb (VTC) coordinate system is built. Based on this, the components of target acceleration on three axes are estimated, as a result, the problem of the acceleration in three dimensional can be translated into one dimensional problem. Secondly, the nine state gravity turning (GT) model of target maneuvering is proposed based on the concept of current statistics model, and the discretization of state model is calculated using predictive matrix method. Then, according to the characteristics of pulse Doppler radar seeker, the radar seeker measurement model is given. Finally, the UKF filtering algorithm is used to estimate the guidance parameters.
The simulation results show that the designed method is sensitive to the target maneuvering response, and has better tracking stability and convergence. The estimation accuracy of the guidance parameters meets the basic requirements of the guidance law.
