Haptic技术在盲人空间认知和导航服务中应用研究进展*
2018-01-24马建刚郑江华
马建刚, 郑江华
(1.新疆大学 资源与环境科学学院,新疆 乌鲁木齐 830046;2.新疆智慧城市与环境建模高校重点实验室,新疆 乌鲁木齐 830046)
0 引 言
视力受损者在地理环境中,判别方位需要依靠残余视力和其他的感知器官[1,2]。视力缺失为盲人出行带来了极大的认知阻碍[3],致使盲人无法依靠视觉获取周边信息[4],但是依靠其他感知器官获取信息,有可能导致获取的环境信息有所缺失。选择适当的辅助工具,有助于盲人对环境的进一步感知。一般视力受损者会选择导盲杖或者导盲犬来帮助探知周围信息。但是导盲杖只限于对盲人半径1m左右的地面探测,对于和盲人等高或者更远处的障碍物则无法探测;导盲犬需要特殊训练,而且训练周期长,成本较高,不利于普及。为解决上述应用局限,基于Haptic技术加载多种传感器的应用导航服务应运而生,众多学者依据盲人的认知特点,用各种科技手段来实现对盲人的路径诱导,帮助盲人实现功能康复。
Ricky Jacob等人结合Haptic技术考察行人的空间认知能力,采用震动反馈提示已成功引导行人到达目的地,基于Haptic应用移动定位服务(location-based service,LBS)在移动终端的测试结果表明:Haptic技术对行人的反馈是有效的选择,使用不同的震动频率和不同的震动模式可降低用户对环境的认知压力[5,6]。王冠生等人对2012年前基于Haptic与空间认知的盲人路径诱导辅具进行了系统的阐述,总结出近年来盲人导航辅具朝着震动与多种传感器集成、差异性震动的方向发展[7]。随着定位技术与导航技术的飞速发展,2012年至今Haptic技术与空间认知以及与其他盲人路径诱导技术集成应用研究方面均有了较大的进展,推动了盲人导航服务领域出现了新的变化,有必要对新进展进行归纳总结。
1 盲人地理空间认知
关于盲人空间认知的现有研究从心理学、生理学以及脑认知科学等角度解释[8]。从地理学角度阐述盲人空间认知对寻径、环境认知机理,对盲人认知地理环境有重要作用。尤其是基于Haptic的盲人的空间认知状况,在嘈杂环境中对盲人路径诱导有不可替代的辅助效果。因此,本文尝试从地理学的角度对盲人的空间认知进行归纳总结。
王晓明等人结合心理学的研究成果,分别从地理知觉、地理表象、地理概念化、以及地理知识心理表征和地理空间推理五个方面进行了阐述,对地理空间认知从整体到局部,再从局部到整体的角度进行了阐释[9]。鲁学军等人分析了多个空间认知模型,以自下而上的形式对地理空间认知模式进行了分析,总结出了地理空间的一般认知模式[10]。比较上述两个地理空间的认知框架,后者更符合地理空间认知的一般过程。
地理空间有大尺度、中等尺度与小尺度之分[11],与盲人切实相关的是中、小尺度的地理环境,即对空间格局中目标的位置、距离、方位的认知[12]。因此,本文仅讨论中小尺度下的盲人地理空间认知。
1.1 盲人空间认知的表现形式及认知层次
空间认知的表现形式有3种,即感知空间、认知空间、符号空间[10]。这3种认知表现形式的空间尺度逐渐增加,所对应的空间认知层次也相应增加,如表1所示。基于盲人对环境的认知压力和试验的可操作性,大多研究采取对中小尺度的室内外环境测试盲人空间认知。
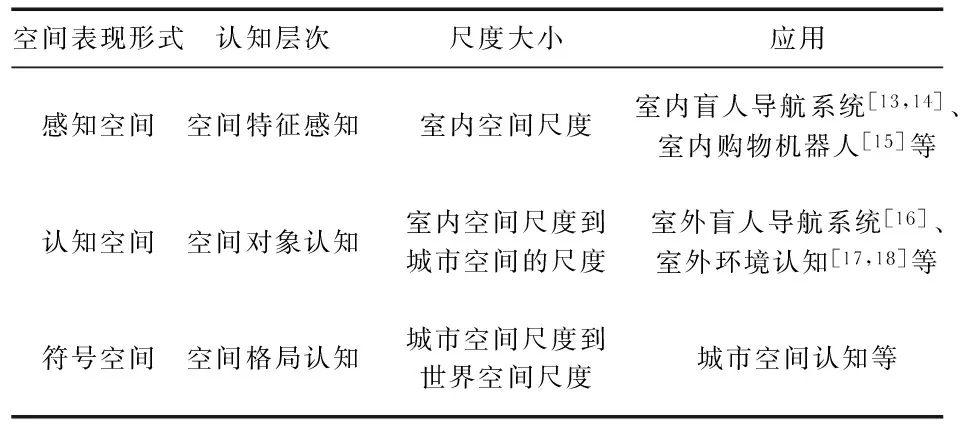
表1 盲人空间认知框架
在中、小尺度下的地理环境认知研究中,谌小猛等人探讨了盲人在熟悉环境和陌生环境中的空间认知表现,认为先天性盲人对路径模型的刻画精度不高,但是采用有效的探路策略可提高认知水平,认知能力强的个体行走也更为有效,后天性盲人认知能力优于先天性盲人[8,19]。国外研究盲人和明眼人对地图描述的精确度来探究盲人的空间认知,发现盲人和视力受损者对地图的表述较明眼人更加精细,但是盲人对地理信息各物体间的信息编码相互独立,对地物之间的相对位置关系把握不够[13]。即盲人无法将空间特征感知上升到空间对象认知的层次,缺乏有效的信息编码手段。在空间对象认知层次,无法将现实世界中认知的地理事物形成具有相对拓扑关系的“心理地图[20]”。
1.2 盲人空间认知的基本单位
空间认知的基本单位分为“空间特征”和“空间对象”,“空间特征”又分为“空间原始特征”和“空间功能特征”,空间原始特征是实体本身所带有的属性,空间功能特征是将空间实体抽象概念化后所具有的属性。盲人对空间物体认知的概念局限于听到、闻到或者感知到,而对物体所具有的纹理、颜色等实体特征可能会有认知上的障碍。空间功能特征对于特定为盲人设置的较易感知,然而现实中大多人造物体为视力正常的人所设定,对特殊群体使用造成了一定的困扰。"空间对象"是对空间实体的主观理解[10],是盲人对认知到的物体在脑海中形成的主观图像。
1.3 盲人空间认知采取的寻路策略
一般而言,明眼人会采取以自我为中心和以非自我为中心两种策略[21]。前者的寻路策略采取行人与地物确定二者之间的相对位置关系,后者的寻路策略采取物体到物体的关系来确定地物的相对位置关系,在实际应用中二者通常会结合使用。研究发现,盲人一般采取以自我为中心的寻路策略[22]。
1.4 认知提示手段
语音提示[23,24]或者震动提示[25,26]方式为引导盲人行走比较常用的提示方式,以提高盲人的空间认知能力,引导盲人用户理解空间信息[27]。震动方式的采用,为盲人在嘈杂环境或者语音提示受到阻碍时提供了一种可行的解决方案,设计的众多盲人导航系统中,多个震动传感器的使用为震动模式提供了多样化的选择。差异性震动方案是嘈杂环境中提示盲人的有效手段[7]。
综上所述,空间认知体系是理论基础,寻路策略是盲人在空间认知方面的具体实践,语音和震动是提示手段。虽然对盲人空间认知从地理学、心理学以及认知神经科学等方面做出多角度的解释,但是从地理学角度对盲人空间认知的研究到目前为止并没有一个完整的理论体系。分析其原因,一方面,可能是研究者采取不同的实验方案与实验设计,得出的结果和结论有所差异[28];另一方面,也有可能是社会对特殊群体的关注度较低。
2 基于Haptic的盲人导航服务
盲人导航服务包括路径诱导与避障两部分。GPS、红外线(infrared)、超声波(ultrasonic wave)、无线射频识别(RFID)、雷达(radar)、蓝牙( Bluetooth )以及超宽带无线通信技术(UWB)等的应用,为盲人出行提供多样化的选择。从导航服务设计角度来说,一方面根据盲人的空间认知状况考虑,另一方面从机器认知的角度设计。在实际应用中,虽然在技术上实现了提示盲人的作用,但是普及率较低,盲人出行依然面临很大的认知压力。本文总结近年基于Haptic的盲人导航服务方面的研究,分别从国内外研究进行了介绍,对其现状以及发展趋势进行了阐述及梳理。
2.1 研究现状
2.1.1 国外研究现状
Bourbakis N在2008年设计了一种机器视觉判别障碍物形状的探测仪。仪器由微型电脑、3D摄像机、2D震动马达阵列组成。其原理是3D摄像头探测到障碍物后,由2D震动马达阵列将探测到的障碍物以震动的形式告知盲人,未震动区域则对应实际环境中的无障碍物区域[29]。这种提示方式可将现实环境中3D物体提取为2D形状,以震动阵列帮助盲人感知障碍物的形状与所在位置,但是系统结构复杂,穿戴繁琐,不易于推广使用。
Mann S等人在2011年将6个震动马达嵌入到头盔中,用摄像机帮助盲人感知环境,该套系统的有效探测距离为0.3~6 m,并且距离障碍物越近,震动越强烈[30]。设备可检测到障碍物的方位,但不可检测障碍物大小,震动马达集成于头盔上,用户体验不友好。
Scheggi S等人在2014年设计了一种基于震动的远距离盲人引导系统,由摄像机和一对震动传感器组成,震动由人工远程控制,震动周期为0.4 s,当需要提示盲人时,震动周期变为0.2 s[31]。该系统为持续震动模式,探测到障碍物后震动频率变高,对于用户来说容易产生认知疲劳,提示方式为人工监测,未实现自动化处理。
Mahmud N等人在2014年用3组超声波探测仪和3个震动马达设计了一种帮助盲人探障的导航系统。三组超声波对应着3个震动马达,当探测到距离障碍物50~70 cm时,震动马达低速震动提醒;当距离障碍物30~50 cm时,震动马达中速震动提醒;探测到距离障碍物小于30 cm时,震动马达急速震动提醒[32]。也有人将3个超声波传感器集成到导盲杖上探测障碍物,在手柄处集成震动马达,使用震动提示障碍物[33]。使用多个传感器可准确判别障碍物的方位,采用差异性震动提示可告知盲人障碍物的距离,给盲人安全行走提供了保障。
Cosgu A等人在2014年设计了一种带有8个震动马达的腰带的盲人引导系统,该8个震动马达分别指示8个不同的方位,而且震动组合也较多,一个马达震动时仅指示一个方位,如东、西、西北等,如果震动马达相继震动(跑马灯式震动),则指示盲人朝指定方位转向[34]。多个震动马达的组合提供了多种震动组合,集成在腰带兼具实用性与隐蔽性,为盲人路径诱导提供了更为精确的方向引导。马达单点震动较易被接受,跑马灯式震动给试验者带来不适的体验。
2.1.2 国内研究现状
赵银平等人在2011年设计了一种盲人行走助手,超声波传感器和红外传感器结合使用,用单片机控制各传感器,传感器探测到障碍物或者凹洼处,行走助手以震动提示盲人,并加入夜间行走模式,在晚上盲人可打开LED灯,并用蜂鸣提示过路行人,保障盲人安全[35]。此设备集成了多种传感器,加载夜间行走模式,从盲人角度和外部环境两方面设计考虑,保护盲人出行安全。
王冠生等人在2012年基于Android平台,采用智能手机,结合google地图,采用差异性震动模式为盲人提供路径诱导服务。在路口等关键节点采用不同的震动模式,指引盲人到达目的地[36]。但目前google地图在国内已经无法使用,采用高精度地图和差异性震动技术来为盲人提供路径诱导服务,成为盲人最强烈的现实需求。
相关研究还包括对盲人行走中遇到水进行震动提示[37],使用震动提示来帮助盲人寻物[38],采用鞋垫前脚掌位置安装震动器,并连接导航仪,帮助盲人实现路径导航[39],结合北斗定位系统,采用震动提示来为盲人提供障碍物报警功能[40]。对水迹的探测和寻物的功能,以震动提示为盲人提供了更加细致的服务需求;结合全球导航卫星系统(GNSS)提供路径诱导,是盲人探测外界陌生环境的必要条件,差异性震动对障碍物和路径诱导的提示,更为盲人在语音提示受到干扰时,提供了更为多样的反馈选择。
2.2 基于Haptic的盲人导航服务的特征与发展趋势
1)集成化。导航器具设计时,单个传感器往往无法满足盲人对实际环境高精度与实时的反馈要求。因此,多个传感器的使用可提高对环境探测的范围。功能单一的传感器只能对环境中某类特定的物体有效,所以根据盲人以及导航器具的功能需求,加载多种传感器,可多方位为盲人提供障碍物探测与路径诱导服务。
2)震动提示。上述的盲人导航服务均采用震动作为辅助提示手段,当遇到障碍物时以震动的形式提示盲人,虽有采用差异化的震动提示,但是对震动提示的时间长短、震动强度,没有结合盲人的心理认知状况具体分析。
3)定位精度。现有导航系统的定位精度达到了亚米级,定位误差在10 m左右。但是对盲人来说,定位授时时间较长,而且定位误差满足不了盲人对高精度定位的需求。超宽带定位技术(UWB)的出现解决了盲人对高精度定位的现实需求,该技术的定位精度可达10~20 cm,并且可实时定位,对定位的响应速度也满足盲人对高精度定位与实时定位的要求,已有学者引用该技术对盲人进行室内定位与路径导航[41,42]。高精度定位的出现不仅满足特殊人群的需求,也可能是未来定位导航的发展趋势之一。
4) 微地图/精细地图的应用。地图内容主要由数学要素、地理要素、整饰要素组成。盲人对地图的使用除数学要素这个隐形要素外,对地理要素的感知、对整饰要素的信息获取均不可见,为盲人使用地图造成很大困扰。近几年对室内地图、地铁站等微地图的研究也有较大发展,但是与盲人的实际需求仍有较大的差距。盲人在实际环境中行走,需要对以自身为中心的地理环境有精准的描述。因此,对微地理环境的建模,丰富精细地图对盲人的引导功能,具有重要意义。3D 地理信息系统(geographic information system,GIS)的出现为实现上述功能实现提供了可能,在实际应用中,3D GIS主要应用在应急响应[43]、交通管理[44]、矿产资源调查[45]等方面,对盲人路径诱导的微地图/精细地图的应用仍有发展空间。
近年来技术的进步与发展,采用了多种手段提高盲人空间认知水平。从起初测试盲人导航系统的可用性、有效性向着可靠性、稳定性等方面发展;基于触觉和听觉的提示方式也从单通道向着多通道的模式发展;在系统设计中,不单单依靠硬件设施,还加入了路径规划和优化算法,系统更加的智能化、集成化;盲人导航系统的功能不再是单一的导航或者避障,而是将针对盲人面临现实困难的多种解决办法融入到同一个系统中,兼具实用性与人性化。
2.3 面临的挑战
近些年来,基于Haptic的盲人导航服务虽然发展速度较快,但是真正普及使用的少之又少,其原因是一些科学问题依然亟待解决。
1) 环境实时检测。尽管设计了许多针对路径导航的功能,并且加入了障碍物探测的功能,但是并没有加入实际环境中,诸如人流、车流等环境动态变化突发状况的预警机制。面对外界环境的突发状况,现有的导航系统并不能给出更好的解决方案。
2) 认知疲劳。语音和震动对人体的持续刺激会产生认知疲劳,也会导致认知能力的下降。需要解决盲人长期使用语音或者震动提示方式感到疲劳的问题。
3) 盲人空间认知研究。导航系统设计的目的为寻径和避障,而对盲人空间格局的认知机理,到目前为止研究成果虽多,但是没有形成完整的理论体系,因此,针对盲人的导航系统在功能方面大多只侧重于导航与避障。
4) 盲人与地理环境的交互。盲人认识地理环境,获取地理环境格局的能力,以及地理环境对盲人空间认知的反馈,对盲人的出行有至关重要的作用。帮助盲人快速高效认识地理环境,地理环境中各要素呈现给盲人,可有效减少盲人走弯路,偏离路线等情况的出现。
3 结束语
本文从盲人空间认知的研究现状、以及基于Haptic盲人导航服务的应用进行了阐述和总结。基于Haptic的盲人导航服务向着多种技术手段融合应用和功能多样化的方向发展;震动提示从单个单模式向着多组多模式的方向发展;从粗略地图导航向着精细地图导航的方向发展。到目前为止,关于盲人的空间认知,路径诱导中对盲人偏离路径的容忍程度仍需讨论;对震动提示,只是作为一种提示手段,对差异性震动提示仍未做深入研究;路径导航中,在距离路口什么位置提示,何时提示仍然值得探讨。
[1] Gallo S,Chapuis D,Santos-Carreras L,et al.Augmented white cane with multimodal haptic feedback[C]∥2010 the 3rd IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob),IEEE,2010:149-155.
[2] 沈剑辉.试谈盲生的方位辨别[J].现代特殊教育,2003(1):32-33.
[3] 王小伟.基于 RFID 的盲道识别系统设计 [D].成都:成都理工大学,2009.
[4] 陈 旻,刘德儿,林 珲.从地理信息系统角度探究盲人户外导航的几个关键问题[J].地球信息科学学报,2014,16(4);553-559.
[5] Jacob R,Shalaik B,Winstanley A C,et al.Haptic feedback for passengers using public transport[C]∥International Conference on Digital Information and Communication Technology and Its Applications,Berlin Heidelberg:Springer,2011:24-32.
[6] Jacob R,Winstanley A,Togher N,et al.Pedestrian navigation using the sense of touch[J].Computers,Environment and Urban Systems,2012,36(6):513-525.
[7] 王冠生,郑江华,瓦哈甫·哈力克,等.基于Haptic技术的盲人路径诱导辅具应用研究现状[J].传感器与微系统,2013,32(4):1-4.
[8] 谌小猛,刘春玲,乔福强,等.盲人建构陌生环境空间表征的策略及其作用[J].心理学报,2016,48(6):637-647.
[9] 王晓明,刘 瑜,张 晶.地理空间认知综述[J].地理与地理信息科学,2005,21(6):1-10.
[10] 鲁学军,秦承志,张洪岩,等.空间认知模式及其应用[J].遥感学报,2005,9(3):277-285.
[11] Schinazi V R,Thrash T,Chebat D.Spatial navigation by congenitally blind individuals[J].Wiley Interdisciplinary Reviews Cognitive Science,2016,7(1):37-58.
[12] 柳佳佳,葛 文.实景地图的空间认知研究[J].测绘工程,2015(3):6-10.
[13] Ungar S,Blades M,Spencer C.Strategies for knowledge acquisition from cartographic maps by blind and visually impaired adults[J].Cartographic Journal,1997,34(2):93-110.
[14] 洪 菲.基于RFID射频识别的室内导盲系统的研究[J].福建电脑,2009,25(6):97-98.
[15] 罗 阳.室内助行机器人的导航研究[D].哈尔滨:哈尔滨工业大学,2014.
[16] Hakobyan L,Lumsden J,O'Sullivan D,et al.Mobile assistive technologies for the visually impaired[J].Survey of Ophthalmology,2013,58(6):513-528.
[17] Sammouda R,Alrjoub A.Mobile blind navigation system using RFID[C]∥Computer & Information Technology,IEEE,2015.
[18] Chen M,Lin H,Liu D,et al.An object-oriented data model built for blind navigation in outdoor space[J].Applied Geography,2015,60:84-94.
[19] 谌小猛,刘春玲.视觉经验缺失对盲人熟悉环境空间表征的影响[J].中国特殊教育,2015(1):39-46.
[20] 谌小猛,刘春玲.计算机虚拟技术训练辅助盲人构建空间表征之研究[J].心理科学,2015,38(6):1319-1325.
[21] Shelton A L,Mcnamara T P.Systems of spatial reference in human memory[J].Cognitive Psychology,2001,43(4):274-310.
[22] Achille P,Mary Jane S,Jansari A S,et al.Visual experience facilitates allocentric spatial representation.[J].Behavioural Brain Research,2013,236(1):175-179.
[23] Yang R,Park S,Mishra S R,et al.Supporting spatial awareness and independent way finding for pedestrians with visual impairments[C]∥Proceedings of the 13th International ACM SIGACCESS Conference on Computers and Accessibility,ACM,2011:27-34.
[24] Andreou Y,McCall S.Using the voice of the child who is blind as a tool for exploring spatial perception[J].British Journal of Visual Impairment,2010,28(2):113-129.
[25] Wang Y,Kuchenbecker K J.HALO:Haptic alerts for low-hanging obstacles in white cane navigation[C]∥2012 HAPTICS Sympo-sium,IEEE:527-532.
[26] Kim Y,Harders M,Gassert R.Identification of vibrotactile patterns encoding obstacle distance information[J].IEEE Transactions on Haptics,2015,8(3):298-305.
[27] Cosgun A,Sisbot E A,Christensen H I.Evaluation of rotational and directional vibration patterns on a tactile belt for guiding visually impaired people[C]∥2014 IEEE Haptics Symposium (HAPTICS),367-370.
[28] Millar S.Models of sensory deprivation:The nature/nurture dichotomy and spatial representation in the blind.[J].International Journal of Behavioral Development,1988,11(1):69-87.
[29] Bourbakis N.Sensing surrounding 3D space for navigation of the blind.A prototype system featuring vibration arrays and data fusion provides a near real-time feedback.[J].IEEE Engineering in Medicine and Biology Magazine,2008,27(1):49-55.
[30] Mann S,Huang J,Janzen R,et al.Blind navigation with a wearable range camera and vibrotactile helmet[C]∥ACM International Conference on Multimedia,ACM,2011:1325-1328.
[31] Scheggi S,Talarico A,Prattichizzo D.A remote guidance system for blind and visually impaired people via vibrotactile haptic feedback[C]∥Proc of Mediterranean Conf on Control & Automation,2014:20-23.
[32] Mahmud N,Saha R K,Zafar R B,et al.Vibration and voice operated navigation system for visually impaired person[C]∥International Conference on Informatics,Electronics & Vision,2014:1-5.
[33] Menikdiwela M P,Dharmasena K M I S,Abeykoon A M H S.Haptic-based walking stick for visually impaired people[C]∥International Conference on Circuits,Controls and Communications,2013:1-6.
[34] Cosgun A,Sisbot E A,Christensen H I,et al.Guidance for human navigation using a vibro-tactile belt interface and robot-like motion planning.[C]∥International Conference on Robotics and Automation,2014:6350-6355.
[35] 赵银平.低视力者及盲人安全前行导航帮手[J].数字技术与应用,2011(9):31-32.
[36] 王冠生,郑江华,瓦哈甫·哈力克,等.基于Haptic技术的盲人辅助路径诱导服务研制[J].电子技术应用,2012,38(5):145-148.
[37] 于艳杰,倪妍君,侯瑞方.一种多功能盲人拐杖:中国,CN202136542U[P].2012—01—02.
[38] 鞠 文,尹慧慧,崔冬晓,等.一种盲人寻物辅助定位装置:中国,CN203870777U[P].2014—01—02.
[39] 涂正洪.一种连接导航仪的导盲鞋:中国,CN204293456U[P].2015—01—04.
[40] 张志军,罗 彬,王岩辉.具有北斗定位的全方位探测智能导盲杖:中国,CN202802088U[P].2013—01—02.
[41] Riehle T H,Lichter P,Giudice N A.An indoor navigation system to support the visually impaired∥2008 the 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society,IEEE,2008:4435-4438.
[42] Martinez-Sala A S,Losilla F,Sánchez-Aarnoutse J C,et al.Design,implementation and evaluation of an indoor navigation system for visually impaired people[J].Sensors,2015,15(12):32168-32187.
[43] Kwan M P,Lee J.Emergency response after 9/11:The potential of real-time 3D GIS for quick emergency response in micro-spatial environments[J].Computers,Environment and Urban Systems,2005,29(2):93-113.
[44] Li X,Lu Z,Zhang B,et al.Traffic management and forecasting system based on 3D GIS∥2015 the 15th IEEEACM International Symposium on Cluster,Cloud and Grid Computing (CCGrid),IEEE,2015.
[45] Xiao K,Li N,Porwal A,et al.Geostatistical and Geospatial Approaches for the Characterization of Natural Resources in the Environment[M].Berlin:Springer International Publishing,2016:735-740.