基于改进SURF算法的机器人识别匹配方法
2018-01-19王一璋王亚刚
王一璋 王亚刚
摘要:由于传统SURF匹配算法选取大量不符合预期的特征点,增加了后期匹配運算时间,导致不能满足工业级应用快速性的要求。提出一种改进的SURF算法,首先对摄像头获取的目标图像进行均值滤波处理,然后选择合理阈值、运用Canny算子对获取的目标图像进行边缘检测,再通过Hessian矩阵获取图像局部最值,并利用SURF算法对边缘图像进行匹配。仿真结果表明,该SURF算法在应用于工业机器人目标识别匹配时,既能减少匹配时间,又可以提高匹配准确度。
关键词:Canny边缘检测;SURF算法;图像匹配;目标识别
DOIDOI:10.11907/rjdk.181630
中图分类号:TP301
文献标识码:A 文章编号:1672-7800(2018)010-0014-04
英文摘要Abstract:Traditional SURF matching algorithm tends to pick a large number of feature points that do not meet expectations, which prolongs the time of matching operation later, leading to the inability to meet the requirements of rapidity in industrial applications. To solve this problem, an improved SURF algorithm was proposed in this article. Firstly, the target image acquired by the camera is subjected to mean filtering processing, then the reasonable threshold is selected to use the Canny operator to perform edge detection on the acquired target image. Furthermore the local maximum value of the image is obtained by Hessian matrix, and the edge image is matched by SURF algorithm. Experimental results show that the improved SURF algorithm can not only reduce the matching time but also improve the matching accuracy when it is applied to target recognition and matching of industrial robots.
英文关键词Key Words:Canny edge detection; SURF algorithm; image matching; target recognition
0 引言
随着“中国制造2025”战略的提出,机器人产业在中国飞速发展。十三五规划指出,在工业机器人方面,要重点发展智能工业机器人、人机协作机器人、服务机器人等一系列产品,对机器人视觉系统提出了更高要求。
基于机器视觉的图像匹配是机器人系统重要组成部分。近年来,国内外已有较多研究。David Lowe教授[1]提出了SIFT算法,该算法特征信息量多,适合在大量数据信息中进行准确匹配,但该匹配算法对旋转、尺度缩放、亮度变化不敏感,且由于匹配信息众多,因此该算法匹配时间较长。刘佳、傅卫平等[2]通过对图像进行多分辨率小波变换改进SIFT算法,该方法提高了SIFT匹配算法的鲁棒性,但对匹配图像要求较高,当图像中目标表面较光滑时,特征匹配点数量较少。朱奇光、王佳等[3]提出一种利用改进Gaussian-Hermite矩的SURF算法进行图像匹配,通过双树复小波变化减少图像噪点。该方法减少了不稳定特征点匹配数目,提高了匹配准确性,但由于双树复小波变化本身会出现频率混叠现象,使提取的特征信息不准确。
基于以上分析,本文提出了一种改进的SURF图像匹配算法应用于工业机器人视觉匹配[4]。对于传统SURF算法检测到的不稳定特征点较多,导致多余无用计算延长匹配时间的弊端,本文算法首先对原图像进行均值滤波处理,去除噪声影响[5];接着对滤波图像进行Canny边缘检测操作,得到原图轮廓信息,降低算法复杂度,通过Hessian矩阵获取轮廓图像局部最值;最后运用SURF算法进行图像匹配[6-7]。实验结果表明,本文算法能够有效减少提取的错误特征点数目,并提高了工业机器人对目标图像的匹配速度[8]。
1 工业机器人抓取系统构建
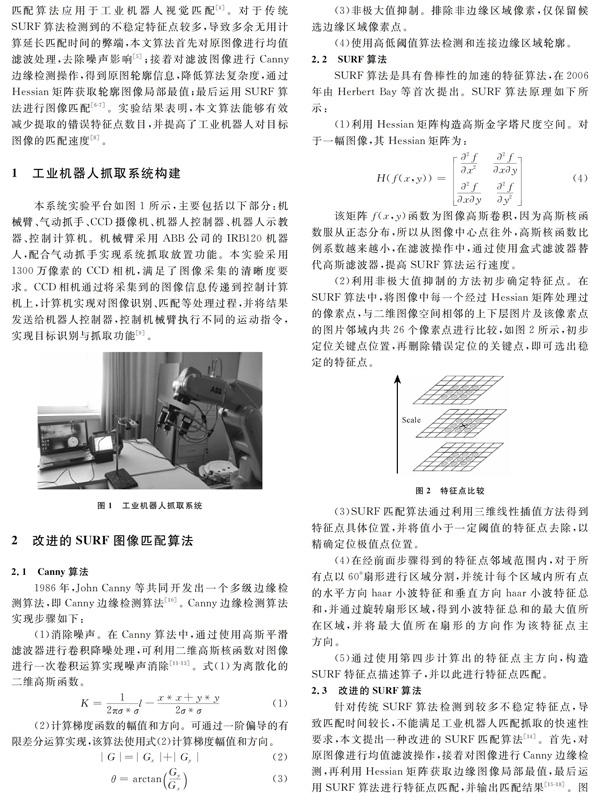
本系统实验平台如图1所示,主要包括以下部分:机械臂、气动抓手、CCD摄像机、机器人控制器、机器人示教器、控制计算机。机械臂采用ABB公司的IRB120机器人,配合气动抓手实现系统抓取放置功能。本实验采用1300万像素的CCD相机,满足了图像采集的清晰度要求。CCD相机通过将采集到的图像信息传递到控制计算机上,计算机实现对图像识别、匹配等处理过程,并将结果发送给机器人控制器,控制机械臂执行不同的运动指令,实现目标识别与抓取功能[9]。
从表2数据可以看出,本文改进SURF算法较传统SURF算法减少了总匹配点数,不稳定的匹配点数目占主要部分,因而提高了匹配正确率,缩短了无用计算匹配时间,使总匹配耗时大大降低。
4 结语
本文提出了一种改进的SURF图像匹配算法。通过利用均值滤波和Canny边缘检测,能够有效减少SURF算法匹配到的错误特征点数目,既提高了匹配准确性,又减少了匹配时间,对SURF算法在工业机器人快速匹配中的应用有一定参考意义。同时,本文算法基于Opencv开源视觉库开发,通用性强。但本文实验工件表面形状规则,有利于特征点提取,对于本文算法是否适用于形状复杂的工件,还有待研究。
参考文献:
[1] LOWE D G. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004,16 (2):91-110.
[2] 刘佳,傅卫平,王雯,等.基于改进SIFT算法的图像匹配[J].仪器仪表学报, 2013, 34(5):1107-1112.
[3] 朱奇光,王佳,张朋珍,等. 基于高斯矩改进SURF算法的移动机器人定位研究[J].仪器仪表学报, 2015,36(11):2451-2457.
[4] 郑南宁.计算机视觉与模式识别[M].北京:国防工业出版社, 1998.
[5] 冯亦东,孙跃.基于SURF特征提取和FLANN搜索的图像匹配算法[J].图学学报,2015,4(36):650-654.
[6] BAY H, ESS A,TUYTELAARS T, et al. Speeded-up robust features [J]. Computer Vision and Image Understanding, 2007,30(3):346-359.
[7] 陈谦,吴清.基于显著区域检测的SURF特征匹配优化算法[J].软件导刊, 2017,16(3):22-26.
[8] SHANG J,CHEN C B,TANG H.Object recognition using rotation invariant local inary pattern of significant bit planes[J]. IET Image Processing,2016,10(9):662-670.
[9] 陳钊,赵玉清,杨陆强,等.基于OpenCV的精量喷雾图像处理技术[J].农机化研究,2018,40(6):194-199.
[10] 张玲艳.基于Canny理论的自适应边缘检测方法研究[D].西安:西北大学,2009.
[11] 王小俊,刘旭敏,关永.基于改进Canny算子的图像边缘检测算法[J].计算机工程,2012,38(14):196-198.
[12] 许宏科,秦严严,陈会茹.一种基于改进Canny的边缘检测算法[J].红外技术,2014,36(3):210-214.
[13] 赵岩,周百灵,陈贺新.一种改进的基于Canny算子边缘检测算法[J].吉林大学学报:理学版,2012,50(4):740-744.
[14] 冯娟,刘刚,王圣伟,等.采摘机器人果实识别的多源图像配准[J].农业机械学报, 2013,44(3):197-203.
[15] 杨丽凤.面阵CCD高精度测量应用技术[D].太原:太原理工大学,2002.
[16] 刘萍萍,赵宏伟,臧雪柏,等. 移动机器人定位图像匹配的快速局部特征算法[J].仪器仪表学报, 2009,30(8):1714-1719.
[17] 陈卫东,张兴家,朱奇光,等.基于混合特征的移动机器人图像匹配算法[J].中国机械工程, 2015,26(9):1137-1141.
[18] 赵德安,刘晓洋,陈玉,等. 苹果采摘机器人夜间识别方法[J].农业机械学报,2015,46(3):15-22.
[19] 王福斌,李迎燕,刘杰,等.基于OpenCV的机器视觉图像处理技术实现[J].机械与电子,2010,28(6):54-57.
[20] KAEHLER A, BRADSKI G.Learning OpenCV:computer vision in C++ with the OpenCV library[J].Oreilly Media,2016,34(5):1681-1682.
[21] 张进猛, 张进秋.基于OpenCV的图像采集和处理[J].软件导刊,2010,9(1):164-165.
(责任编辑:江 艳)
