三维压电微动平台的结构设计与实验测试
2018-01-19刘文翠
岳 强 ,刘文翠 ,张 研
(1.浙江纺织服装职业技术学院 机电与轨道交通学院,浙江 宁波 315211;2.迁安首信自动化信息技术有限公司,河北 迁安064400;3.浙江纺织服装职业技术学院 雅戈尔商学院,浙江 宁波 315211)
1 引言
随着技术的进步和科技的发展,微/纳米在各个工程领域的迅猛发展,人类社会的发展基本步入了纳米时代,微纳米技术扩展到各个领域。在微纳米技术中,最常见的机构就是微动平台,它是一种行程小、精度高、分辨率高的微动机构。如:在精密与超精密机械切削加工中,微动平台可以应用为微进给或误差补偿装置,实现刀具的微纳米进给或加工误差的精密补偿[1];在MEMS中,微动平台配合微动夹钳相用于微米乃至纳米级机械零件的装配或维修[2];在扫描探针显微镜中,微动平台与微探针、微夹钳配合使用,用于进行样品表面形貌测量,以及对原子内部进行分离操作或移植[3]。
鉴于微动平台的诸多特点,需要多多借鉴微动平台的优点,如文献[4]研制的x-y-θ微动平台,该平台采用柔性薄板结构,通过压电执行器驱动配合电磁夹紧机构实现蠕动式进给,可获得了3个自由度;文献[5]研究并制造出一种柔性平板式二维平台,通过对微动平台的静、动态特性进行了实验测试,实验结果表明微动平台的定位精度达到了纳米级,一阶模态与二阶模态的固有频率分别为495.7Hz和521.8Hz;文献[6]用双圆弧柔性薄板结构,采取拓扑优化设计方法和有限元分析法相结合的方式,研制出二维并联压电微动平台,沿x、y方向能够实现的位移分别为22.67μm、23.26μm,最大固有频率约为1.35kHz;文献[7]应用通过有限元方法建立了微动工作台静、动特性分析模型,提出一种纳米级x-y-θ微动工作台的运动构思,并应用正交试验设计分析了参数对微动工作台的静、动特性的影响关系;文献[8]设计的微动平台,应用有限元分析结合解析法研制而成,它由两个不同的平台组装,该平台结构设计上采用柔性薄板结构,该平台在平面内可实现了微小的平动和转动;文献[9]采用圆弧柔性铰链,应用有限元分析法设计出一种3-RRR并联柔性微动平台,该平台可以实现微小的转动;文献[10]设计并制造出新型的压电陶瓷驱动的微传动、微进给装置,该装置微动的调节范围为(0~3.2)μm,它的分辨率可以达到1nm,并成功的把它应用于超微精密车削加工设备当中。
2 微动平台结构设计
项目设计的微动平台由三个压电陶瓷执行器完成驱动,在x方向一个压电陶瓷执行器驱动获得运动,而在y方向采用对称双压电陶瓷执行器驱动获得运动,除了获得x、y方向的直线运动外,通过在y方向两个对称压电陶瓷驱动进给位移的差值,获得z方向的转动,通过这一设计理念,假想出一种微动平台,如图1所示。
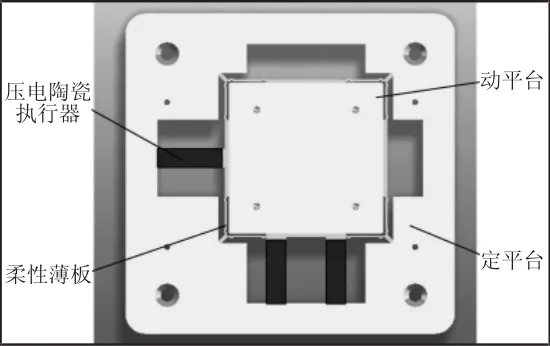
图1 三维微动平台的运动原理及结构图Fig.1 The Movement Principle and Structure Diagram of 3D Micro-Positional Stage
3 理论计算
3.1 微动平台台面尺寸确定
该微动平台的动力力学分析采用牛顿-欧拉方程运动原理进行分析求解,在工作的过程中,微动平台所受的驱动力的受力分析表达示意,如图2所示。微动平台的尺寸为a×b,在以O轴为xoy坐标轴内,微动平台受力F的驱动,微动平台在x、y轴方向获得的加速度分别为 αx和 αy,受到的分力分别为:Fx=Fsinθ,Fy=Fcosθ
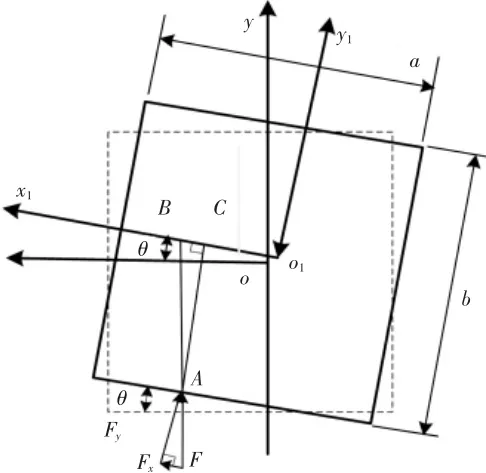
图2 微动平台的受力分析图Fig.2 Force Aanalysis of Micro-Positional Stage
由于本微动平台的结构为长方体,故微动平台对其圆心的

式中:MZ—刚体绕z轴转动的惯性力矩;JZ—刚体在运动过程中
的转动惯量;α—瞬时角速度。
如图2所示,根据图形中描述的尺寸,可知各点的坐标分别为 O(0,0),o1(x,y),力 Fy对微动平台形心的动量力矩为,根据公式:

通过计算可得整理后可得,微动平台的动力学结构方程可

由于微动平台在整个运动过程中的转动角度范围为0°≤θ≤1°,所以可以将公式中的sin θ≈θ,而来进行计算。
3.2 柔性薄板刚度计算
选取半圆形柔性薄板的弯曲刚度作为参数目标,根据半圆形柔性薄板的结构构造,建立力学模型。如图3(a)所示,图中:r—内圆弧半径;R—偏移后外圆弧半径;h—薄板的高度;b—半圆柔性薄板的厚度。由于在外力矩的作用下,半圆形柔性薄板中间圆弧部分易应生弹性角形变,选择薄板的尺寸参数的设计和材料的作为验证指标。由于半圆形柔性薄板在θ角范围内的薄板高度都为h,故在任意位置截取一段微元a,如图3(b)所示,微元高度为:a=h=R-r。

图3 半圆形柔性薄板和微元尺寸示意图Fig.3 Half Circular Parallel Structure and Size of Micro-Element’s Chiematic Diagram
由于半圆形柔性薄板为扇形截面,微元的宽度等于R-r,故由扇形面积积分可得
当有力矩MZ作用在微元上时(MZ为由压电陶瓷执行器驱动力P所引起的转矩),微元所受力情况,如图4所示,微元在力矩作用下沿z轴发生的角形变为dαz,由材料力学中的相关的公式,可以列出目标函数:
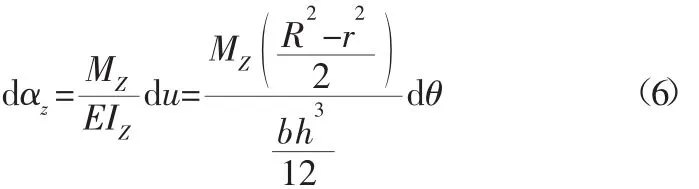
式中:IZ—微动平台薄板截面的惯性矩;θ—薄板的圆弧角度。
由此,半圆形柔性薄板绕z轴时的转动刚度方程可以列出:

式中:E—微动平台薄板所采用材料的弹性模量;B—该薄板的宽度。
由于该平台设计时,x方向和y方向结构相同,为此这两个方向的参数方面就基本相同。故设计的薄板机构为四个柔性连接薄板臂,共计8个柔性薄板组成,如图4所示。

图4 微动平台机构简图Fig.4 Mechanism of Micro-Positional Stage Diagram
微动平台的柔性薄板在x和y方向上在施加外力时,柔性薄板所产生的最大应力应小于材料的能够承受的许用应力,即材料本身的刚度要足够,材料的转动刚度公式:K=式中:E—薄板选定材料的弹性模量;I—薄板选定材料的惯性矩;
L—薄板的长度。
由薄板转动刚度-圆弧宽度(k-b)曲线图和薄板转动刚度-薄板圆弧半径(k-R)曲线图中,经过校核实验,确定尺寸。当微动平台在弹性恢复力Ft施力下,微动平台想要实现平面内平动ΔX距离时,平台在运动过程中所做的功为:W=FtΔX
微动平台X、Y方向共8个柔性薄板,8个柔性薄板储存积聚的总弹性势能为
式中:αz—薄板发生形变时所引起的角变形;kz—薄板的转动刚度。
由能量守恒定律可得:弹性恢复力Ft,在工作状态下所作的功W,应该与微动平台8个柔性薄板储存的总弹性势能Wo相等,薄板的弹性恢复力计算公式可以转换成:
由于αz是柔性薄板形变所引起的角变形,它的角形变数值很小,故可以近似看做αz≈tanαzr
要实现微动平台Δx=0.04mm的位移输出距离,通过前面公式(7)可以推算出,该柔性薄板的弹性恢复力为:

通过带入数据,可以得出该柔性薄板的弹性恢复力。可以推出,要实现Δx=0.04mm的位移输出距离,该柔性薄板的刚度可以列出
微动平台的运动简图,如图5所示。由于该柔性薄板结构的手臂直线方向进给时不会产生附加动作,现已知每个薄板的刚度kt,由受力关系可以表达出,故微动平台的刚度kp表达式可以列出:

3.3 沿x、y的输出位移计算
由于微动平台受到驱动力的过程中,微动平台的运动相当于一个弹性运动弹簧,由胡克弹性定律描述出,故微动平台在x、y受到驱动力的作用下,微动平台发生的位移可以列出:

式中:k—物质的弹性系数,它只由材料的性质所决定,与其他因素无关;F—是材料所受的应力;Δx—驱动力下所产生的应变。
3.4 绕z轴输出转角计算
由于微动平台要实现在z轴方向的转动,在单独Fy1、Fy2或两个Fy1、Fy2的输入差值驱动力的作用下,使平台发生了相应的转动,由于微动平台在驱动力的作用下所引起的角变形的数值很小,故微动平台引起的角变形近似等于微动平台的平动位移Δx,微动平台产生的转动角度应等于产生的角形变与微动平台长度尺寸的比值,故公式(10)可以列出:通过理论计算,加工出三维微动平台。
4 微动平台的实验测试
4.1 微动平台的位移测试
微动平台的位移特性测试实验室系统的组成包括压电执行驱动电源、计算机、微动平台、多功能数据采集卡、电涡流位移传感器和压电陶瓷驱动器等,如图5所示。其工作的原理如下:首先由计算机生成需要的驱动电压波形,输出的波形输入到多功能数据卡上的D/A转化器,再由D/A转化器控制压电陶瓷执行器驱动电源,然后驱动电源将施加在压电陶瓷执行器上,而压电陶瓷执行器将在驱动电压的作用下发生形变产生驱动力,驱动力施加在微动平台后,使得微动平台发生微小位移输出,产生的微小位移输出由电涡流位移传感器测出其具体的位移输出值,最后经过多功能数据采集卡上的A/D转换器将数据采集到计算机内,通过显示器显示出参数。在进行微动平台的位移测试时,在90V驱动电压作用下,压电微动平台进行位移输出,取平均值后输出。

图5 位移特性测试实验系统Fig.5 Experimental System for Measuring Displacement
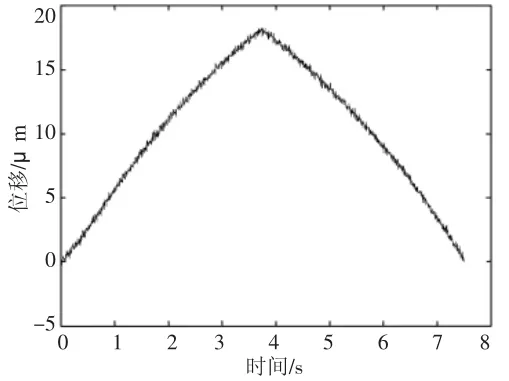
图6 x方向上的输出位移Fig.6 Displacement of Mmicro Positional Stage in x Direction
当x方向的压电陶瓷执行器进行驱动微动平台时,y方向上的左右两侧压电陶瓷执行器均预紧状态下,微动平台的输出位移,如图6所示。x方向的最大输出位移大约为18.40μm。当y方向左右侧压电陶瓷执行器同时驱动微动平台时,平台的输出位移,如图7所示。y方向的左右的最大输出位移分别约为18.65μm和19.04μm。
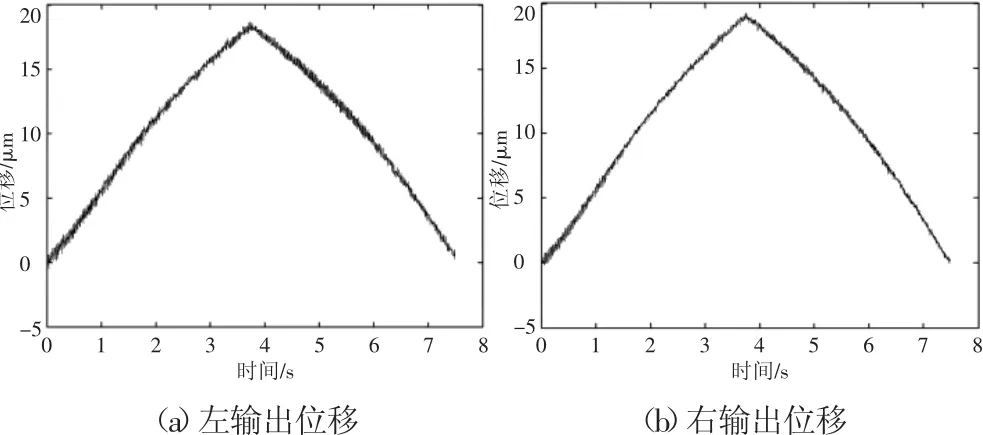
图7 y方向上的输出位移Fig.7 The Output Displacement Micro-Positional Stage in y Direction
4.2 微动平台固有频率测试
微动平台进行频率响应特性测试的实验系统有由重锤、压电加速度传感器、电荷放大器和FFT分析仪构成,如图8所示。实验测试的工作原理为:首先用重锤沿平台运动方向上敲击微动平台给平台施加一个冲击信号,产生的冲击信号会被输入到FFT分析仪中;然后,微动平台运动部分的响应被压电加速度传感器感知,产生的电荷信号被压电放大器转换为压电信号后输入FFT分析仪中,最后通过FFT分析仪输出得到微动平台在各方向上的频率响应特性参数。通过上述试验系统,分别对微动平台x、y及绕z轴转动的方向进行固有频率特性测试,测试结果,如图9所示。三个固有频率分别x方向固有频率为2.25kHz,y方向固有频率为2.28kHz,绕z轴转动的固有频率4.01kHz。
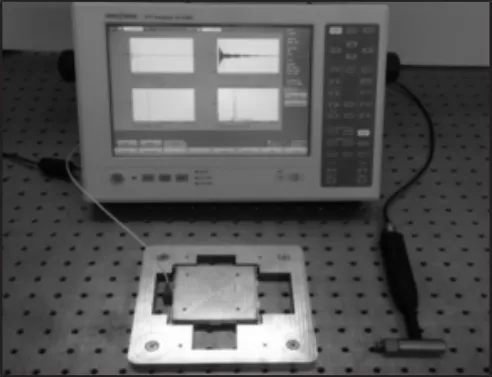
图8 频率响应特性测试实验系统Fig.8 Experiment System for Measuring Frequency Response Characteristic

图9 平台的频率响应Fig.9 Frequency Response of Stage
5 结语
通过预期输出位移目标对微动平台进行相关的结构设计和理论计算,然后在90V的最高驱动电压下,对微动平台进行位移特性曲线测试,结果表明x方向的位移为18.40μm,y方向的左右的位移分别为18.65μm和19.04μm;再次,通过对平台固有频率特性曲线测试,结果显示微动平台在x、y及绕z轴转动的方向的固有频率分别为 2.25kHz,2.28kHz,4.01kHz。
[1]李庆祥,王东生,李玉和.现代精密仪器设计[M].北京:清华大学出版社,2004.(Li Qing-xiang,Wang Dong-sheng,Li Yu-he.Modern Precision Instrument Design[M].Beijing:Tsinghua University Press,2004.)
[2]段瑞玲,李玉和,李庆祥.一种用于微器件装配的系统设计与研制[J].新技术新工艺,2006(5):30-33.(Duan Rui-ling,Li Yu-he,Li Qing-xiang.A system design and development for micro device assembly[J].New Technology and New Process,2006(5):30-33.)
[3]姚楠,王中林.纳米技术中的显微学手册[M].北京:清华大学出版社,2006.(Yao Nan,Wang Zhong-lin.Handbook of Nano-Technology in Microscopy[M].Beijing:Tsinghua University Press,2006.)
[4]吴鹰飞,周兆英.柔性薄板的设计与分析[J].机械设计与研究.北京.2006.(Wu Ying-fei,Zhou Zhao-ying.Design and analysis of flexible sheet[J].Machinery Design and Research,2002,24(2):41-46.)
[5]荣伟彬,马立,孙立宁.二维微动工作台分析及其优化设计方法[J].机械工程学报,2006,42(5):26-30.(Rong Wei-bin,Ma Li,Sun Li-ning.Analysis and optimum design of 2-DOF micro-positioning stage[J].Chinese Journal of Mechanical Engineering,2006,42(5):26-30.)
[6]淳华.基于拓扑优化方法的二维柔性结构微动平台研究[D].宁波:宁波大学,2010.(Chun Hua.Topology optimization method based on the 2D flexible structure of micro-positioning stage research[D].Ningbo:Ningbo University,2010.)
[7]朱仁胜,沈健,赵韩.精密微动平台[J].航空制造技术,2008(10):82-86.(Zhu Ren-sheng,Shen Jian,Zhao Han.Precision micro-positioning stage[J].Aeronautical Manufacturing Technology,2008(10):82-86.)
[8]Yong-Fong Fung,Wang-Chi Lin.System identification of a novel 6-DOF precision positioning table[J].Sensors and Actuators A,2009(150):286-295.
[9]JAE W.RYU,SUNG-Q LEE DAE-GAB GWEON,KEE S.MOON.Inverse kinematic modeling of a coupled flexure hinge mechanism[J].Mechatronics,1999(9):657-674.
[10]Yong Li,Min Guo,Zhaoying-Zhou.Micro electro discharge machine with an inchworm type of micro feed mechanism[J].Precision Engineering,2001,8(3):261-264.