地震后机载LiDAR点云的地物区分方法研究1
2018-01-19王金霞窦爱霞王晓青黄树松张雪华
王金霞 窦爱霞 王晓青 黄树松 张雪华
地震后机载LiDAR点云的地物区分方法研究1
王金霞 窦爱霞 王晓青 黄树松 张雪华
(中国地震局地震预测研究所,北京 100036)
利用机载激光雷达扫描(Light Detection and Ranging,LiDAR)技术所得点云进行震后倒塌建筑物提取时,树木与倒塌建筑物的点云特征十分相似,较难区分。为了快速准确获取震后房屋建筑物的受损情况,本文提出使用回波次数比特征指标,结合前人所提出的点云回波强度、归一化强度、最邻近点高差、法向量夹角、向坡角和向坡角等特征的均值和标准差,利用-最近邻分类法实现单体地物区分的方法。对2010年海地7.0地震震后机载LiDAR数据进行了地面点去除,分别选取了未倒塌建筑物、倒塌建筑物和树木各50个训练样本和各20个测试样本,计算了各因子的分布及其均值和标准差,在分析的基础上最终选取了可分性较强的8个分类特征,利用-最近邻分类法对测试样本进行了分类,结果显示分类正确率可达85%以上。研究表明选取多个有效的LiDAR点云分类特征可以较好地区分震后未倒塌建筑物、倒塌建筑物和树木,提高震后建筑物震害程度判定的准确性,为应急救援及时提供较为准确的灾情信息支持。
机载LiDAR点云-最近邻分类法 倒塌建筑物 地震应急 分类
引言
我国是世界上地震活动强烈和地震灾害严重的国家之一,地震带来的人员伤亡、经济损失巨大,灾害发生后的应急救援工作十分重要。目前,受灾区范围大、破坏严重、地形复杂、天气恶劣等条件的限制,传统地面现场调研方法不能满足震后应急需求,因此各种遥感影像广泛应用于震后救援与应急中(宿渊源等,2012;杨乐等,2012),使遥感技术成为震害提取和损失评估的重要手段(陈鑫连,1995;王晓青等,2008;姜立新等,2012)。大部分光学影像不能提供高程信息,个别可提供高程信息,但精度不高,制约了对震害信息的提取,而机载激光雷达技术则可以弥补此不足。机载激光雷达扫描(Light Detection and Ranging,下文简称LiDAR)技术能够提供高精度的三维空间信息,能增强对受损建筑物的识别。同时,与光学遥感测量相比,机载激光雷达测量受日照和云雾天气条件的影响较小,基本可实现全天候观测。在2008年汶川8.0级地震(马洪超等,2008)、2010年海地7.0级地震(Margesson等,2010)、2011年3月11日日本地震海啸(Fritz等,2011)等地震的应急响应阶段,应急人员均利用LiDAR技术快速获取了灾区的高精度空间数据。特大地震灾害应急响应实践证实,机载LiDAR技术在震后交通不畅、地形复杂、气象条件差的地区,具备灾情数据获取能力。因此,基于震后机载激光雷达点云进行地物识别,尤其是对受损房屋建筑进行提取具有重要意义。
目前,机载LiDAR技术在地震应急领域的应用日益广泛,主要研究方法可分为基于不同时相的激光雷达点云信息提取、LiDAR点云与其他遥感影像相结合的信息处理和单时相LiDAR点云信息提取。当前大部分地区的震前LiDAR数据匮乏,基于不同时相的点云信息提取在地震应急过程中较难实现。而LiDAR点云与高分辨率卫星影像相结合(程亮等,2008;窦爱霞等,2013),或者与航空影像相结合(张志友,2008;邓非等,2010;Trinder等,2012),综合运用遥感影像的光谱信息和LiDAR数据的三维信息,精确提取地物目标的方法已被广泛应用,但存在不同数据融合和匹配困难、易引入分辨率差异等缺点。利用震后单时相机载LiDAR数据则可避免多时相LiDAR数据的数据源匮乏、多源数据的匹配融合等问题,较适合应用于地震应急救援。Dorninger等(2008)提出了基于机载LiDAR点云,通过建筑物轮廓、面片的提取实现城市建筑物三维自动建模的方法;Labiak等(2011)利用移动窗口的方法对点云多个特征因子进行统计,得到栅格影像,以尽可能识别出树木,但仅用坡度特征因子对受损建筑物进行提取和定量化,忽视了其他特征对受损建筑物的识别能力。目前,基于震后单时相机载LiDAR数据对建筑物震害识别开展的研究较少,且研究方法多面向单个点的特征。针对单个点特征的研究可以避免点云划分,即同一地物对象点云聚合,但没有考虑地物对象整体点云的特征关系。
本文在前人研究的基础上,提出反映地物对象点云整体特征的回波次数特征指标,并结合回波强度、法向量、坡角及高差等已有的机载LiDAR点云特征,以海地地震部分灾区为研究区,分析倒塌、未倒塌建筑物以及树木等的LiDAR点云的各特征均值和标准差分布情况,挑选有效的分类敏感特征,再利用-最近邻分类方法对测试样本进行建筑物震害程度的分类提取与验证,以探讨利用LiDAR数据对未倒塌建筑物、倒塌建筑物和树木进行识别的效果。
1 方法
1.1 分类特征
通常机载LiDAR点云信息除点的三维坐标信息外,还包括点的回波强度、回波次数信息。同时,同一地物对象包含一系列的点云,其中某一点邻域内的点集,将从空间形态、回波强度和回波次数的统计分布上反映所在地物对象的特征。因此,本文提出了回波次数比()点云特征量,同时,引入回波强度()、归一化强度(I)、最邻近点高差()、法向量与天顶方向夹角()和向坡角(S)、方向坡角(S)等,作为建筑物震害LiDAR点云分类特征的参数。
(1)回波次数比()
设研究区域点云所在的投影坐标系为-,则LiDAR点云中某一点的R为点在水平投影面-上,个最近邻的投影点(如图1)中,回波次数大于1的点所占的比例:
式中,m为回波次数大于1的投影点的数量。
(2)回波强度()与归一化回波强度(I)
点云回波强度()取决于介质表面的反射系数,而激光的波长、介质材料及介质表面的明暗黑白程度等都是影响反射系数的因素。反射介质表面越亮,反射率越高(张小红,2007)。理论上未倒塌建筑物的屋顶表面多平滑,粗糙度小,相对于倒塌建筑物和树木的离散组成结构和粗糙表面而言,同等激光波长下其反射系数更大,回波强度更大。

图1 平面距离最近点搜索示意图
为表征不同地物回波强度的分布特征,本文对回波强度采用归一化处理(Labiak等,2011),即某地物对象的点云集合中,某一点的归一化强度(I)等于该点的回波强度(I)与该地物的最小强度值之差与地物的回波最大、最小强度值之差的比值:
(3)最邻近点高差()
最邻近点高差()指目标点高程与其水平投影面上距离其最近的点的高程差值。显然未倒塌建筑物单体点云高差变化极小,理想状态下结构简单的平面屋顶或人字形屋顶的点云高差为定值,对于屋顶结构复杂的未倒塌建筑物,其高差会有所变化,但仍呈现较强的规律性;而倒塌建筑物单体高差则出现多值性,规律性也较差。因此,高差对地物的识别有一定作用。
(4)法向量夹角()
法向量夹角()是指法向量与天顶方向的夹角(黄树松等,2016),其范围是[0°,180°],其中法向量通过Hoppe等(1992)提出的基于局部表面拟合的方法来确定。本文通过搜索三维空间中距目标点最近的20个点构成最小二乘平面,再求取该平面在目标点处的法向量,从而得到法向量与天顶方向的夹角。法向量夹角对建筑物的倒塌部分十分敏感(Dou等,2016)。
(5)方向坡角(S)与方向坡角(S)
在机载LiDAR三维点云所在的地理坐标系统(-)中将点云投影在-平面上,求取方向上与目标投影点最邻近的投影点,目标点与该投影点对应的LiDAR点所构成的向量与-平面的夹角称为目标点的方向坡角(S)。同理可以确定方向坡角(S),如图2。为便于统计,本文规定坡角范围是[-90°,90°]。通常,未倒塌建筑物单体点云的方向坡角和方向坡角的大小均一,分布规律;倒塌建筑物单体坡角值则大小起伏,倒塌与未倒塌部分交界处有明显变化,一般倒塌建筑物的坡角比未倒塌建筑物的坡角大,呈现局部规则分布;而树木坡角值则大小不一,分布无规律(黄树松等,2016)。
1.2 K-最近邻分类法
-最近邻分类法是惰性学习法,基于类比学习,其基本原理是将测试元组与已知类别的测试元组进行比较学习。如图3所示(以二维特征为例),对具有两个特征的数据组利用-最近邻分类时,我们计算待分类点X距离个邻近点的距离,则距离最小的点所属的类别即为该待分类点的类别(1、2或3)。-最近邻分类法最大的特点是不需要使用训练样本设计分类器,可直接用训练样本对测试样本进行分类,原理简单,便于实现,应用广泛(滕敏等,2015)。目前,对于分类速度的改进主要有浓缩训练样本集算法和未知样本预分类算法,其基本思想是结合聚类算法或其他分类器,先对原始样本进行预分类,选择预分类后的代表子集参与-最近邻分类,实现样本压缩,提高分类速度;对于分类准确度的改进主要通过选用合适的距离机制等方法实现(王娜等,2009)。
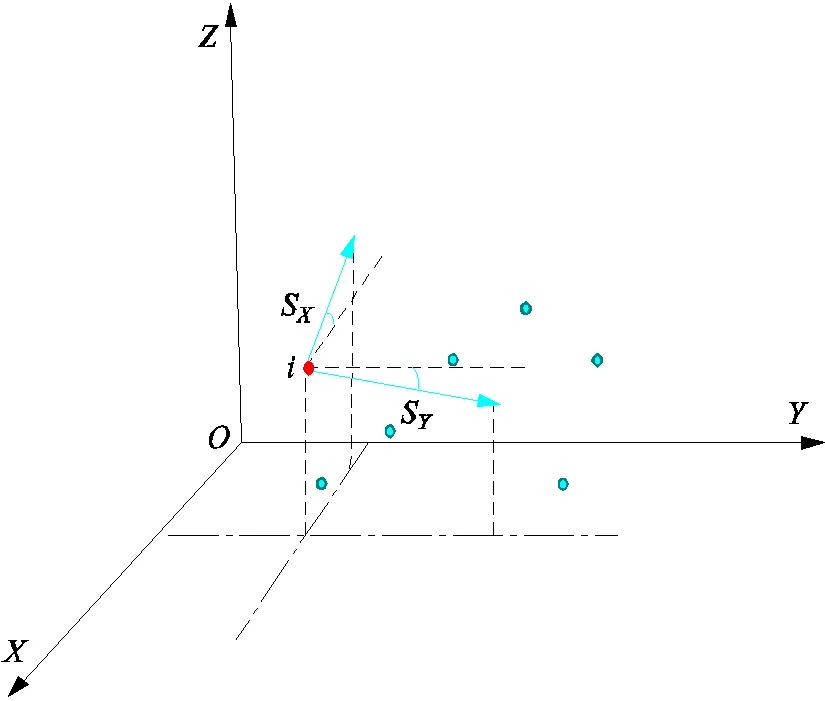
图2 i点的X向坡角、Y向坡角示意图
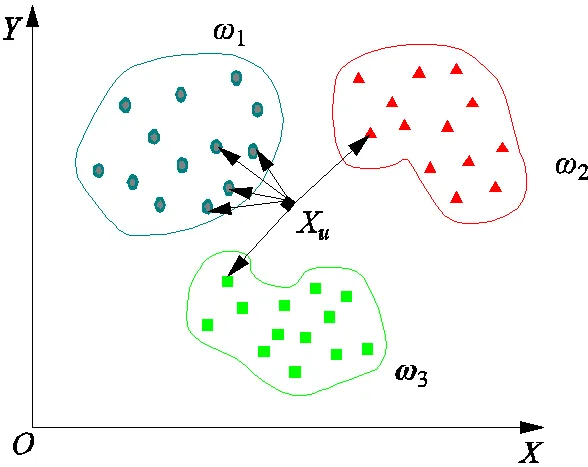
Xu为测试样本,ω1、ω2、ω3为目标类别
该分类算法的数据类型可以是数值型和分类型,数值型可以用于计算距离,但分类型则不适合,因此针对分类型数据,通常对其进行数字化再比较两个样本中对应属性值的差值。在本研究中,所有样本的属性值均为数值型,可直接进行距离计算,对输出类别进行数字化。
-最近邻分类法中度量距离的选择也很重要,最常用的是欧几里得距离,不同情况下也可选用Manhattan距离或其他距离度量(Han等,2007)。本研究使用欧几里得距离,假设某测试验本为(1,2,…,y),训练样本为(1,2,…,x),计算方法如下:
其中,为两样本之间的欧几里得距离。
如此计算该测试样本距离邻近个训练样本的距离,找到其中距离的最小值及其对应的训练样本,则测试样本与该训练样本类别相同。依此对所有测试样本进行类别判断,完成分类。
2 研究数据及其预处理
2.1 研究数据
2010年1月12日海地首府太子港附近发生7.0级地震,震源深度约10km,后发生多次余震,余震最大达6.3级,造成包括海地总统府、国会大厦在内的大多数建筑物损毁和几十万人员伤亡。世界银行全球减灾和灾后恢复机构(Globe Facility for Disaster Deduction and Recovery,简称GFDDR)于震后获取了灾区机载LiDAR点云,数据获取时间为2010年1月21日,点云密度为2—5点/m2。本文选取位于海地首都太子港城区中约0.8km2的区域作为研究区。辅助使用的光学遥感影像是同机相机获取的光学航空影像。该区域房屋建筑类型多样,有大型多层建筑区,如公寓、宾馆、教堂等,建筑面积较大,分布较稀疏,其间夹杂少量树木或小范围的树林;亦有低矮简易房屋,建筑物单体面积较小,分布较密集,在卫星影像上成片分布,树木较少,无植被密集区。该研究区域基本涵盖了城区所有房屋的建筑类型,具有代表性。利用光学影像在研究区选取了210个典型样本,作为本文特征选择、分类及验证的样本。研究中随机选取了未倒塌建筑物、倒塌建筑物和树木各50个样本作为训练样本,分布如图4(a)和4(b);各20个样本作为测试样本,分布如图4(c)所示。
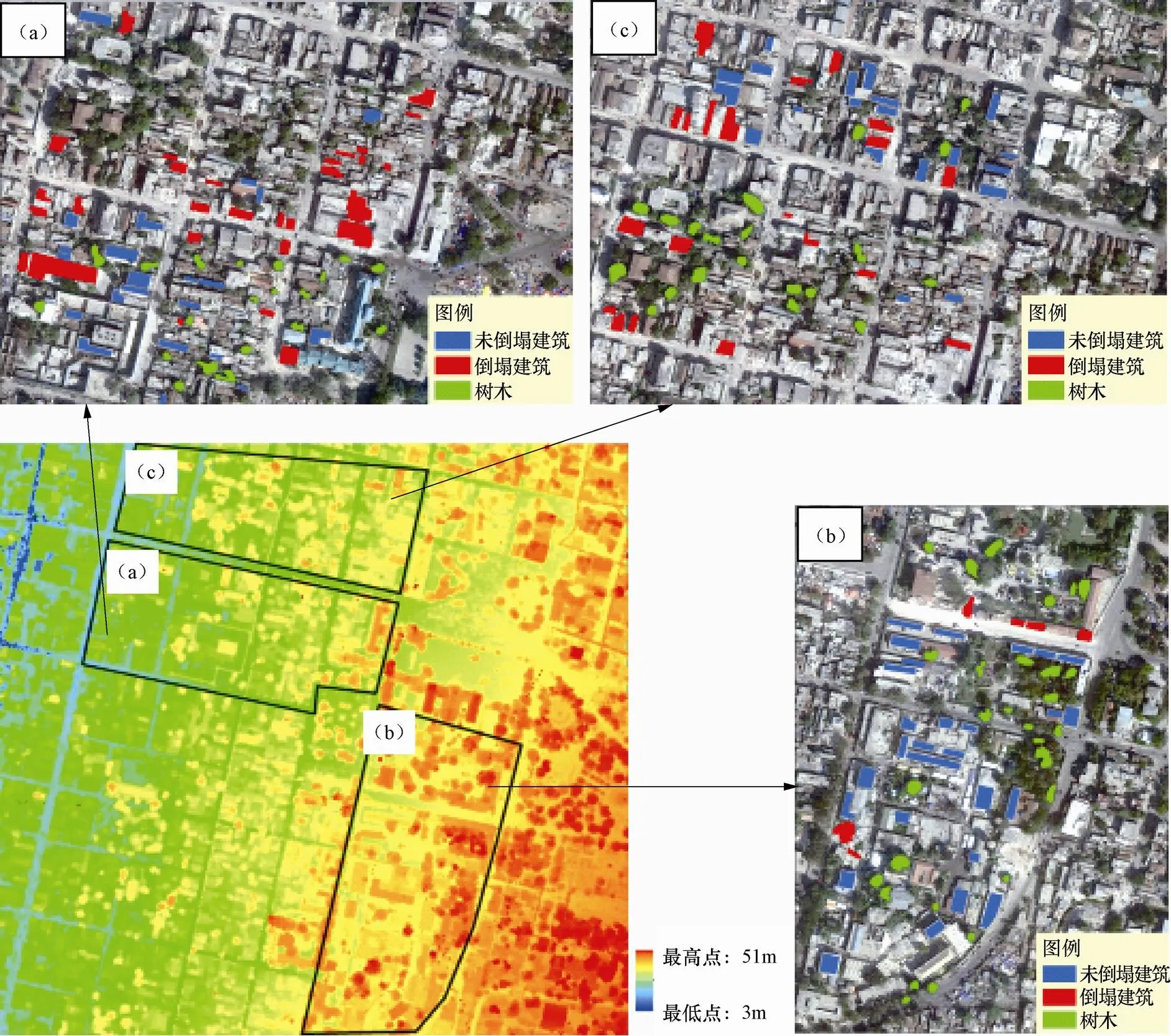
图4 研究区域位置和样本分布
2.2 数据预处理
获取点云数据的过程中,由于扫描仪本身的缺陷、环境干扰(如空中飞鸟)等因素,点云中常包含少量噪声点,剔除这些噪声点的过程称为点云去噪。本文基于点云魔方软件,采用基于点云局部空间分布统计的去噪算法,将局部点密度与整体点密度相差较大的点标记为噪声点并去除。为获得非地面点,本文采用CSF(Cloth Simulation Filter)滤波方法(Zhang等,2016),对去噪后的点云进行滤波,以便从激光脚点数据点云中提取数字地面模型(DTM)和数字高程模型(DEM)(张小红,2007),即提取地面点。CSF采用布料模拟原理,将原始点云倒置,再将具有一定硬度的布料覆盖其上,得到近似的地形估计,最后依据估计的地形,分离地面点与非地面点。以图5(a)研究区1的点云为例进行实验分析,滤波所得结果如图5(b)所示,可见该方法基本分离了地面点与非地面点,以CSF滤波法后所得的非地面点作为后续研究的基础。

图5 CSF滤波法从研究区1的原始点云(a)中分离的地面点(b)结果图
3 基于机载LiDAR点云参数的震害分类特征分析
3.1 震害点云参数特征分析
本文选取了回波次数比()、回波强度()、归一化回波强度(I)、最邻近点高差()、法向量夹角()、方向坡角(S)和方向坡角(S)等7个因子,对未倒塌建筑物、倒塌建筑物和树木的训练样本的点云数据进行了统计分析,结果如图6所示。可见,不同类型的地物,其各因子的分布有明显差异。其中未倒塌建筑物的回波次数比的值基本为0;倒塌建筑物多大于0,部分点的值在0.1—0.2范围内;树木值多大于0.1,最高可达0.6。关于回波强度,未倒塌建筑物屋顶表面多平滑,粗糙度小,相对于倒塌建筑物和树木的离散组成结构和粗糙表面而言,同等激光波长下其反射系数更大,回波强度更大。从图6中可见,未倒塌建筑物的最邻近点高差值基本小于0.1m;倒塌建筑物的倒塌部分高差发生明显变化,值可达5m;而树木的值为0—16m,变化无规则。3类地物的法向量夹角()和、方向坡角变化也比较明显,未倒塌建筑物角度呈现规则变化,倒塌建筑物的角度分布范围较大,但有明显的变化边界,树木则大小不一,分布无规律。
3.2 震害点云特征选择
为实现不同建筑物震害的识别,对选取的150个训练样本和60个测试样本分别计算了各样本点云的上述7个特征因子值及其均值和标准差,以进一步从统计上研究不同类型地物上述各特征因子的分布情况,选择适宜的分类特征。未倒塌建筑物、倒塌建筑物和树木样本的各个因子均值和标准差的概率密度曲线分布如图7所示,其中各地物类别的回波强度、归一化回波强度的均值和标准差、方向和方向坡角均值的曲线交叉严重,重叠部分占比较大,说明这些特征值对地物的可分性较差,各类别其他8个特征值的曲线交叉部分相对较少,即有较强的可分性。因此,本文选取回波次数比均值和标准差、最邻近点高差均值和标准差、法向量夹角均值和标准差、方向和方向坡角标准差作为分类特征。

图6 不同地物各特征因子分布

图7 各类别样本均值和标准差分布(一)

图7 各类别样本均值和标准差分布(二)
4 分类结果与讨论
基于上节选取的回波次数比均值、标准差等8个分类特征,利用150个训练样本,60个测试样本(其中未倒塌建筑物、倒塌建筑物、树木的训练样本各50个,测试样本各20个,类别编码依次为1、2、3),通过-最近邻分类法进行地物自动分类。-最近邻分类算法基于Matlab平台实现,流程如图8所示。

图8 K-最近邻分类算法流程图
为了确定最优的值,分别测试了为1—100的分类正确率,分布如图9所示,当=3时,分类准确率为98.3%,达到最高。所有分类准确率均在85%以上,这表明回波次数比均值和标准差、最邻近点高差均值和标准差、法向量夹角均值和标准差、方向和方向坡角标准差这8个特征是区分未倒塌建筑物、倒塌建筑物和树木的有效分类特征。

图9 分类正确率变化曲线图
统计取1—100的分类结果,发现错误最多的为未倒塌建筑物和倒塌建筑物的分类,如图10中黄色圈内所示,有2个未倒塌样本错分为倒塌样本,一个倒塌建筑物错分为树木,2个倒塌建筑物错分为未倒塌建筑物。树木样本在每次分类中全部分类正确,这主要是由样本选取精度及样本本身质量造成的。
本文中未倒塌建筑物、倒塌建筑物和树木样本全部为手动选取,因此分类方法的自动性有待探究,如何实现滤波后非地面点云的自动分割是未来研究的重要内容。本文中对建筑物仅划分了未倒塌建筑和倒塌建筑物,若能对倒塌建筑物进行更细致的分类,将进一步提高震害分类精度,为灾后应急救援工作提供帮助。此外,各类地物的测试样本数量有限,因此该分类方法的普适性仍有待提高。研究中所使用的-最近邻分类法方法在分类过程中,最邻近样本数的选取直接影响分类效果,因此对不同的值进行试验也是研究的重要工作。
5 结论
本文分析了未倒塌建筑物、倒塌建筑物和树木3类地物的机载LiDAR点云特征,选取了回波强度、回波次数比、最邻近点高差、法向量夹角及坡角特征,计算其均值和标准差并统计各样本特征值分布,选择其中分割效果最好的8个分类特征,在此基础上利用-最近邻分类法进行分类试验。结果表明,基于回波次数比均值和标准差、最邻近点高差均值和标准差、法向量夹角均值和标准差、方向和方向坡角标准差这几种分类特征,利用-最近邻分类法所得结果与真实分类具有非常高的一致性,证明了本研究中所选分类特征的有效性,同时利用该方法可以有效实现地物点云分类,能够为震后应急救援工作提供有效指导,为灾后经济损失评估提供依据。

图10 分类结果图
陈鑫连,1995.地震灾害的航空遥感信息快速评估与救灾决策.北京:科学出版社.
程亮,龚健雅,2008.LiDAR辅助下利用超高分辨率影像提取建筑物轮廓方法.测绘学报,37(3):391—393,399.
邓非,徐国杰,冯晨等,2010.LiDAR数据与航空影像结合的建筑物重建.测绘信息与工程,35(1):35—37.
窦爱霞,马宗晋,黄文丽等,2013.基于机载LiDAR和多光谱图像的建筑物震害自动识别方法.遥感信息,28(4):103—109.
黄树松,窦爱霞,王晓青等,2016.基于震后机载激光雷达点云的建筑物破坏特征分析.地震学报,38(3):467—476.
姜立新,帅向华,聂高众等,2012.地震应急指挥协同技术平台设计研究.震灾防御技术,7(3):294—302.
马洪超,姚春静,张生德,2008.机载激光雷达在汶川地震应急响应中的若干关键问题探讨.遥感学报,12(6):925—932.
宿渊源,张景发,2012.三维激光扫描技术在震后地面三维重建中的应用.地壳构造与地壳应力文集,0(0):30—37.
滕敏,卫文学,滕宁,2015.-最近邻分类算法应用研究.软件导刊,14(3):44—46.
王娜,侯爽,2009.-最近邻分类技术的新发展与技术改进.河北省科学院学报,26(4):11—13.
王晓青,王龙,王岩等,2008.汶川8.0级大地震应急遥感震害评估研究.震灾防御技术,3(3):251—258.
杨乐,曾薇,谭颖,2012.地震应急卫星通信系统的设计与应用.震灾防御技术,7(1):100—109.
张小红,2007.机载激光雷达测量技术理论与方法.武汉:武汉大学出版社.
张志友,2008.基于LiDAR数据和航空影像的地形与建筑物提取及三维可视化.北京:北京交通大学.
Dorninger P., Pfeifer N., 2008. A comprehensive automated 3D approach for building extraction, reconstruction, and regularization from airborne laser scanning point clouds. Sensors, 8(11): 7323—7343.
Dou A. X., Ma Z. J., Huang S. S., et al., 2016. Building damage extraction from Post-earthquake airborne LiDAR data. Acta Geologica Sinica, 90(4): 1481—1489.
Fritz H. M., Phillips D. A., Okayasu A., et al., 2012. The 2011 Japan tsunami current velocity measurements from survivor videos at Kesennuma Bay using LiDAR. Geophysical Research Letters, 39(7): L00G23.
Hoppe H., DeRose T., Duchamp T., et al., 1992. Surface reconstruction from unorganized points. In: Proceedings of the 19th Annual Conference on Computer Graphics and Interactive Techniques. New York, NY , USA: ACM, 71—78.
Han J. W.,Kamber M.,2007.数据挖掘:概念与技术.范明,孟小峰,译.北京:机械工业出版社.
Labiak R. C., van Aardt J. A. N., Bespalov D., et al., 2011. Automated method for detection and quantification of building damage and debris using post-disaster lidar data. In: Proceedings of SPIE 8037, Laser Radar Technology and Applications XVI. Orlando, Florida, United States: SPIE, 80370F.
Margesson R., Taft-Morales M., 2010. Haiti earthquake: crisis and response. In: DTIC Document. Congressional Research Service.
Trinder J. C., Salah M., 2012. Aerial images and LIDAR data fusion for disaster change detection. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume 1-4, 2012 ⅩⅫ ISPRS Congress,25 August-01 September 2012, Melboume, Australia: 227—232.
Zhang W. M., Qi J. B., Wan P., et al., 2016. An easy-to-use airborne LiDAR data filtering method based on cloth simulation. Remote Sensing, 8(6): 501.
王金霞,窦爱霞,王晓青,黄树松,张雪华,2017.地震后机载LiDAR点云的地物区分方法研究.震灾防御技术,12(3):677—689.
The Ground-objects Classification Based on Post-earthquake Airborne LiDAR Data
Wang Jinxia, Dou Aixia, Wang Xiaoqing, Huang Shusong and Zhang Xuehua
(Institute of Earthquake Science, China Earthquake Administration, Beijing 100036, China)
It is difficult to distinguish the characteristics of the point cloud from the collapsed buildings, since the characteristics of the cloud and the collapsed building are similar. In this paper, we present the ratio of echo ratio and combined with the previous point cloud echo intensity, normalization intensity, altitude difference of the nearest neighbor, normal vector,-slope and-slope of points, and compute the mean and standard deviation of every feature to obtain damage buildings after the earthquake. To discriminate single object, we use the classification algorithm based on-Nearest Neighbor. We select 150 point clouds samples of 50 typical undamaged building, 50 collapsed building and 50 tree as samples from airborne LiDAR point cloud data which got after the 2010 Haiti earthquake withW7.0 by the way of human-computer interaction and compute the mean and standard deviation of every feature. We apply-Nearest Neighbor to classify test samples by 8 optimal factors chosen from means and standard deviations. The classification accuracy is 85%, which indicates that the optimal factors are effective and the proposed method in this study is capable of distinguishing between building (undamaged and damaged building) points and tree points, which can extract damaged buildings and support for emergency rescue after earthquake.
Light Detection and Ranging (LiDAR);-Nearest Neighbor algorithm; Damaged buildings; Earthquake emergency; Classification
10.11899/zzfy20170323
国家自然科学基金(41404046)资助
2016-12-23
王金霞,女,生于1990年。在读研究生。主要研究领域:遥感与GIS应用。E-mail:wangjxwake@163.com