机载天线稳定平台的结构设计及有限元分析
2018-01-18周志峰石旭伟俞竹青
周志峰,石旭伟,俞竹青
(常州大学,常州 213164)
0 引言
机载合成孔径雷达(SAR)是安装在载机上的一种高分辨率的二维成像雷达,具有全天候、远距离的特点,已广泛应用在军事、民用的各个领域[1]。合成孔径雷达清晰成像则需要天线在载机的摇摆、气流扰动等环境下保持惯性空间的稳定。稳定平台则是一种集光、机、电于一体的能保持雷达天线稳定的复杂精密设备。稳定平台安装在载机与合成孔径雷达天线之间,当载机发生姿态变化时,稳定平台能够反向运动补偿载机的变化,实现天线波束的指向的稳定[2]。
本文所设计的稳定平台应用于螺旋桨式无人侦察机,无人侦察机的空间及负荷能力有限,机载SAR天线稳定平台在满足强度要求的条件下,要求结构紧凑,体积小,重量轻。因此,运用有限元分析软件Ansys Workbench对稳定平台结构进行静力学及动力学分析具有重要的指导意义。
1 稳定平台的技术要求
依据CZ5H型雷达天线稳定平台的基本要求及使用环境确定其性能参数:
1)稳定平台的轴数及运动范围
两轴稳定平台(方位+横滚);天线组件的供电、控制、高频信号及风机供电线等需穿越台体引向外联接插件,方位向电机外置。
方位运动范围:±110°,横滚运动范围:0°~60°;
2)平台稳定精度
方位:0.1°,横滚:0.1°;
3)平台运行速度
方位轴及横滚轴旋转运行速度为5°/s;
4)重量要求
稳定平台台体总重量(不包含天线重量)≤5kg;
5)气候环境适应性要求
满足-55℃~+85℃的24小时贮存能力,-40℃~+65℃的启动运行能力,达到温度冲击、湿热、淋雨试验的要求;
6)满足振动实验
稳定平台在螺旋桨振动激励环境下,其满足刚度要求,各方向最大位移量不超过0.1mm。
2 稳定平台结构设计及三维模型的建立
CZ5H型雷达稳定平台是针对螺旋桨式无人机所设计,考虑其稳定精度、重量要求及运动范围,选择两轴两框架的结构形式。方位轴采用齿轮传动,齿轮侧隙会影响稳定平台的传动精度。稳定平台方位向传动速度低,摩擦发热量小,可以采用错齿法来减小齿轮侧隙。主动齿轮为两片薄齿轮,上侧薄齿轮的齿左侧与下侧薄齿轮的齿右侧分别与从动齿轮的左右两侧紧贴在一起,减小齿轮侧隙。横滚向及方位向都采用直流无刷伺服电机加谐波减速机的间接驱动方式。
利用建模软件SolidWorks建立稳定平台各部件的模型并完成相应装配,对各零部件定义材料属性,并利用软件的质量属性,计算稳定平台的重量为4.65kg。稳定平台主要包括主动齿轮、方位框、主动侧板、平台挂装板、从动齿轮、从动侧板。平台挂装板上侧通过4个M8螺栓与载机固定,下侧与从动齿轮上表面固定,方位向由方位电机驱动主动齿轮转动,横滚向由横滚电机驱动主动侧板带动天线转动。方位向及横滚向的极限位置都设有零点传感器,并通过机械限位的方式限制运动的最大转角,防止冲击破坏。如图1所示(图中更改齿轮罩及横滚罩的透明度)为稳定平台结构图。
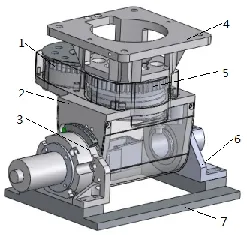
图1 稳定平台结构图
3 稳定平台的静力学分析
CZ5H型雷达天线稳定平台采用的是方位—横滚两轴式结构,其平台挂装板、方位框、横滚轴的主动侧板及从动侧板是平台结构的主要承重件。根据稳定平台的运输及使用要求,利用CAE技术对稳定平台进行静力学分析。
三维模型中的各类细节特征(如小的连接孔、槽,圆角等)会使有限元网格划分过密,致使单元数量的激增,消耗计算机资源,影响计算效率[3]。在几何模型导入CAE软件之前需要将几何模型进行简化,其简化基本原则为[4]:将模型中细小尺寸的特征进行省略,比如倒角、定位销孔、沉孔等;结构中两零件依靠多个螺栓连接且材料一致,则作一体化处理;对轴承进行简化,不考虑轴承旋转因素,主要考虑轴承变形对结构设备的影响。雷达天线稳定平台中横滚罩及齿轮罩主要用于防砂尘及水雾对结构平稳运行的影响,不承受负载。横滚罩及齿轮罩都用铝合金加工而成,其质量轻且对结构影响小,在有限元分析中对其忽略。简化后的模型利用数据接口导入Ansys Workbench中。
3.1 材料选择及网格划分
考虑到稳定平台的防锈性、耐腐蚀性及平台自重问题,框架结构材料主要选用铝合金6061-T6;传动零件则选用不锈钢304;齿轮选用材料为不锈钢440C。完成模型导入后,对稳定平台模型各零件进行相应的材料属性定义,其特性参数如表1所示。

表1 材料特性参数
网格划分质量与结果的准确性及解题规模有着直接的关系,划分过密,计算量大,影响解题效率,划分过于粗糙则会导致分析计算的结果与实际情况不符。结构中受力较小的零件,采用相对粗糙的网格规模,主要受力零件,采用质量好网格划分方法。稳定平台零部件几何形状各异,对平台挂装板及方位框架采用六面体网格划分,其他部件采用四面体划分法。
在本次网格划分中,Relevance Center及Smoothing设置为Medium。本次共产生168320个单元及382508个节点,单元畸变度为0.272。本次网格划分质量较好,满足当前的分析要求。稳定平台的划分结果如图2所示。
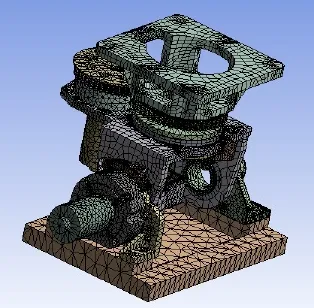
图2 网格划分模型
3.2 求解结果及分析
平台挂装板将稳定平台固定在无人机上,对挂装板上表面施加固定载荷。考虑到载机在降落过程中遇到的冲击载荷影响,平台台体受自重及负载外还需要承受5g的惯性过载,以最恶劣的工况来模拟稳定平台结构是否可靠。施加载荷后得到模型的等效应力及位移云图。
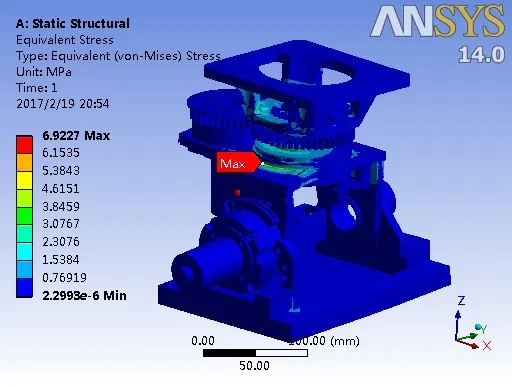
图3 应力云图

图4 位移云图
在图3应力云图中,箭头标记出最大应力处在方位框架主动侧板方向,靠近方位框架旋转中心,最大应力值为6.92MPa。方位框是稳定平台两轴结构的连接件,承受台体的主要重量,方位旋转中心开有圆孔,且左侧是横滚驱动机构的安装方向,因此方位框架左侧会出现应力最大位置,与模型分析一致。方位框架为铝合金6061-T6加工而成,其屈服强度为275MPa,远大于方位框架的最大应力值。在图4位移云图中,最大位移在天线左侧及横滚电机末端,其位移量为0.016mm。稳定平台承受载荷时会发生变形,平台挂装板上侧与载机固定,因而变形量则会在天线末端最大化。横滚轴主动侧零件较多,质量较大,受力变形量大。因此,在天线左侧及横滚电机末端会出现位移最大处。稳定平台设计指标要求其在各轴向的最大位移小于0.1mm。依据静力学分析结果可知,稳定平台在其工况条件下能够满足设计要求。
4 稳定平台的动力学分析
4.1 模态分析
任何结构都有他自身的固有频率,在机械结构设计和工程问题中都应当避免共振的发生。固有频率、振型等可以运用试验和计算的方法获得,有限元中的模态分析就是利用计算的方法确定结构模态参数的一种技术。固有频率是系统固有属性,与外载荷无关,其自由振动方程为[5]:

其中:[M]为质量矩阵;[K]为刚度矩阵;
上式特征方程为:

模态分析中边界条件是十分重要的,对稳定平台添加合理的约束,不考虑外部载荷的作用。Ansys Workbench的分析结果比较直观,方便设计者了解结构频率及振型。将静力学分析中的结构模型及材料属性直接导入Modal模块中。考虑到计算效率,重新划分网格,对平台挂装板的上侧施加固定约束。低阶模态能量占比大,对结构响应影响大[6]。因此,本文计算出雷达天线稳定平台的前六阶固有频率及振型,如图5、图6所示。
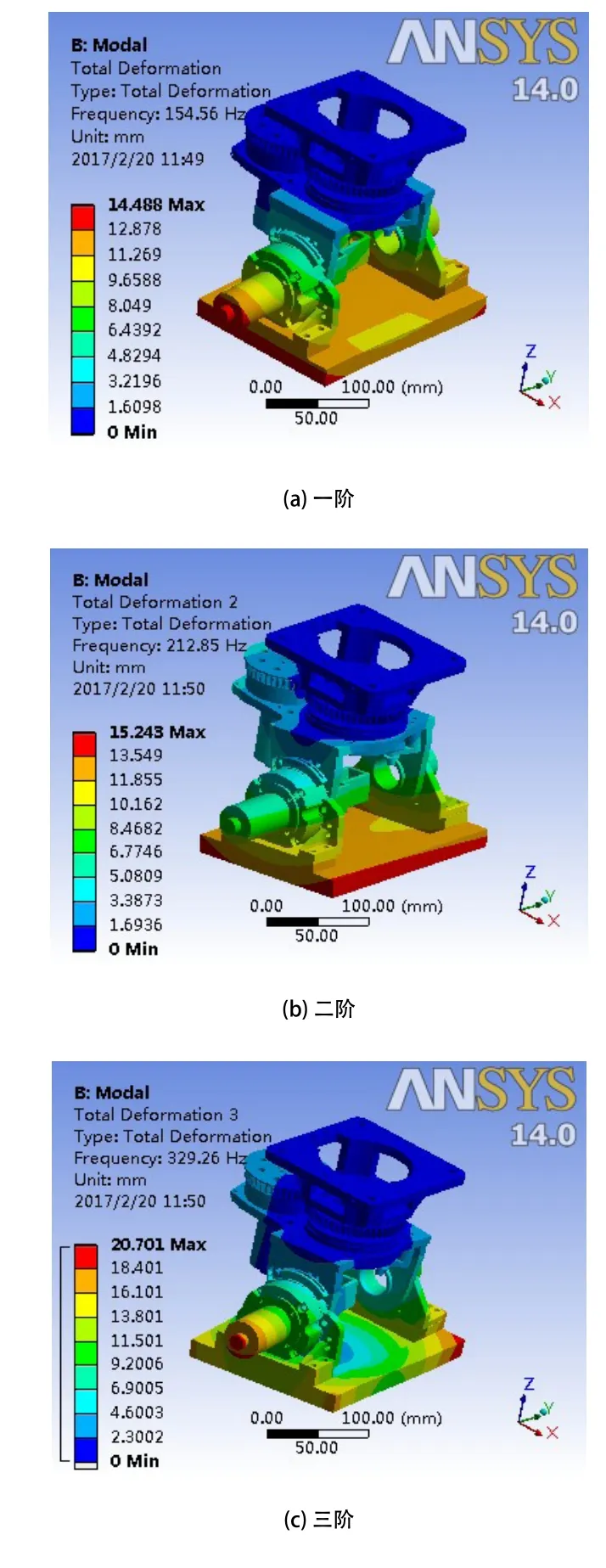
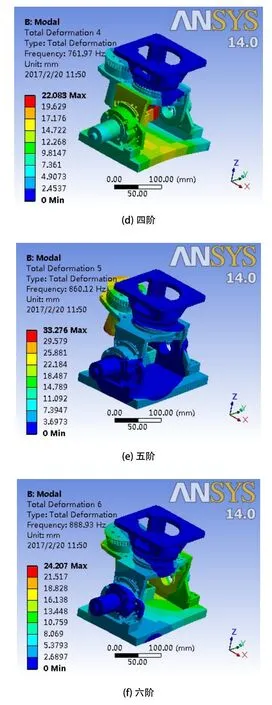
图5 平台前六阶模态
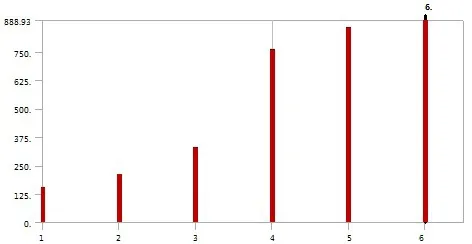
图6 前六阶模态固有频率柱状图
由一阶模态可知,雷达天线稳定平台的基频约为154.56Hz,方位框架沿横滚轴向内振动。本文选用的是直流无刷伺服电机,其工作频率为8Hz,无人机的螺旋桨2000r/min时基频为100Hz[7]。稳定平台的固有频率大于无人机基频的50%,能够有效避免发生共振。前六阶振型体现在方位框架的摆动,特别是横滚轴主动侧的振幅较大。方位框架横滚轴主动侧厚度为9mm,其扭转变形量大,可增加其厚度或架设肋板。模态分析结果显示稳定平台的结构设计及零件材料选择合理,为样机制作提供理论依据。
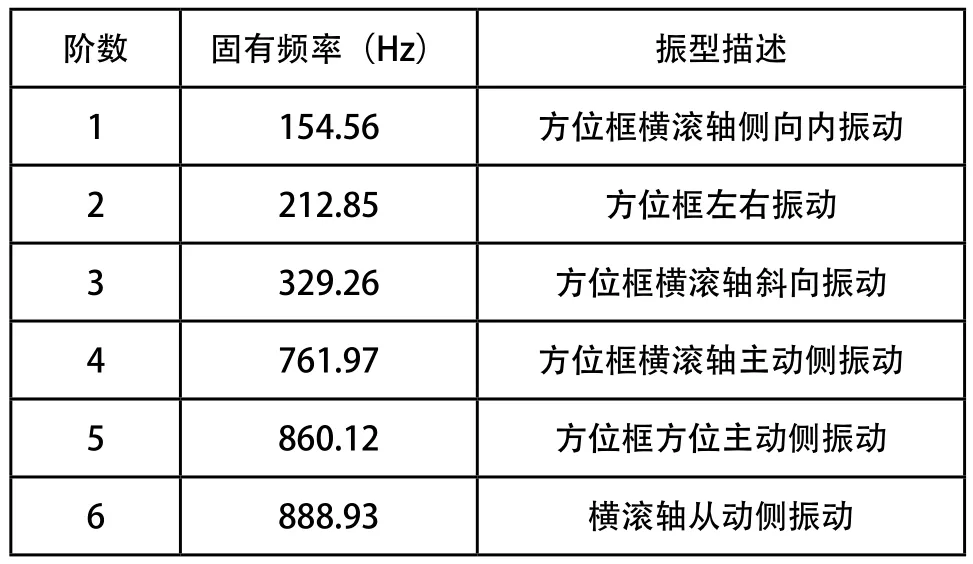
表2 前6阶模态振型描述
4.2 随机振动分析
振动包括确定振动和随机振动,随机振动是一种无法用具体函数来表示的具有一定统计规律的振动[8]。随机振动分析则是根据概率统计学的谱分析技术,输入结构固有频率及激励特征,输出结构在振动激励下的应力及变形位移量。随机振动分析在光学器械、机载设备中应用广泛。
4.2.1 雷达天线稳定平台振动环境
CZ5H型雷达天线稳定平台挂装于无人机上,该无人机是一种固定翼式螺旋桨飞机。螺旋桨的转动会引起相应的振动,根据相关资料,可以查找到螺旋桨式飞机振动环境[7],如图7所示。其中L0的试验值为0.1g2/Hz,基频f0为100Hz,尖峰带宽为频率的±5%,f1=2f0,f2=3f0,f3=4f0。当窄带峰值小于宽带随机值0.01g2/Hz时,选用宽带随机值0.01g2/Hz。计算各频率点功率谱密度,如表3所示。
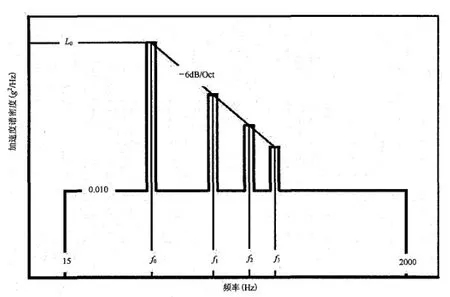
图7 稳定平台的振动环境

表3 加速度功率谱密度
4.2.2 雷达天线稳定平台的随机振动分析
模态分析是随机振动分析的基础,将稳定平台模态分析的模型及结果导入到随机振动分析中,在平台挂装板上侧施加基础激励,其输入功率谱密度如表3所示。考虑到模态分析中方位框架前三阶振形都已Y轴为振动方向,因此激励方向选择为Y向。
图8为稳定平台应力云图,应力多集中于稳定平台的平台挂装板、从动齿轮轴部、方位框架、主动侧板及从动侧板上。最大应力为13.85MPa,远小于铝合金的许用应力,稳定平台结构满足强度要求。这些零件是稳定平台承受载荷的主要部件,因此在安装孔及旋转中心孔会造成应力集中现象。图9为稳定平台的Y向位移云图,在天线部位出现最大变形,变形值为0.025mm,越接近平台挂装板变形量越小。稳定平台要求最大变形量为0.1mm,满足其要求。在横滚轴主动侧板底面设置测点,其响应PSD曲线如图10所示,在155.66Hz频率左右时出现峰值,该频率与模态分析的结构固有频率基本一致,该频率下测点最大位移为0.0225mm。图中出现波动区域发生在结构模型的各阶固有频率附近。本文所设计的稳定平台的动态特性好,在螺旋桨激励环境下仍然能够满足技术要求。
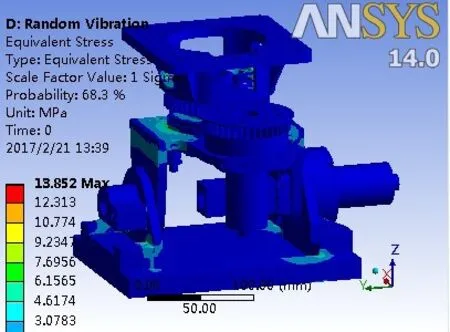
图8 稳定平台的应力云图
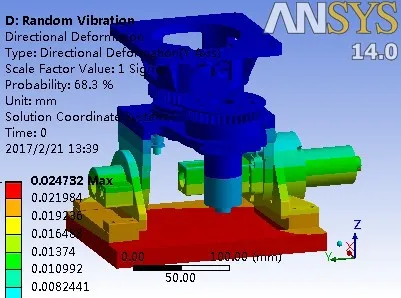
图9 Y方向位移云图
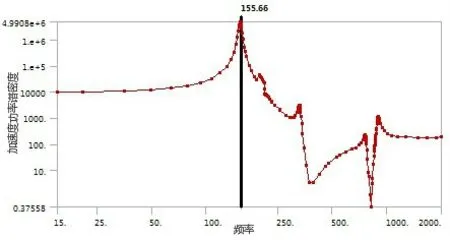
图10 主动侧板响应PSD
5 结论
1)根据CZ5H型雷达天线稳定平台的技术要求,完成机械结构设计,并利用SolidWorks对零部件进行三维建模。
2)静力学分析结果表明,稳定平台在载机降落的极限工况时,平台所承受的最大应力及位移满足设计要求。
3)动力学分析主要进行模态分析和随机振动分析,模态分析得出台体结构的固有频率为154.56Hz,大于螺旋桨式无人机飞行时的基频,避免共振。随机振动分析了稳定平台在螺旋桨振动激励的条件下,平台结构应力及位移量满足设计要求。CZ5H型雷达天线稳定平台结构设计及材料选择合理,有限元分析为稳定平台的设计提供了理论支持。
[1]吴一戎,朱敏慧.合成孔径雷达技术的发展现状与趋势[J].遥感技术与应用,2000,15(2):121-123.
[2]贺李平,李军兴,刘铭.机载SAR天线座结构动力学建模及分析[J].雷达学报,2012,1(2):203-207.
[3]宋浩,薛华夏,俞竹青.SR3-600型焊接机器人结构的静力学动力学分析和拓扑优化[J].机械设计与研究,2016,8:50-53.
[4]王凯,周慎杰.80吨履带起重机桁架式臂架系统的有限元分析[J].机械设计与研究,2005,10:88-91.
[5]赵军友,付建伟,赵路豪.节能注水增压泵的有限元仿真分析与优化设计[J].现代制造工程,2016,12:94-98.
[6]吴晓枫,王禹林,冯虎田.大型数控螺纹磨床床身的模态分析与优化[J].机械设计与研究,2010,12:114-117.
[7]GJB 150.16A-2009军用装备实验室环境试验方法第16部分:振动试验[S].北京:中国人民解放军总装备部,2009.
[8]武敏,谢龙汉.ANSYS Workbench有限元分析及仿真[M].北京:电子工业出版社,2014.
