一种新型的电动自行车无刷直流电机转子位置检测法
2018-01-18李化影迟长春吕腾飞
李化影,迟长春,吕腾飞
(上海电机学院 电气学院,上海 200240)
电动自行车作为一种绿色环保的短途交通工具越来越受到人们的青睐。无刷直流电机作为电动自行车的关键部件[1],其控制技术的研究已成为重要研究方向。
目前无刷直流电机的无位置传感器控制已有大量研究成果,主要有反电动势检测法、磁链估计法、基于观测器法等[2]。其中反电动势过零点检测法是应用最广泛、技术最成熟的一种方法[3],反电动势过零点检测法是通过无刷直流电机的相电压与虚拟中性点比较得出反电动势过零点,然后估算反电动势过零点之后转子转过30°电角度所需的时间而得到理想换相点[4-5],但其估算过程会导致换相点误差的存在。针对反电动势过零点检测法的不足,本文提出一种新的基于反电动势比较法的换相点捕捉方法,进而提高无刷直流电机换相的准确性和快速性。
1 无刷直流电机的工作原理
图1所示为无刷直流电机的控制系统原理图[3]。

图1 无刷直流电机控制系统原理Fig.1 Brushless DC motor operating principle
为使电动自行车运行的更加平稳,本设计采用换相转矩脉动较小的两两导通方式。各个功率管的导通顺序是 VT1VT2→VT2VT3→VT3VT4→VT4VT5→VT5VT6→VT6VT1→VT1VT2→…,依次循环,图 2 所示为一个周期内全部合成转矩的方向。

图2 一周期合成转矩矢量Fig.2 A cycle of synthetic torque vector
2 基于反电动势比较的换相点检测方法分析
2.1 换相点检测原理
本文设计的基于反电动势比较换相点的捕捉简化电路如图3所示。三路相电压经滤波后,A相电压和延迟后的C相电压通过比较器比较得到A相的换相点信号,同理得到B相和C相的换相点信号。

图3 换相点检测电路Fig.3 Commutation point detecting circuit
图4所示为A、C两相反电动势比较图,现以A、C两相来说明本设计的换相点检测原理。由无刷电机的控制原理可知,两相反电动势的交点为理论最佳换相点,即ea=ec。假设在理论最佳换相点处,A、C两相电流相等,即ia=ic。无刷直流电机在正常运行过程中,电机的三相绕组电压方程可简化为

式中:Ux为无刷直流电机的 x相的相电压,x=a,b,c;ix为无刷直流电机的 x 相的相电流,x=a,b,c;ex为无刷直流电机的x相的反电动势,x=a,b,c;R 为定子三相绕组的电阻;M为相绕组之间的互感;L为三相绕组的自感;P为微分算子。
由式(1)可知,Ua=Uc。由于电机定子绕组的反电动势不能直接测量,由以上分析可知,在A相的最佳换相点处,A相和C相的相电压相等,故可通过测量定子绕组的相电压来直接捕捉换相点,即换相点为两相电压相等的时刻。

图4 A、C两相反电动势比较Fig.4 Counter electromotive force comparison of A、C phase
以上分析的结论是建立在假设两相电流ia=ic的基础上,但实际检测到A相换相点之前,A、C相电流不相等。图5为无刷直流电机理想的三相反电动势波形与电流波形关系图。图5中D点处B、C两相处于导通的状态,下一个导通状态是A、B两相,电机控制系统正在检测A相的换相点。在检测到换相点之前,即图5中D点位置,各相电流分别为ia=0,ib=-I,ic=I,I为相电流。此时 A、C 两相电流不相等,此时换相点不能被检测到。为使检测换相点前两相电流相等,进而能使用相电压来直接捕捉换相点,故本设计将C相的反电动势波形延迟(360-θ)°,0°≤θ≤30°。如图6所示,在A相反电动势和延迟后的C相反电动势交点E处,ea=ec,ia=ic=0,由上述分析可知Ua=Uc,即得ea=ec,从而确定换相点。
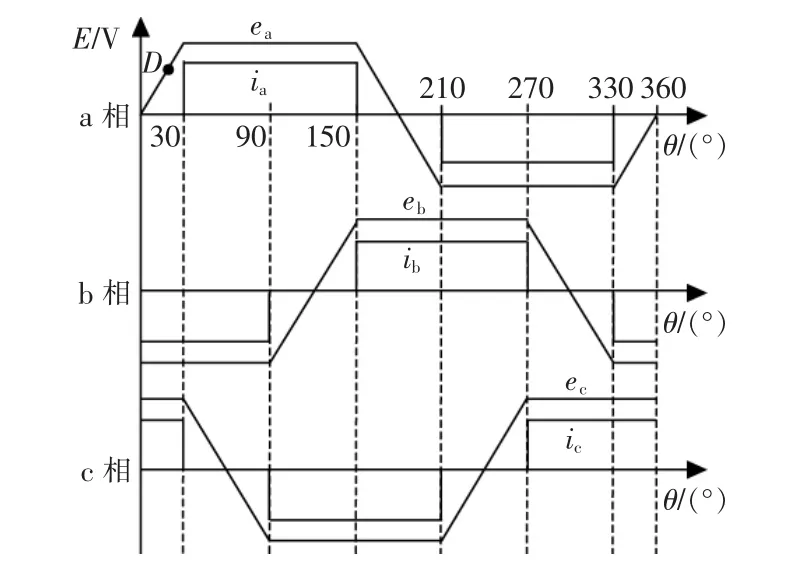
图5 无刷直流电机理想的三相反电动势波形与电流波形关系Fig.5 Brushless DC motor ideal counter electromotive force waveform and a current waveform

图6 A相反电动势和移相后的C相反电动势波形Fig.6 EMF of A phase and phase-shifted EMF of C phase
由图6可知,在一个周期内,A、C两相反电动势波形有2个交点,根据分析2个交点处对应的相电压波形相交。图7为A、C两相电压仿真波形图,A、C两相电压波形在一个周期内有且只有2个交点。由此证明了A、C两相电压波形交点与A、C两相反电动势波形的交点一一对应。
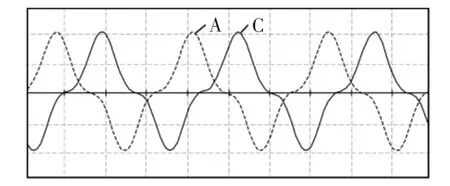
图7 A、C两相电压仿真波形Fig.7 Voltage waveform simulation of A、C phase
2.2 无刷直流电机换相点可变化范围的理论分析
由于低通滤波器的存在,上述电路得到的换相点会比理想最佳换相点滞后一定的电角度。这种滞后是否会影响有效快速地换向,针对此问题,本设计通过理论分析加实验方式进行验证。图8所示为三相反电动势波形与电流波形的关系。
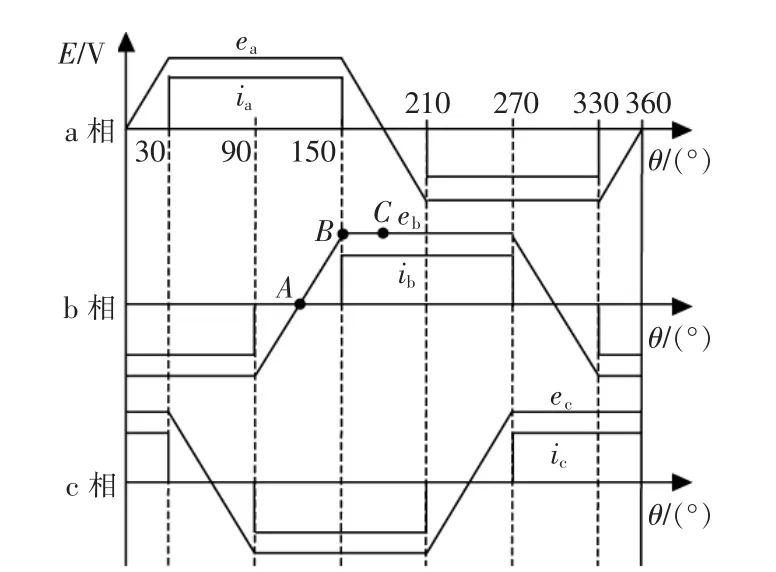
图8 三相反电动势波形与电流波形关系Fig.8 Three back EMF waveform and current waveform
由图8可知,最理想换相点为B点,在反电动势过零点后的30°电角度的位置[4]。假设电机磁极对数为 1,电机转子初始位置如图 9(a)所示,AX、BY和CZ为电机三相定子绕组,连接方式为星形连接。图9中,Fa与Fb分别为a、b相定子电流产生的磁势,Fs为Fa与Fb的合成磁势,Fr为转子永磁体产生的磁势。由于定子合成磁势与转子磁势夹角为90°时产生的转矩最大[6]。无刷直流电机驱动电路的换相周期为60,所以无刷直流电机在理想换相点换相时,驱动电路每个周期的导通区间为Fs与Fr夹角为60°~120°的区间时,一个换相周期内转子始末位置如图9所示。图9(a)为一个导通状态之初转子的位置,图9(b)为一个导通之末转子的位置,此时换相点为定子绕组不导通相的反电动势过零点后30°的位置,即图8中B点。

图9 A点换相时一个换相周期内转子始末位置示意Fig.9 Position of the rotor in a period at A point commutation
当驱动电路每个周期的导通区间为Fs与Fr夹角为90°~150°的区间时,即A点换相模式,德国MK项目的BL-Ctrl电调方案研究证明,A点换相时无刷直流电机能够正常工作,但与理想换相位置比较,电机在A点换相模式下工作时效率略低,此时的换相点为定子绕组不导通相的反电动势过零点,即图8中A点。同理当驱动电路每个周期的导通区间为Fs与Fr夹角为30°~90°的区间时,即C点换相模式,此时的换相点为定子绕组不导通相的反电动势过零点后60°电角度的位置,即图8中C点。
综上所述,可接受的换相点变化区间为定子绕组不导通相的反电动势过零点到过零点后60°电角度的区间,即图8中A点到C点之间的区间。故可通过调节电路参数,保证实际换相点在理论换相点的前后30°电角度之内,都可以实现电动自行车无刷直流电机的成功换相。
3 仿真结果分析
为验证上述基于反电动势比较法的换相点拥捉电路的有效性,本文用仿真软件Multisim建立仿真系统。电机参数为电机极对数p=6、额定电压UN=48 V、转矩常数K=0.03、速率常数Kn=0.03、定子电阻R=0.6 Ω、定子电感L=0.15 mH。图10所示为电机转矩为0.1 N·m、转速为3000 r/min时A、C两相电压经过换相点检测电路中低通滤波器之后的仿真波形。其中,Ⅰ是经过滤波后进入比较器的A相电压波形,Ⅱ是经过滤波并延迟移相(360-θ)°后的C相电压波形。图11所示为电动自行车的理想换相点和实际换相点的比较波形。图中Ⅰ为无刷直流电机中霍尔传感器输出换相位置的波形,即理想换相点捕捉波形。Ⅱ为本文设计的换相点捕捉电路输出换相位置的波形,即实际换相点捕捉波形。其中,方波跳变的位置即为换相点,本仿真结果验证了本文设计的基于反电动势比较法的换相点检测方案和电路的正确性。
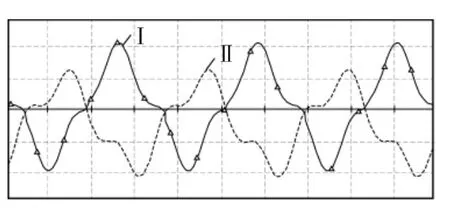
图10 A、C两相电压比较电路输入波形Fig.10 A、C two phase voltage comparison circuit input waveform
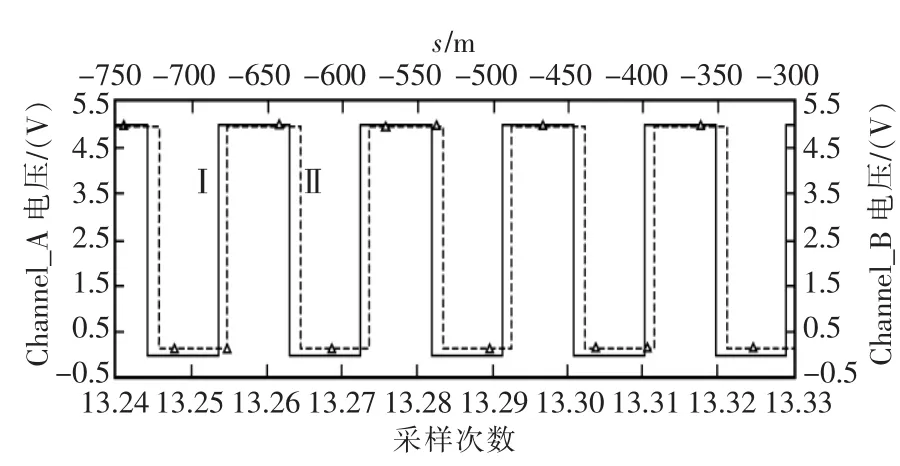
图11 理想换相点捕捉波形及实际换相点捕捉波形Fig.11 Ideal commutation point capture waveform and actual commutation points capture waveform
4 实验结果分析
4.1 换相点检测测试
图12和图13为基于反电动势比较法换相点捕捉电路中比较器的输入输出波形,其中Ⅰ为A相电压滤波后的波形,Ⅱ为C相电压经过滤波并延迟移相后的波形,Ⅲ为比较器的输出波形,方波跳变的位置即为电机绕组换相的位置。第2部分分析可知,图12中,两相电压波形的交点即为A相绕组的换相点。由图13可知,比较器输出方波的跳变位置正对应图12中两相电压波形的交点。所以比较器输出方波的跳变点即为A相绕组换相点。
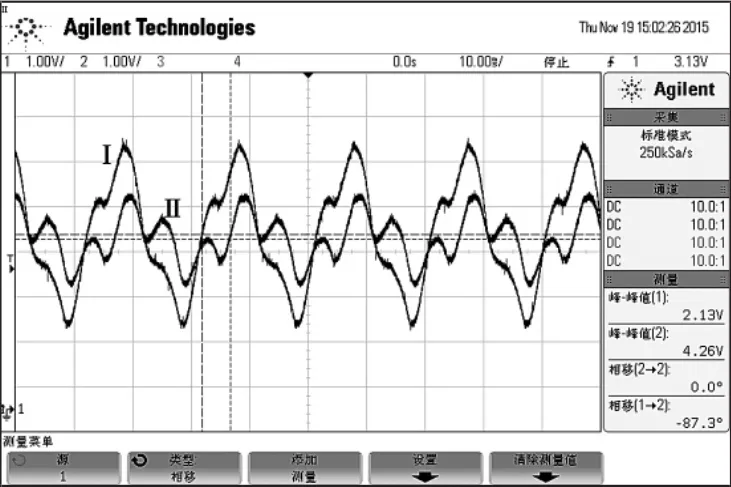
图12 比较电路输入波形Fig.12 Input waveform of comparison circuit
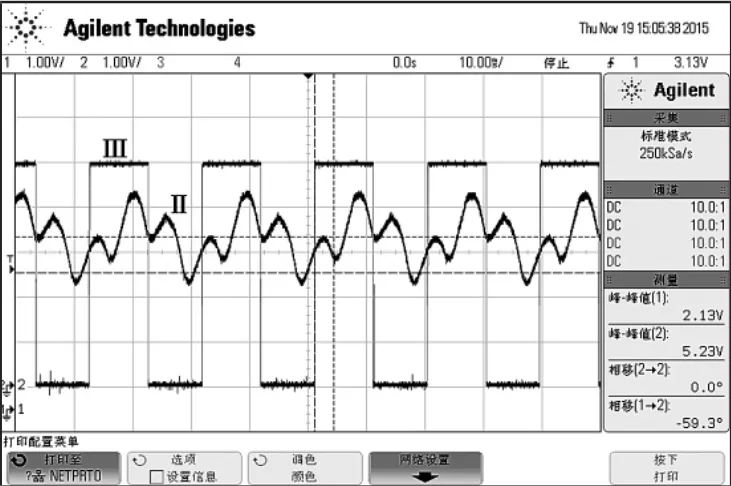
图13 比较电路输入波形和输出波形对比Fig.13 Input waveform and output waveform of the compare circuit
图14和图15分别为电机低速运转和高速运转时,本设计换相点检测电路的输出波形和霍尔传感器检测电路的输出波形比较图。其中,Ⅰ为霍尔电路输出的换相点信号波形,Ⅱ为本文设计的基于反电动势比较法的换相点检测电路输出的换相点信号波形。两图中方波跳变的位置即为换相点。
从图14和图15可以看出,由于低通滤波器的存在,本设计检测电路输出的换相点信号波形与理想换相点信号波形存在一定误差。当电机低速运行时,测得的换相点滞后理想换相点3.7°电角度;高速运行时,测得的换相点滞后理想换相点13.1°电角度[7]。换相点滞后电角度在分析的可变化范围内,故无刷直流电机可以正常工作[8-10]。

图14 低速时换相点捕捉信号与霍尔信号Fig.14 Commutation point capture signal and hall signal when motor run on low speed

图15 高速时换相点捕捉信号与霍尔信号Fig.15 Commutation point capture signal and hall signal when motor run on high speed
4.2 电动自行车无位置传感器控制系统调速范围测试
图16为电动自行车控制系统在转把调节状态下的速度曲线。实验中设定负载转矩为15 N·m,在转把的调节下,电机的速度逐渐加速到最大值,再降到最小值。由图16可知,电机转速的最大值为342 r/min,当电机速度降到25 r/min时,调速曲线出现波动,电机速度迅速降到0 r/min。分析可知,当电机转速过低时,反电动势不易检测,控制系统不能准确捕捉到电机的换相点,导致电机换相失败[11-12]。
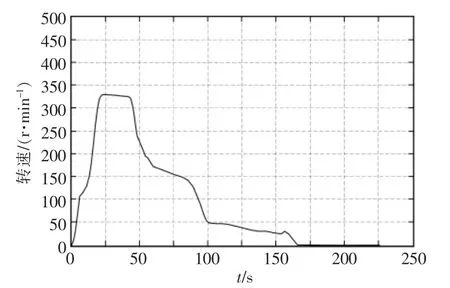
图16 无位置传感器控制系统调速曲线Fig.16 Speed control curve of sensorless control system
5 结语
电动自行车无刷直流电机无位置传感器控制策略中换相点捕捉的准确性和快速性,对电动自行车的运行性能至关重要[13]。本文提出的采用反电动势比较法直接得到无刷直流电机的换相点,从理论和实验都证明了该法能够快速准确实现换相点捕捉;与现有的反电动势过零点检测法相比较,该方法省略了其软件估算环节,既避免了估算环节造成的误差,又简化了无刷直流电机无位置传感器控制系统的结构,提高了换相捕捉的准确性和快速性,使电动自行车运行更加平稳,控制更加灵敏。
[1]侯铮.智能电动执行机构无刷直流电机控制系统研究与设计[D].湖南:中南大学,2010.
[2]宋海龙,杨明,范宇,等.无刷直流电动机的无位置传感器控制[J].电机与控制学报,2002,6(3):33-37.
[3]李娜,苏永新.无位置传感器直流无刷电机控制关键技术研究[J].数字技术与应用,2013(6):17-19.
[4]Zicheng li,Shanmei Cheng,Yi Qin,et al.A novel line-to-line back EMF calculation for sensorless brushless DC motor drives[C]//Department of Control Science and Engineering Huazhong University of Science and Technology,China,2008:1406-1407.
[5]付永余.无位置传感器无刷直流电动机控制系统的设计[D].西安:西安科技大学,2010.
[6]Islam M.N.Sensorless position control for piezoelectric actuators usinga hybrid position observer[J].Mechatronics,IEEE.ASME Transactions on,2014,19(2):667-675.
[7]Wenchun Chi,Mingyang Cheng.Implementation of a slidingmode-based position sensorless drive for high-speed micropermanent-magnetsynchronousmotors[J].ISA Transactions,2014,53:444-453.
[8]周文军.基于自适应算法的无刷直流电机控制器的研究与设计[D].上海:东华大学,2014.
[9]郭鹏.基于DSP的全数字无刷直流电机控制器的设计与研究[D].西安:西北工业大学,2004.
[10]邹利平,杨向宇,曹江华.无刷直流电动机无传感器转子位置估计方法[J].微电机(伺服技术),2006,39(1):19-21.
[11]马莹.无位置传感器永磁无刷直流电机控制系统的设计[D].辽宁:沈阳工业大学,2013.
[12]X.z.zhang,Y.N.Wang.A novel position-sensorless control method for brushless DC motors 2009[J].Energy Conversion and Management,2011(52):1669-1676.
[13]李志强,夏长亮,陈炜.基于线反电动势的无刷直流电机无位置传感器控制[J].电工技术学报,2010,25(7):38-44.
