基于线性自抗扰的核电站蒸发器水位多模型控制
2018-01-18李晨晶叶建华
李晨晶,叶建华,赵 明
(上海电力学院 自动化工程学院,上海 200090)
核电站蒸汽发生器(SG)水位被控对象具有非线性、时变性、不确定性和变工况等特点,因而很难用统一、精确的数学模型来表示,系统的“内扰”和“外扰”都可能引起水位大幅度波动,且有明显的“虚假水位”现象。因此很难确保SG水位的有效控制。
自抗扰控制(ADRC)具有抗扰动能力强、鲁棒性好、不依赖数学模型等优点。文献[1-2]中,自抗扰控制被用于SG水位控制,控制效果较好。但ADRC中需整定的参数较多,整定时没有确定的规律,通常采用试凑法;文献[3]将ADRC从非线性形式简化为线性形式(LADRC),拥有ADRC的优点,控制器参数也大量减少,整定方法简单;文献[4]中提到了降阶线性自抗扰(RADRC),比LADRC鲁棒性更强、系统稳定范围更大。同时蒸汽发生器水位动态特性随负荷变化,而多模型控制能有效解决变工况、强扰动、参数不确定性等问题。为此,将线性自抗扰控制和多模型控制策略结合,用于SG水位的控制更具有对症下药的效果,可以获得更加优越的控制性能。
1 蒸发器的水位特性
本文采用E.Irving提出的蒸汽发生器数学模型[5]。它通过多个建立在典型负荷下的模型来表示:

式中:Gw(s)为给水流量;Gs(s)为蒸汽流量。式中的参数随负荷变化,不同负荷下所对应的模型参数如表1所示。

表1 蒸汽发生器典型工况下参数Tab.1 Typical power point parameters for steam generator model
在蒸发器水位的控制过程中,主要影响因素有给水流量、蒸汽流量。当蒸汽流量为0时,给水流量对水位的影响为

同样,当给水流量为0时,蒸汽流量与水位间的关系为

图1、图2所示分别为给水流量、蒸汽流量发生阶跃变化时,蒸汽发生器在特定工况下的水位响应曲线。可看出给水流量、蒸汽流量对水位均表现出积分特性,即蒸汽发生器水位在静态时没有自平衡能力,且都呈现出较严重的“虚假水位”现象。不同功率时,曲线变化方向相同,幅值大小不同,滞后时间也不同,功率越低,幅值越大。

图1 给水流量阶跃变化时蒸汽发生器水位的响应Fig.1 Response of water level with step disturbance of feed water flow at different loads

图2 蒸汽流量阶跃变化时蒸汽发生器水位的响应Fig.2 Response of water level with step disturbance of steam flow at different loads
2 线性自抗扰
2.1 线性自抗扰控制
图3所示为二阶线性自抗扰控制器的系统结构框图。其中y、r分别为系统的输出和参考输入,d为系统的外扰,Gp为被控对象,扩张观测器(ESO)实时估计系统的响应状态和干扰,Kp、Kd为线性反馈控制率参数,b0为控制器中对系统输入增益b的估计[6]。
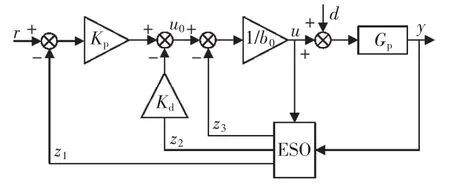
图3 二阶线性自抗扰结构Fig.3 Structure diagram of second order linear active disturbance rejection control
假设Gp(s)可被近似为一个二阶模型,即:

式中:w为系统不可测扰动;g为系统自身扰动和外部扰动的总影响;b为输入增益。或表示为

式中:f=g+(b-b0)u为系统总扰动,此时将b0对b的估计误差也看成扰动的一部分。并且将f定义为系统的一个扩张状态,使x3=f。假设f可微,定义则式(5)可以用状态空间表示为

根据现代控制理论,误差 e=y-z1,则的估计值可通过线性扩张状态观测器(ESO)得到:
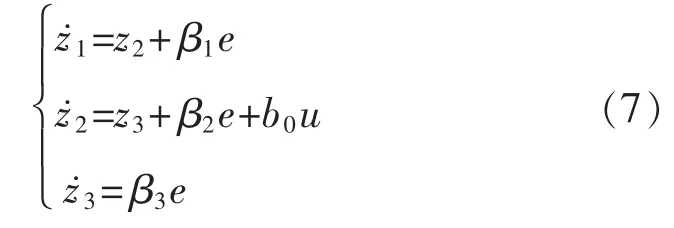
式中:z1、z2、z3为的估计值, β1、 β2、 β3为需要确定的线性扩张状态观测器参数,控制估计值的准确性。文献[6]中,定义w0为观测器带宽,则线性扩展观测器的误差系统特征方程为

因而,可通过调整观测器的带宽来控制观测精度。
由图3可知,扰动补偿环节为

当线性扩张状态观测器能够实现f=z3时,将其代入式(5),可得即控制系统被转换为 2 个积分串联环节。
线性反馈控制律为


由以上分析可知,线性自抗扰控制器参数可简化为 w0、kp、kd、b0,较非线性自抗扰少了很多。观测器带宽w0影响观测器的精确性,w0越大,观测精度越高,但同时对噪声也越敏感。kp主要影响系统的响应速度,kp越大,系统的响应速度越快,但系统容易产生超调,系统的稳定性变差。kd影响系统的准确性,随着kd的增大,系统的超调量减小。b0控制系统稳定性,不能过大,也不能过小。文献[7]给出了结论,依据各参数的影响,进行反复调整。
2.2 降阶自抗扰控制器
在设计过程中,ADRC中的时滞随着ESO阶次的增大而增大,不利于控制效果。因而,希望通过降低ESO的阶次来减小ADRC中的时滞。降阶观测器不需要对被控对象中的一些可测量量进行估计,只需对其他状态进行估计即可。文献[8]对降阶自抗扰控制器的特性进行了研究。
针对上述的对象,可设计如式(6)所示的二阶降阶状态观测器:

式中:yr为输出微分信号Lr为观测器的增益向量,其计算也可简化为观测器的带宽β1=2w0,β2=w02。选择适当的 w0可使 zr1→y˙,zr2→f。
控制率设计为

式(12)、式(13)、式(14)一起构成二阶降阶自抗扰控制。其中,w0、kp、kd、b0为要调节的参数,意义及选取方法与线性自抗扰控制相同。对LADRC整定的参数进行微调,即可得到理想的曲线。
3 基于模糊隶属度函数的多模型控制
实际运行中,蒸汽发生器运行在非典型工况时,可将工况划分为 0%~15%、15%~30%、30%~50%、50%~100%几个工作区间,将模糊隶属度函数和基于加权和的思想相结合起来定义权值。针对输入功率分别设计4个隶属度函数,输出控制器的加权值,分别为


应用模糊隶属度函数控制加权的具体思路如图4所示。首先针对各个典型工况,设计出对应的子控制器。根据给定工况,计算出设定好的隶属度函数所对应的加权值,然后与各子控制器相乘,经过加权处理的局部控制器再相加,得到该功率下的实际控制器。隶属度函数的设计,保证了每个工况下,至少有1个,最多有2个控制器作用,权值之和总为1。所有子控制器通过权值加权,构成全局总控制器来控制整个系统,使其达到全局稳定。

图4 模糊隶属度控制加权结构Fig.4 Structure diagram of weighted control based on fuzzy membership function
蒸汽发生器运行工况在0%~15%、15%~30%、30%~50%、50%~100%之间时,认为式(1)中参数呈线性变化,因此参数可设为2个工况的线性拟合[9]。为了使系统在非典型工况下也能稳定运行,根据现行变参数拟合模型进行模拟仿真。
4 仿真结果及分析
应用Matlab中的Simulink建立系统模型,进行SG水位控制过程仿真实验。先对典型工况进行分别设计。SG水位控制采用串级前馈的控制方式,主控制器分别采用 IMC-PID[10]、LADRC、RADRC,副控制器为比例控制器,Kp=1.11。前馈控制器在低功率时设置成1,但是在高功率时,水位的机械振荡非常厉害,要消除振荡必须重新设计前馈控制器,消除式(2)中的第三部分振荡项,设计得到的前馈控制器如式(19)所示,其中 λ=0.5[10]:

参数调整的结果如表2所示,随着负荷的增大,kp、b0增大,加快系统的响应速度,kd减小,保证了系统的准确性,使系统的快速性、准确性、稳定性相协调,得到较好的控制效果。在线性自抗扰的控制中,w0过大会引入噪音,因而在不影响控制性能的前提下尽量减小w0。RADRC与LADRC相比较,在控制性能相同的情况下w0减小,系统鲁棒性更强,稳定范围更大。

表2 LADRC/RADRC参数整定结果Tab.2 Parameter tuning of the LADRC/RADRC
分别给系统加入100 mm的给水阶跃值和5%的蒸汽流量扰动。以100%负荷和40%负荷为例,100%负荷时,SG的被控对象模型为

图5、6分别为100%负荷下水位的阶跃响应和蒸汽流量扰动响应曲线。40%负荷时,根据现行变参数拟合的被控对象模型为

其仿真响应曲线分别如图7、图8所示。

图5 100%负荷时水位的阶跃响应曲线Fig.5 Response of water level with step disturbance at 100%load
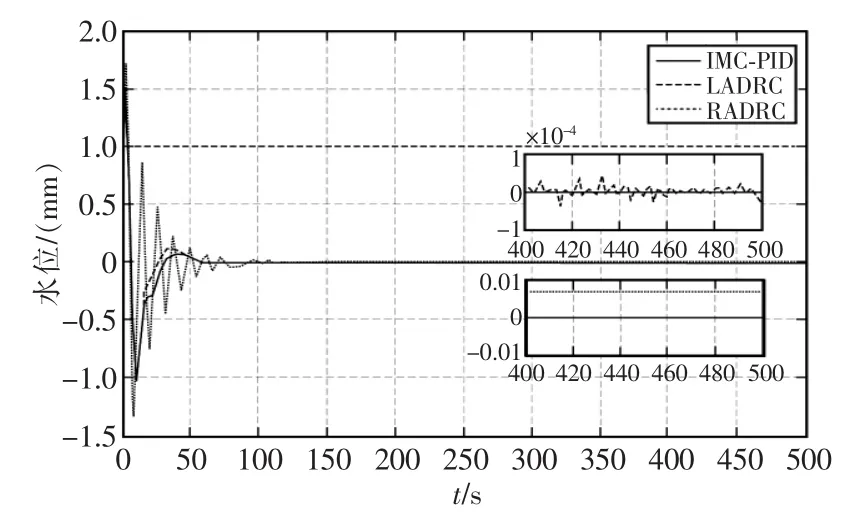
图6 100%负荷时蒸汽流量阶跃扰动响应曲线Fig.6 Response of water level with step disturbance of steam flow at 100%load

图7 40%负荷时水位的阶跃响应曲线Fig.7 Response of water level with step disturbance at 40%load

图8 40%负荷时蒸汽流量扰动响应曲线Fig.8 Response of water level with step disturbance of steam flow at 40%load
可看出,典型或非典型工况下,LADRC、RADRC大大地缩短了调节过程时间,克服蒸汽流量扰动的能力增强,到达稳态的时间短、振动幅度小、无稳态误差,且对“虚假水位”现象也有一定改善。RADRC与LADRC相比较,在控制效果基本相同的情况下,降低了观测器带宽,有效避免观测器带宽过大时引起的振荡现象且状态估计更准确。
5 结语
通过仿真及与PID控制的比较,本文采用的方法能获得更好的控制效果。LADRC、RADRC结构简单、易于实现,可实时观测模型内扰和外扰,并进行补偿控制,不依赖模型,响应速度加快,减小了“虚假水位”的影响,对蒸汽流量的控制,无稳态误差,振动幅度小。而RADRC拥有LADRC的优点,控制效果相同的情况下,减小、避免了抖振现象。多模型控制策略有效地解决了对象参数时变等因素对系统控制带来的困难,能很好地适应大范围变工况的控制。可考虑将降阶自抗扰与多模型相结合,为SG水位的控制提供了新的方法。
[1]陈红,曾建,王广军.蒸汽发生器水位的自抗扰控制[J].中国电机工程学报,2011,30(32):103-107.
[2]顾俊杰,冀乃良,孙玉洁.核电站蒸汽发生器水位的自抗扰多模型控制方法研究[J].动力工程学报,2012,32(5):373-377.
[3]Gao Z Q.Scaling and bandwidth-parameterization based controller tuning[C]//Proceedings of the American Control Conference,Denver,CO,United States:IEEE,2003(6):4989-4996.
[4]Tian G.Reduced-order extended state observer and frequency response analysis[D].Cleveland:Cleveland State University,2007.
[5]Irving E,Miossec C,Tassart J.Towards efficient full automatic operation of the PWR steam generator with water level adaptive control[C]//London Proceedings of Conference on Boiler Dynamics and Control in Nuclear Power Stations,1980:309-329.
[6]陈星.自抗扰控制器参数整定方法及其在热工过程中的应用[D].北京:清华大学,2008.
[7]胡彬,应小昆,孙青林.线性自抗扰技术在热处理电阻炉中的应用[C]//Proceedings of the 33rd Chinese control conference,Nanjing:2014.
[8]王传榜.一类非平衡负载系统的自抗扰控制[D].合肥:中国科技大学,2015.
[9]Kothare MV,Mettler B,Morari M,et al.Linear parameter varying model predictive control for steam generator level control[J].Computers&Chemical Engineering,1997,21(1):861-866.
[10]马利飞.核电机组蒸汽发生器水位特性分析及优化控制[D].北京:华北电力大学,2012.
