一种高性能液体转移监控系统的研制
2018-01-18胡传皓曾国强葛良全
陈 川,胡传皓,曾国强,葛良全
(1.成都理工大学 信息科学与技术学院,成都 610059;2.成都理工大学 核技术与自动化工程学院,成都 610059)
近年来,工业生产中的自动液料供给系统逐步为社会所需求,如冶金、化工、炼油、锅炉供水的水位调节装置等。传统的配料系统由人工完成,精确度不高、工作效率低而且浪费资源,为减轻工人的劳动强度、提高工作效率、摆脱机械式的手工操作,寻求一种简单、精确、轻便灵活的解决办法是十分必要的。本文所述的液体转移监控系统即可较好地满足上述的要求。本系统由液体称重单元、检测和信号处理单元、控制单元和水泵驱动单元构成,采用PID控制算法实现液料的快速平稳转移。本系统体积小、安装方便、操作简单、使用灵活,且可通过RS485接口实现主机从机的组网管理,可以同时进行多点的液料集中控制,满足现场工业控制的要求。
1 系统整体设计方案
本文所设计的液体转移监控系统以AD7705型[1]模数转换芯片以及ATmega16型单片机为核心,包括信号检测单元、信号放大与模数转换单元、数据处理单元、直流水泵驱动单元、液晶监控显示单元以及供电单元。总体设计框图如图1所示,下文将对各个单元的作用及实现方式进行详细说明。
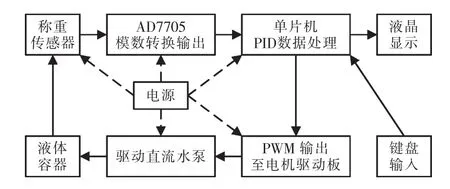
图1 系统总体设计框图Fig.1 Design diagram of the system
2 信号检测与转换单元
本文所设计的信号检测与转换单元主要由称重传感器和信号放大与转换器构成。其中传感器部分能够将液体重量转换为电压信号,放大与转换器部分能够将幅值较小的模拟电压信号精确地转换为数字信号,进而提供给后级单片机进行数据处理。
2.1 信号检测单元
本文所设计的信号检测单元采用了型号为FAK-1系列的称重传感器,其灵敏度高、温漂小且采用5 V工作电压,因此是将液体重量值转换为电信号的理想器件。在本设计中,为了刻度液体重量与左、右传感器电压值之间的关系,分别选取不同重量的液体进行测量,最终得到表1所示数据。在实际应用中,通过对比左、右传感器所测得的电压值即可推算出相应的液体重量信息,从而实现对液体重量信息的获取。

表1 液体重量与左/右传感器输出电压值对应表Tab.1 Liquid weight and left/right sensors output voltage value corresponding table
2.2 信号转换单元
由于信号检测单元所获取到的信号为模拟电压信号,因此需要将该信号进行模数转换才能在后级单元进行处理,该转换单元的电路如图2所示。从图中可知,该单元以16位分辨率的AD7705型模数转换芯片为核心,采用双通道全差分模拟输入,+5 V单电源供电,主要应用于低频测量。由于该芯片采用了Σ-Δ转换技术,因此具有16位无丢失代码性能,同时该芯片具有三线数字接口,因此可以通过串行输入接口由软件配置芯片的增益值、输入信号极性和数据更新速率,使得设计灵活方便。此外,该芯片具有自校准和系统校准功能,能够消除器件本身和系统的增益以及偏移误差[2]。
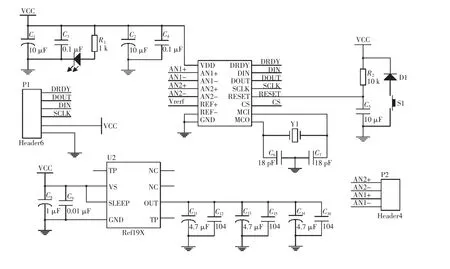
图2 信号放大与转换器电路Fig.2 Circuit of signal amplifying and converter
前级传感器获得的两路模拟输入信号通过接口AN1+/-、AN2+/-输入,在SCLK时钟下,只需要通过串行输入DIN接口依次读/写设置寄存器、时钟寄存器即可设定某通道所需的增益倍数、更新速率、单/双极性等,数据寄存器中的数据由DOUT串行输出接口输出。因为传感器输出电压的幅值为毫伏级,故本设计将AD7705设定为单极性、增益128、更新速率为25 Hz。同时为了保证AD7705的分辨率,本设计采用了REF192型高精度2.5 V基准源,从而确保系统具有优异的性能。
3 直流水泵驱动单元
直流水泵作为液体的转移执行单元,可以通过设置不同的直流电压值来实现水泵流量的控制[3]。本设计选用了成都为诚电子ASP2015型直流水泵,其工作电压低,且具备稳定自吸功能,具有自吸速度快、流量大、体积小、重量轻、安装方便等特点,在应用中可以通过改变通断时间来改变流量,达到控制的目的,该水泵的具体参数如表2所示。

表2 ASP2015型直流水泵参数Tab.2 DC water pump parameters of ASP2015
实现直流水泵的注水速度的调节一般有2种方式,一种是采用数模转换器+甲乙类功率放大器[4]组成的线性驱动方式;一种是采用PWM调制+H桥驱动电路的开关驱动方式。本文选用开关驱动的方式,该方式可以大大提高驱动效率,同时减少了散热要求,其电路如图3所示。从图中可知,该直流水泵驱动单元由H桥驱动电路、外围保护和整流电路组成,其中IRF540N和IRF9540是高电压、大电流的功率场效应对管,其高速的开关频率使其在直流水泵制动控制中可产生较大的锁定电流,能瞬时停住直流水泵,稳定性很强。同时用单片机控制场效应管使之工作在占空比可调的开关状态,可精确调整电动机转速。占空比增加,直流水泵转速加快,加大入口注水流量,反之直流水泵转速减慢,减少入口注水流量,最终实现动态平衡,达到设定重量值。
4 电源供电单元
为了保证AD7705的分辨率,本文采用线性电源供电,线性电源负载响应快、可靠性高、外围元件少、输出噪声小,使用大电流输出的金属封装7805,可以提供整个控制系统5 V电压,最大输出电流可达3 A。而左、右两路称重传感器工作电压由双通道跟踪电源提供,其电路如图4所示。从图中可知,该电路以LM317与LF351型电源芯片为核心,采用双通道设计的方法保证了2个通道具有优异的跟踪特性,即当其中任意一路电压改变时,另外一路也会跟之变化,从而使得同时工作的两路称重传感器不会产生因工作电压不同而引起的误差,简化了数据处理过程。
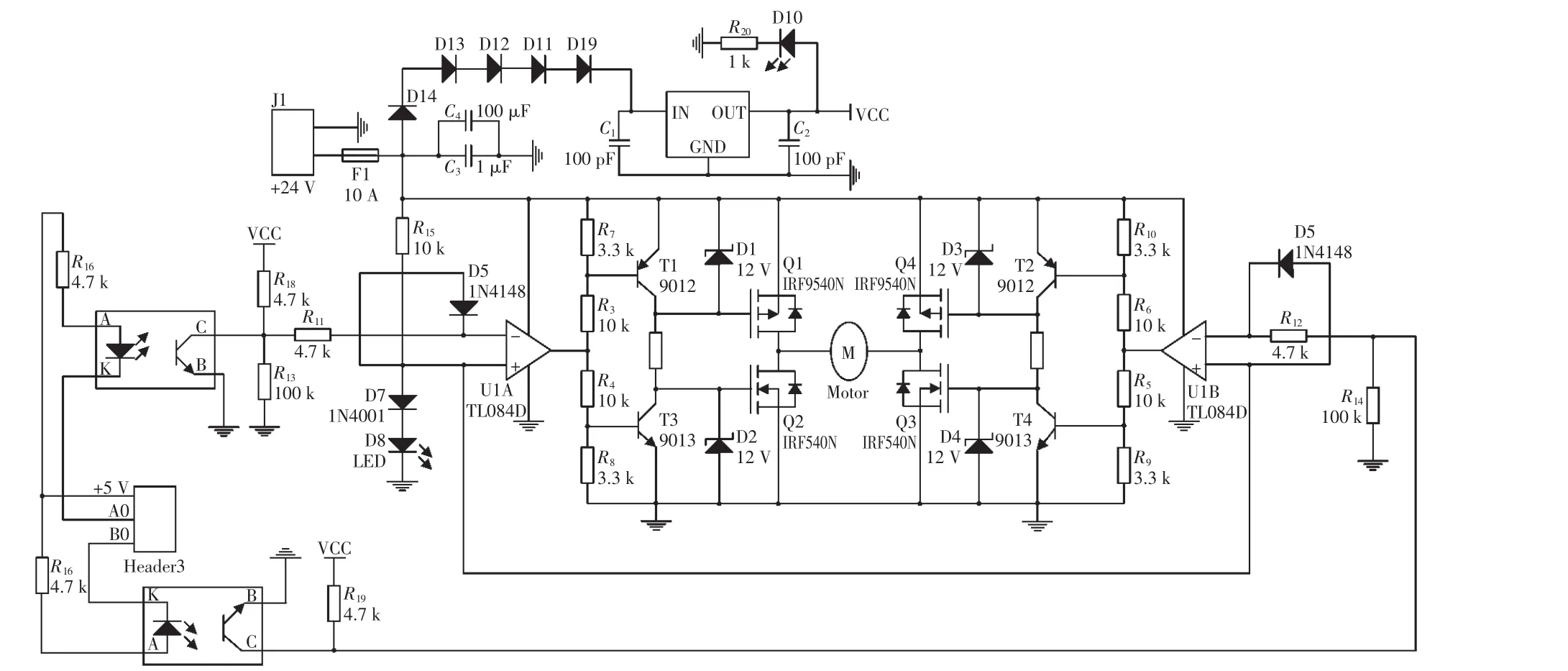
图3 H桥场效应管组成的直流水泵驱动电路Fig.3 DC water pump drive circuit composed of H bridge field effect tube

图4 双通道跟踪电源Fig.4 Dual channel tracking power supply
5 数据处理单元
本系统的主控芯片采用Atmega16单片机,该单片机具有16 K的片内可编程Flash,3个具有比较模式的定时/计数单元;8路10位具有可选差分输入级可编程增益的ADC,具有高速、灵活、端口多等特点,符合本设计的需求。
设定AD7705参考电压为Vref,传感器输出电压为Vout,AD7705数据寄存器值为N,增益选为128,故可得如下公式:

根据上式,通过单片机内部的运算,可以得到液体重量和N之间满足表3所示的关系。通过键盘设定好待保持的重量值,并在单片机内部将其转换为十进制数,通过比较AD7705左/右输出值N与该十进制数,即可知道瞬间液体重量是否达到设定值。若小于设定值则增加水泵PWM驱动脉冲占空比,提高入口注水流量;若大于设定值则减小水泵PWM驱动脉冲占空比,降低入口注水流量,实现调节占空比调节注水流量,每次调节的注水量大小由PID[5]算法来确定,最终实现动态平衡,迅速达到设定的重量值。

表3 AD7705转换信号N与称重传感器承受重量关系Tab.3 Switching signal relationship with weighing sensor to bear weight of AD7705
6 结语
本文设计的液体转移监控系统,能够实现单进单出容器的液面动态平衡,实测5 L圆柱型20 cm高容器从空状态到液面动态平衡状态所需时间小于2 min,最大液面稳态误差小于5 mm。本系统还可以实现多点组网监控,可满足化工现场的液料混合与转移的需求。
[1]陈勇钢,吴伯农.AD7705高精度数据采集的实现[J].国外电子测量技术,2006,25(1):38-40.
[2]魏志纲,裴红星.基于SPI总线的高精度力变送器[J].仪器仪表与分析检测,2006(3):9-10.
[3]曾国强,葛良全.机器人比赛中直流电机驱动电路的设计[J].微机算机信息,2008,24(14):236-238.
[4]周兴平.基于C8051F的模数转换及其在直流电机驱动系统中的应用[J].电子设计工程,2007(6):30-33.
[5]陈树权.PID控制在风洞风速调节中的应用[J].气动研究与实验,2008,26(2):11-16.
