远距多光轴平行度检测方法研究
2018-01-17王鑫白素平许庭赫
王鑫,白素平,许庭赫
(1.长春理工大学 光电工程学院,长春 130022;2.长春理工大学 电子信息工程学院,长春 130022)
集目标探测、跟踪、瞄准和激光发射为一体的激光发射系统在各种现代化平台上已得到广泛应用,为达到对目标的作用效果,系统的探测器视轴、瞄准轴、激光发射轴应保持较高的平行度[1-2]。而在众多的武器系统中,光轴间的距离有时会达到几米远,为其光轴平行度测量带来难度,设计一种远距离多光轴平行度检测方法,对提高光电武器性能有重要意义。
在已有的光轴检测方法中大都是通过五棱镜、斜方棱镜、平面反射镜等光学器件对平行光管出射光轴进行折射,使基准轴与被测轴可进入同一测量系统视场来实现的,但这些方法都存在一定的局限性,例如大口径平行光管法一般采用离轴抛物面反射镜和平面反射镜组成,其要求待测两光轴的距离不大于离轴抛物面反射镜的直径,对距离较远的光学系统,大口径平行光管法便无法测量[3-5]。
本文利用激光自准直仪的准直光束光轴替代被测发射系统的出射光轴,通过两激光自准直仪的互瞄得到光轴平行度的测量结果,检测机构的代入误差可通过标定测量被确定并修正,得到的检测结果具有较高精度,并且可测量其他光轴距离不同的光学设备,具有一定的适用性。实验结果表明:检测结果与约定真值10″的偏差在2″以内,满足使用要求,方法可行。
1 测量原理
由激光自准直仪的测量方法可知,激光光束通过小孔光阑后,经过分光棱镜分光,一路经准直物镜准直为平行的准直光束射出,经过放置在被测物上的测量反射镜反射后,由准直物镜会聚,经分光镜成像于CCD像面上,当反射镜发生角度变化时,圆孔在CCD像面所成的像将产生线位移,由此可计算相应角度,当反射镜倾斜微小角度α角时,反射回来的光束与出射准直光束夹角为2α角[6]。同理,当有一束平行光射入激光自准直仪时,经过准直物镜与分光棱镜后会成像在CCD上,通过此像也可得到一个角度,此角度为这束平行光激光自准直仪出射准直光束的夹角。
基于上述原理,本文采用两套激光自准直仪构建测量光路,如图1所示,发射系统1发出的平行光α1经准直物镜、分光棱镜后在激光自准直仪1的CCD上形成一个光斑,其光斑中心记为点A,发射系统2发出的平行光α2经准直物镜、分光棱镜后在激光自准直仪2的CCD上形成光斑,光斑中心记为点B,将B设为基准点,调整激光自准直仪1的位置,使点A与CCD中心O重合,此时平行光α1与激光自准直仪1的出射准直光束的夹角为0,即平行光α1的光轴与此激光自准直仪准直光束的光轴平行,可由激光自准直仪1发出的准直光束代替发射系统1的出射光轴。将激光自准直仪1顺时针旋转90°,激光自准直仪2逆时针旋转90°,使两激光自准直仪互瞄(由于距离较远,旋转后激光自准直仪1发出的准直光束可能在激光自准直仪2的接受范围外,此时可通过高精度直线位移导轨平移激光自准直仪1,使准直光束射入激光自准直仪2中),激光自准直仪1发出的准直光束α3射入激光自准直仪2中在CCD上形成光斑图像,光斑中心记为点C,通过计算点B和点C的位置可得到角度值。
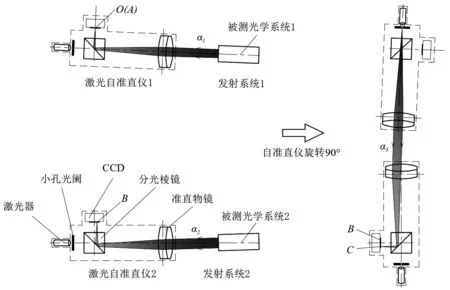
图1 系统工作原理图
为方便分析,对图1中给出的测量光路进行简化,按右手法则建立坐标系,并确立个坐标系之间相互关系,等效光路如图2所示[7]。准直物镜坐标系OoXYZ为固定坐标系,Z轴与主光轴重合,Oo点位于物镜中心,光电探测器位于s=f处(f为物镜焦距),像坐标系OXpYpZp,O置于CCD的中心,OXpYp位于CCD敏感面上,Zp与Z轴重合,两个坐标原点均在主光轴上,
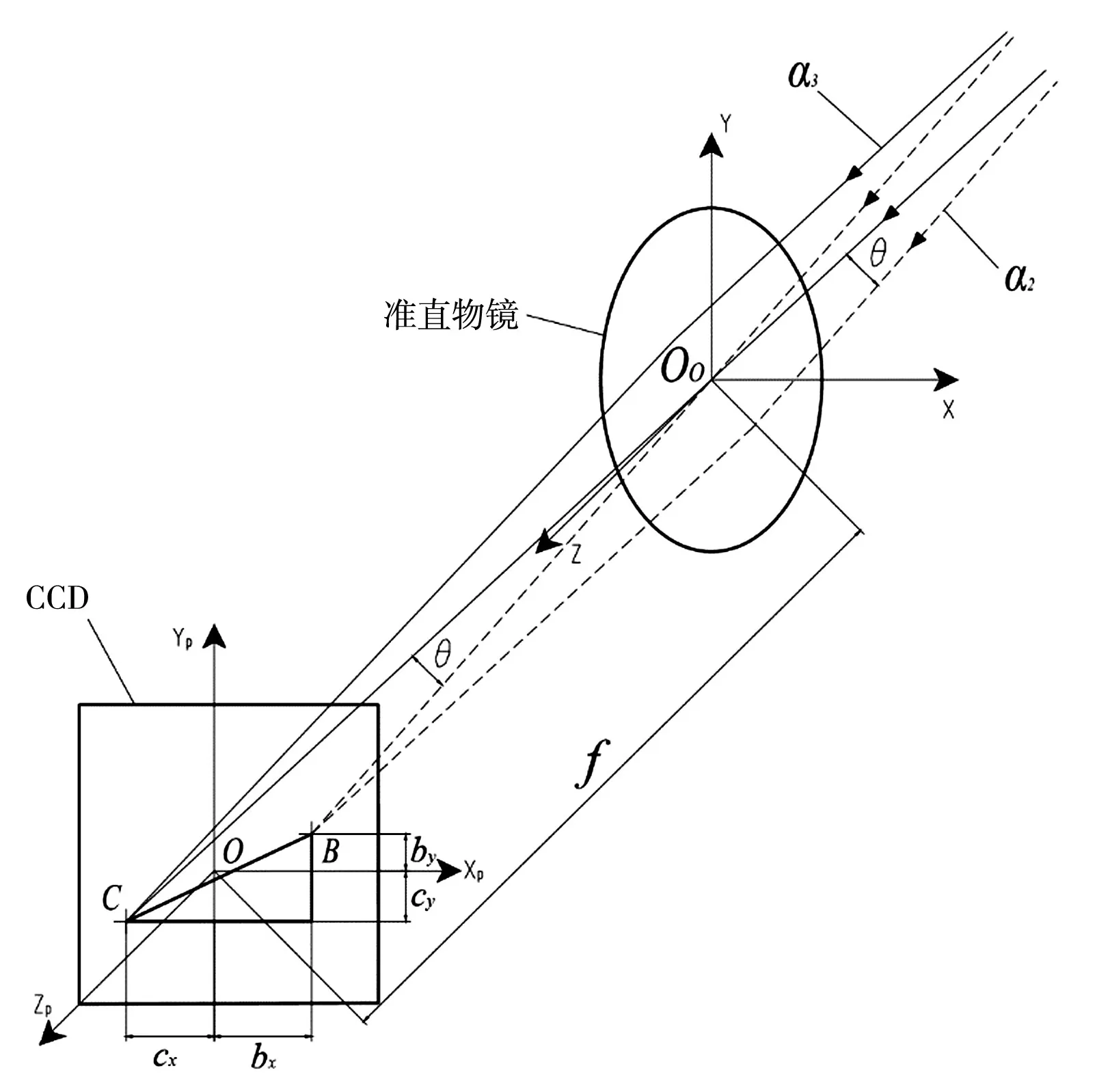
图2 等效光路
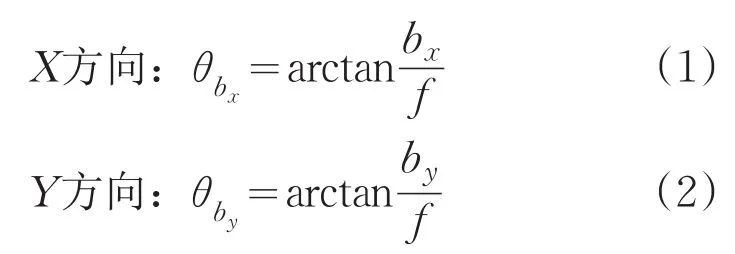
图2中平行光α2经准直物镜成像于B点,平行光α3经准直物镜成像于C点,则有B点坐标(bx,by)、C点坐标(-cx,-cy),根据B点可算出平行光α3与主光轴的夹角,将其分解为X方向和Y方向角度分量有:
同样对C点进行分解有:

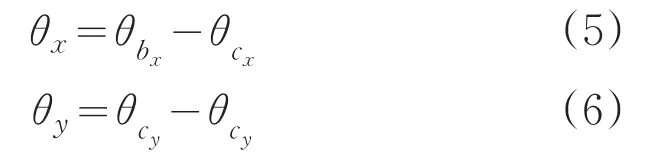
α2和α3之间的夹角θ的X、Y方向的分量为:
由三角函数公式可知α2和α3之间的夹角θ为:
式中,θ为平行光α2与激光自准直仪2的准直光束α3的空间角度,同时也是平行光α1与平行光α2的空间角度,实现了发射系统1和发射系统2的光轴平行度的测量。另外,由系统原理可知,左右两激光自准直仪相互独立,因此可根据具体情况调整左右两激光自准直仪的相对位置,从而适应不同距离的多光轴光电设备的光轴平行度测量,其最大距离与激光自准直仪的测量范围和高精度直线位移导轨的长度有关,测量范围越大、直线位移导轨越长,可测量的光轴距离越长。
2 模拟测量实验
2.1 实验组成
为了验证本文提出的测量方法,采用固体激光器、光学自准直仪、激光自准直仪、高精度位移台、转台及计算机等设备对上述方法进行了实验,实验装置如图3所示。
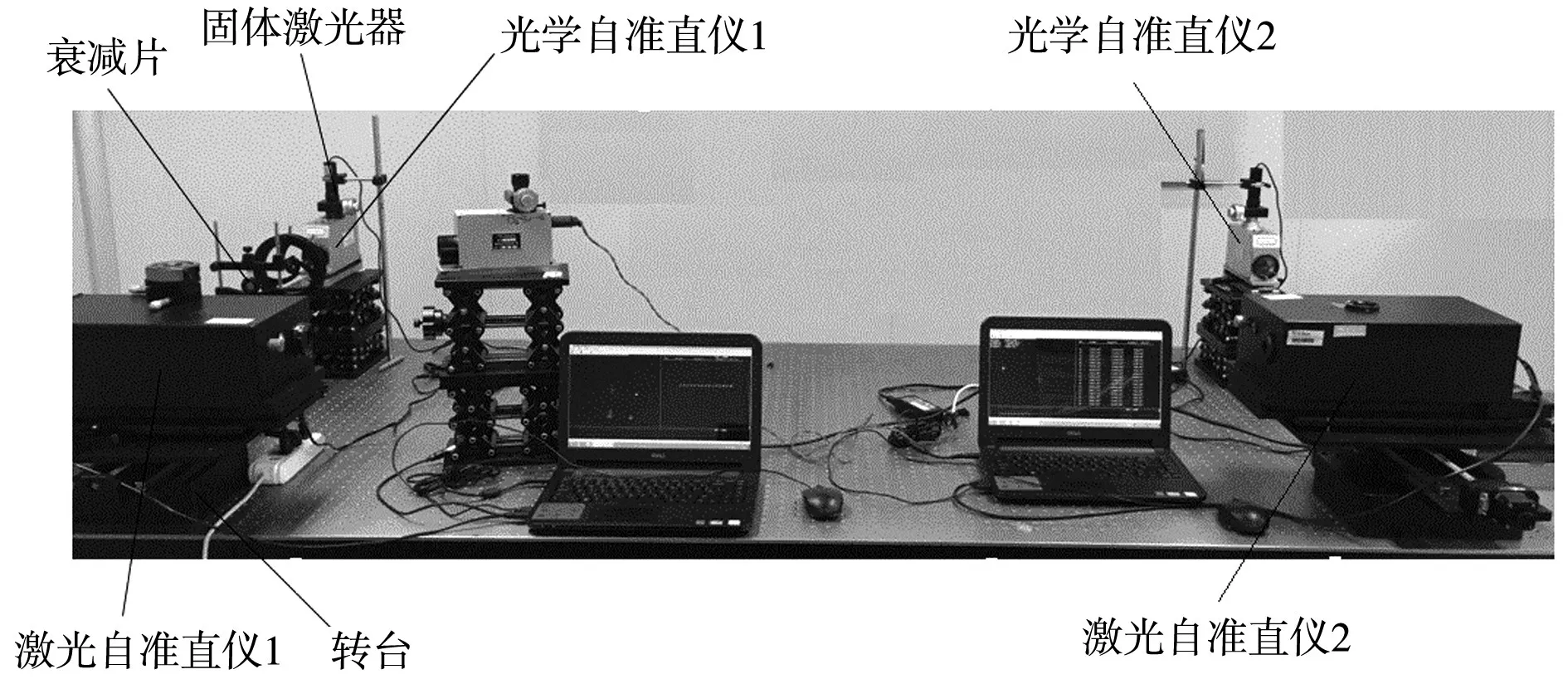
图3 测量系统原理模型
实验采用两个固体激光器和光学自准直仪模拟双光轴发射系统作为被测设备,两光学自准直仪相距2m,固体激光器通过支架与夹具分别固定在两光学自准直仪目镜处,固体激光器发出的光经光学自准直仪后形成带有一定方向的平行光作为出射光,实验将对两出射光的光轴平行度进行测量。
首先,将两激光自准直仪粗对准两束出射光,使激光自准直仪可以接收到出射光。由于固体激光器的能量较强,为防止激光自准直仪的接收器件发生过饱和现象,采用衰减片对待测出射光衰减,衰减后的光射入激光自准直仪1后经过内置自准直光路在接收器件上形成光斑,并在计算机上得到光斑图像,光斑图像如图4(a)所示,通过激光自准直仪1上的二维调整机构调整其水平和俯仰方向的位置,使两光斑中心重合,重合后的光斑图像如图4(b)所示,由图1所示测量原理可知,此时激光自准直仪1的发射系统光轴与左侧待测光的光轴平行;衰减后的光射入激光自准仪2后形成一个光斑,实验中以右侧待测光作为基准,因此激光自准直仪2无需调整位置使接收器件中心与待测光斑中心对准,只将待测光斑中心设为基准即可。

图4 光斑对准图
将激光自准直仪1顺时针旋转90°,激光自准直仪2逆时针旋转90°,完成左侧光轴以及右侧基准坐标的旋转。由于两个待测光的光轴不平行,在激光自准直仪转动90°后,激光自准直仪2可能接收不到激光自准直仪1发出的准直光束,通过激光自准直仪1下方的高精度直线位移导轨对其进行平移,使激光自准直仪2能够接收到准直光束,此时可在激光自准直仪2连接的计算机中得到两个光斑图像,根据两光斑的位置便可得到两光轴的空间角度。
实验所用转台精度有限(水平方向转动误差20″),不能满足测量精度要求,为了得到较高精度的测量结果,通过放置在激光自准直仪上的八面棱体与一个外置自准直仪对转台旋转角度进行测量,再通过运动控制器对转台的水平转动误差进行补偿,使角度精度可达到1.8″,保证水平方向测量结果的准确,由于激光自准直仪的测量角度可分解为X方向和Y方向的角度分量即水平方向和俯仰方向,因此可用水平方向的测量结果来代表整体的测量结果来验证方法的可行性。
2.2 实验数据及分析
将其他设备保持固定,转动光学自准直仪1用以模拟被测光轴的角度偏移,通过激光自准直仪1对光学自准直仪1的旋转角度进行测量,如此得到两发射系统出射光轴的角度增量,记为光轴旋转角度(激光自准直仪的精度为0.1″,是测量精度2″的1/20,因此可用激光自准直仪测得的数据作为约定真值),重复上述步骤对转动后的光轴角度值进行重新测量,得到新的测量结果,如此重复测量15次,得到15组数据。
测量数据如表1所示,对测得的数据做均值和均方根,得到的结果可知角度测量误差小于2″,实验及结果证明本文方法可行。

表1 水平方向测量数据

图5 测量数据对比图
从图5中可以看出,第三组、第五组、第七组和第九组数据误差较大,最大误差1.73″,影响实验测量精度的因素主要有以下两个方面:
光轴替代误差。由测量原理可知,光轴替代是测量方法中的重要步骤,激光自准直仪的CCD中心与接受到的光斑中心的重合精度对整个测量系统的测量结果有较大的影响,实验采用激光自准直仪上的二维调整机构实现光斑中心的对准,由于二维调整机构的精度有限,不能保证光斑中心是完全对准的,通过调整时的激光自准直仪读数可知,实验时的对准精度在0.5″以内。
光轴旋转误差。根据测量原理可知,光轴与基准坐标旋转90°的误差大小直接影响测量结果的精度,实验时采用了光学自准直仪、八面棱体和转台运动控制器对转台的转动误差进行测量和修正,但受限于运动控制器的最小步进角度,转台转动会有一定的误差,运动控制器最小步进角度1.8″。
根据以上分析,可以在接下来的研究中改进实验方案的措施有:在光斑对准时,使用高精度二维调整机构调整光斑位置,减小光斑中心对准误差;使用高精度转台降低光轴的旋转误差或使用更高精度的仪器对转台的旋转误差进行测量与校正,提高转台的旋转精度。
3 结论
本文提出了使用激光自准直仪对远距多光轴平行度进行测量的方法。通过激光自准直仪的准直光束替代发射系统的出射光轴,再通过两激光自准直仪互瞄,得到光轴平行性的测量结果。采用提出的方法进行了验证性实验,并对实验数据进行了相应的分析,实验结果表明:在保证转台轴系不晃动的前提下,该方法可测量出射光轴的空间夹角,测量精度可达到2″,且由于左右激光自准直仪完全分开独立,因此两激光自准直仪可根据待测设备的光轴间距进行调整以便进行测量,具有测量精度高、适用性广等优点。
[1]金旭阳,高云国,于萍,等.全天域激光发射光轴平行度检测方法研究[J].激光与红外,2015,45(2):176-180.
[2]张磊,崔启胤,张凯.适应大温差变化的多光轴一致性测试系统[J].长春理工大学学报:自然科学版,2017,40(4):10-13.
[3]肖作江,夏洋,朱海滨,等.光学瞄具三轴一致性检测系统研究[J].长春理工大学学报:自然科学版,2014,37(1):21-24.
[4]叶露,沈湘衡,刘则洵.强激光与红外光学系统光轴平行性检测方法的探讨[J].应用光学,2007,28(6):760-763.
[5]金伟其,王霞,张其扬,等.多光轴一致性检测技术进展及其分析[J].红外与激光工程,2010,39(3):526-531.
[6]杜娟,郑喆,王世锋,等.激光自准直仪小型化光机结构设计[J].长春理工大学学报:自然科学版,2015,38(6):1-4.
[7]黄银国.激光自准直微小角度测量基础技术研究[D].天津:天津大学,2010.
