星载激光通信端机形状记忆合金锁紧机构研究
2018-01-17张家齐王爱华邓宁
张家齐,王爱华,邓宁
(1.长春理工大学 空间光电技术国家地方联合工程研究中心,长春 130022;2.长春理工大学 机电工程学院,长春 130022;3.吉林铁道职业技术学院,吉林 132200;4.长春理工大学光电信息学院,长春 130114)
随着航天探测和通信等技术的不断发展,星载伺服转台应用逐渐增多,这种转台以二维转台为主,主要由两组精密轴系(方位轴和俯仰轴)和连接两组轴系的框架组成。为了提高发射时整个通信端机系统的模态和防止轴系转动,星载伺服转台方位轴和俯仰轴需要多个锁紧机构。目前伺服转台轴系的锁紧装置主要采用火工品,该类锁紧装置具有一定的缺陷:爆炸时火药粉末会污染光学系统、爆炸残骸会伤及周围的结构和设备;爆炸冲击大、燃气释放多;不能循环利用,只能一次性使用的元器件;因此急需开发非火工品锁紧装置来满足更严苛的航天使用要求[1,2]。
国外已有根据传统火工品思路,研制出形状记忆合金(Shape Memory Alloy,SMA)解锁机构,该锁紧机构在锁紧状态时通过销钉销紧分瓣螺母,使分瓣螺母形成螺纹副,解锁时记忆合金棒被加热,记忆合金棒伸长,产生的回复应力使销钉断裂,分瓣螺母分离,螺栓脱离,实现解锁。该锁紧结构机构具有承载大、低冲击、无污染等优点,但存在不能重复使用的问题[3]。
本文针对火工品锁紧装置爆炸冲击大、燃气释放多和国外常用记忆合金锁紧机构不可重复使用的问题,以星地激光通信项目为背景,以及星载激光通信的发射要求,提出了一种利用材料本身弹性变形特性的记忆合金锁紧机构,该锁紧机构结构简单、可提高系统的发射刚度、可靠性高、可重复利用。
1 锁紧机构设计
形状记忆合金锁紧机构,如图1所示,最大尺寸为60mm×25mm×25mm。

图1 解锁机构设计图
如图所示1是锁紧机构安装孔;2是锁紧体U型槽;3是加热丝线缆引出孔;4是锁紧体;5是TiNi记忆合金棒;6是固定记忆合金棒螺纹孔;7是加热丝;8是被锁紧体。
被锁紧体为星载激光通信端机,通信端机未工作时,锁紧装置中的加热丝未通电,通信端机通过锁紧体本身材料的弹性变形对转动体进行夹紧,实现锁紧体对被夹紧体的锁紧动作;
通信端机工作时,加热丝通电加热,TiNi记忆合金棒吸收热量,由于加热丝均匀的布置在记忆合金棒的内部,加热效率大大提升,当达到形变温度时TiNi记忆合金棒的长度发生延伸,产生的变形力作用在锁紧体上使夹紧块发生反向的弹性变形,卸掉对转动体的夹紧力,此时控制电机运动驱动转动体从锁紧装置中转出,实现锁紧机构释放动作。此结构提高了整个系统的刚度,且能够重复利用,原理简单,可靠性高。
2 驱动单元设计
这种形状记忆合金解锁机构,其核心是利用记忆合金形状记忆效应受热伸长和冷却时复位来实现机构的释放与锁紧过程,驱动单元的设计将直接关系到机构解锁功能的实现,其设计非常重要。
2.1 设计原理和方法
机构的驱动单元是由TiNi记忆合金棒记忆效应和锁紧体的弹性变形决定的,高温下记忆合金棒回复力抵消锁紧体的弹性变形力完成解锁,记忆合金棒冷却时,长度收缩,锁紧体用自身的弹性变形将被锁紧体锁紧,实现复位。
锁紧体的弹性变形力由记忆合金棒变形长度决定,回复力还要小于锁紧体材料的屈服极限,同时通过调整U型槽,保证锁紧体上下夹持力相等,设计流程如图2所示。

图2 设计方法流程图
图2中S为记忆合金棒的横截面积;Fr记忆合金棒的回复力;r锁紧体变形量;C为锁紧体U型槽的值;F1、F2锁紧体上下夹紧力;σs锁紧体材料屈服极限[4,5]。
2.2 锁紧体设计
(1)记忆合金棒材料的选取
具有形状记忆效应的合金已发现超过上百种,但当前应用最广的主要是TiNi基,Cu基以及Fe基三大类。TiNi合金是SMA合金系中记忆性能最好,应用最为广泛的一种材料,其综合性能优良,具有比强度高、耐蚀耐磨、疲劳寿命高等特点。
本文选用的高温TiNi合金作为锁紧装置的驱动机构,材料的性能如表1。
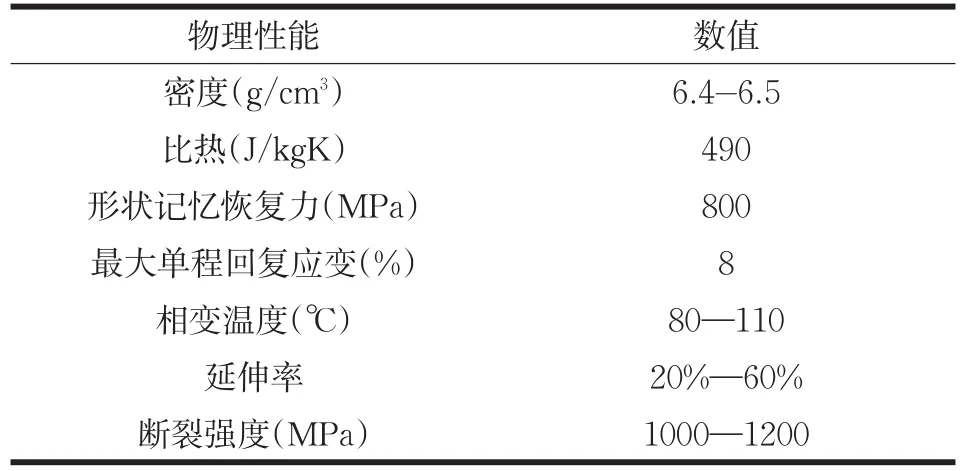
表1 TiNi记忆合金材料参数
(2)锁紧体设计
加热记忆合金棒加热伸长,使锁紧体发生弹性变形,试验表明TiNi记忆合金棒在80℃发生相变,伸长量为1mm。锁紧机构力学分析如图3所示,设计锁紧体上下夹紧槽的宽度为12.5mm,被夹紧体的宽度为13.5mm,通过公式(1)计算星载激光通信端机受到单支锁紧体夹持力。

图3 锁紧机构力学分析

式中,w是单侧锁紧体最大挠度;F1=F2是锁紧体克服弹性变形的力;X=a为受力点距离端点的距离;E为锁紧体弹性模量;I=Iy为锁紧体夹紧部分惯性矩;b、h锁紧体夹紧部分截面的宽度和高度;θB锁紧体夹紧部分端面的转角;S为TiNi记忆合金棒横截面积。

表2 锁紧体参数
把表 2的参数带入公式(1)-(3)求得F1为95516.7N,477.6MPa,TiNi记忆合金棒回复使锁紧体产生的变形力小于Ti-5Al-2.55n钛合金的屈服极限827MPa,当记忆合金棒冷却时,由于被锁紧体厚度大于锁紧体槽的厚度,锁紧体对被锁紧体施加一个弹性变形力F3,F3、F4的处的变形尺寸为0.5mm,带入数值算出锁紧体施加给星载激光通信端机的锁紧力F3=F4值为63677.8N。
3 锁紧后系统刚度特性分析
星载激光通信端机刚度特性主要受俯仰轴系、方位轴系和U型架三方面因素影响,合理的设计与布置方位轴和俯仰轴的锁紧机构也可提高星载通信端机的整体刚度。其中俯仰轴系和方位轴系中的轴承是微间隙单元,如何更为准确地分析含有间隙机构的动力学特性,对于结构设计与整机的力学适应性预测具有重要意义。
对间隙机构的分析国内外有很多文章,很多研究者是把轴承简化成为恒定的刚度的弹簧,通过公式(4)计算出轴承的刚度

式中,Z——轴承滚动体数目;Db——轴承滚动体直径;α——轴承接触角;Fa0——轴承预紧力。
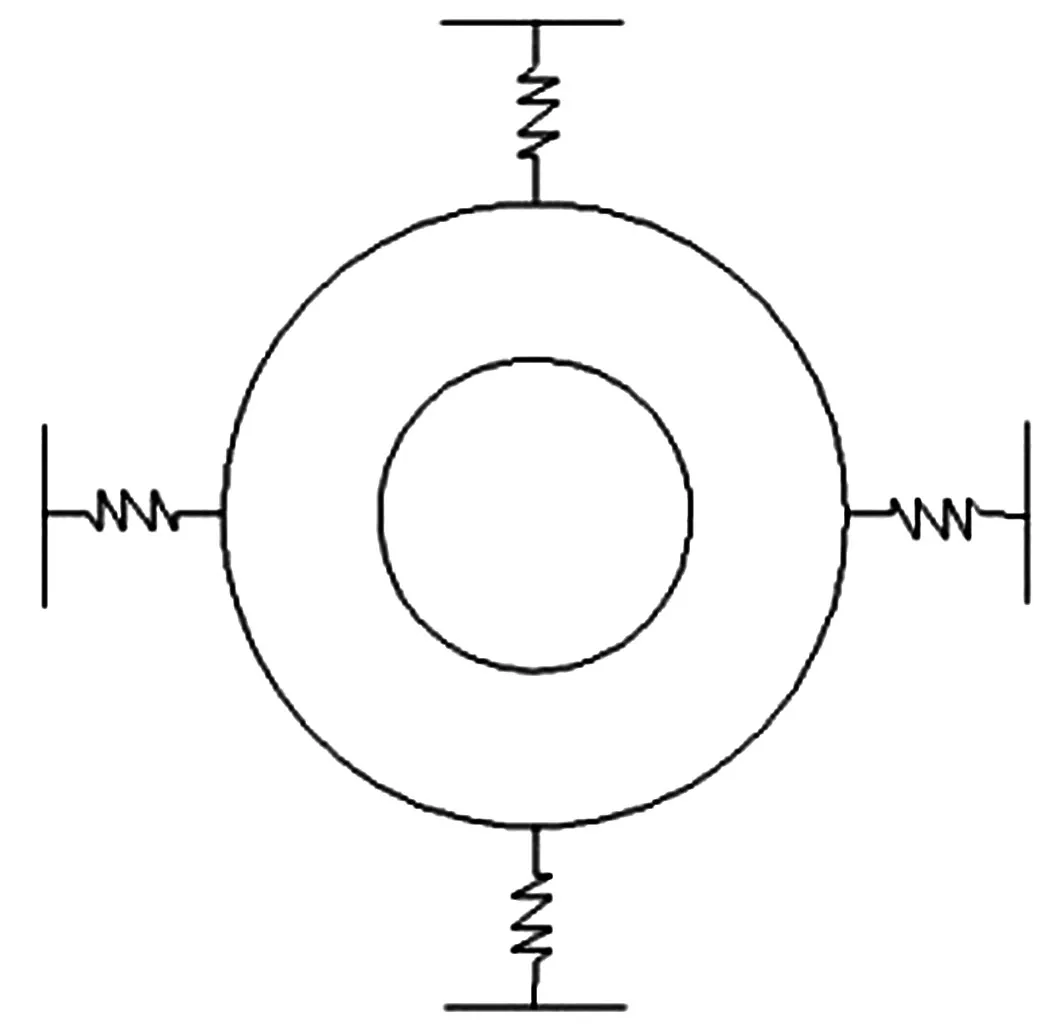
图4 轴承简化模型
如图4用均布在轴上的四根弹簧来模拟轴承[6],这种对轴承恒定刚度的假设忽略了轴承本身径向间隙,对于轴承的弹性接触问题和间隙问题,本文用有限元中的间隙单元概念来进行建模分析。
在研究接触问题之前,首先采用如下假设:
(1)接触材料的特性是线性的,位移和应变都很小;
(2)作用在接触面上的摩擦力满足库仑定理;
(3)接触表面是连续和光滑的。
有限元分析可以模拟出五种接触方式,分别是绑定接触、不分离接触、无摩擦接触、粗糙接触、摩擦接触,其中无摩擦、摩擦以及粗糙接触式非线性行为,需要多次迭代。但是仍然利用了小变形理论的假设。使用非线性接触类型,可以模拟间隙及更准确的接触状态。
间隙单元的平衡方程为:

整个结构的间隙单元平衡方程可表示为:

式中,[K]为物体1和物体2的刚度矩阵;{Q}为物体1和物体2(包含接触面)节点的位移向量;{}F为作用在节点上的外部载荷(包含间隙单元节点上的外力
在式(6)中,间隙单元的刚度矩阵根据几何边界条件设定:对于开式接触,即所有间隙单元的节点对位移满足,QiN-QjN<δ可通过增大间隙单元的弹性模量来减小2个接触体接触面之间的间隙;当QiN-QjN=δ,表明2个物体刚好处于接触状态,弹性模量不需要修改[7-8]。
激光通信端机方位轴和俯仰轴承内圈、外圈过盈配合,轴向和径向的载荷是通过内圈施加到钢球上,假设变形发生在轴承的钢球上,发生的变形为弹性变形,轴承座及轴为刚体,通过有限元法建立激光通信端机轴承的柔体到柔体基础模式力学模型。
锁紧机构锁紧处材料的弹性变形对激光通信端机进行锁紧,夹紧部分通过有限元法建立计算外力F3,F4外力作用下产生的摩擦接触的力学模型。
4 仿真分析
为了提升发射时整个系统的刚度和可靠性,方位轴系和俯仰轴系分别安装一组形状记忆合金锁紧机构,方位锁紧机构安装位置如图5所示,通过螺钉固定在激光通信端机的U型架的下方,俯仰锁紧机构安装位置如图6所示,分别固定在俯仰框架的中心对称的两侧。

图5 方位锁紧机构安装位置

图6 俯仰锁紧机构安装位置
此任务中激光通信端机应用在高轨卫星上,完成高轨对地激光通信演示实验,根据轨道和地面站分析,激光通信端机转动范围很小,方位轴和俯仰轴转动范围为±5°,当锁紧机构完成释放状态后,通信端机进入工作状态,两轴运动到指定工作范围内。避开锁紧机构,由于运动范围在±5°范围内不会与结构干涉。
对模型进行简化处理,减少无必要的运算,简化后的整体结构图如图7所示[9-11]。

图7 简化后的激光通信端机
根据上节的刚度分析,对端机各部分进行有限模型的建立,随后对星载激光通信端机非锁紧和锁紧时的模态进行分析,得到表3、图8和图9。

表3 激光通信端机的基频
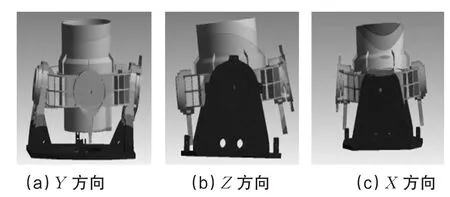
图8 未锁紧的激光通信端机三个方向基频振型

图9 锁紧后的激光通信端机三个方向基频振型
X方向是端机的发射方向。负载需在发射方向上基频大于70Hz才能满足平台的发射要求,在非锁紧状态下激光通信端机的模态为57.41Hz小于70Hz,锁紧状态下发射方向上基频为84.35Hz,满足激光通信端机的发射要求。
5 结论
根据星载激光通信端机的工作模式和发射要求,设计了一种基于材料本身弹性变形特性的形状记忆合金锁紧机构该锁紧机构结构简单、可靠性高,可重复利用。解决了火工品锁紧装置爆炸冲击大、燃气释放多和国外常用记忆合金锁紧机构脱离螺母回收和不可重复使用的问题。对锁紧机构进行了设计,并对星载激光通信端机进行了刚度分析,最后分析了在非锁紧和锁紧状态下星载激光通信端机的三阶模态,锁紧后的发射方向上模态为84.35Hz,证明该锁紧机构满足激光通信端机的使用要求。
[1]Peter A,Denoyer K,Fosness E,et al.Development and transition of low-shock spacecraft release devices[C].Aerospace Conference Proceedings.IEEE,2000,4:277-284.
[2]Yan X,Zhang K.Development of a small reusable space release device using SMA[J].Proceedings of SPIE—The International Society for Optical engineering,2007(6529):652905-1-652905-8.
[3]王玉琢.回转式形状记忆合金锁紧释放装置研制和实验[D].哈尔滨:哈尔滨工业大学,2013.
[4]张小勇,闫晓军,杨巧龙.形状记忆合金分瓣螺母空间解锁机构的设计与实验研究[J].机械工程学报,2010,46(17):145-150.
[5]闫晓军,张小勇,聂景旭,等.采用SMA驱动的小型空间磁悬浮飞轮锁紧机构[J].北京航天航空大学学报,2011,37(2):127-131.
[6]蔡力钢,马仕明,赵永胜,等.多约束状态下重载机械式主轴有限元建模及模态分析[J].机械工程学报,2012,48(3):165-173.
[7]李朝辉,王忠素,胡庆龙,等.月基极紫外相机跟踪转台设计与刚度分析[J].仪器仪表学报,2013,34(11):2535-2541.
[8]李朝辉,陈波.月基对地观测跟踪转台设计与分析[J].光子学报,2010,39(12):2215-2219.
[9]Mussett D,Humphries ME,Henzelin F,et al.Contraves Optical Terminal–coarse pointing assembly(CPA)[J].European Space Agency,Noordwijk,The Netherlands,2003(524):81-88.
[10]Baister G,Haupt C,Matthews S,et al.The ISLFE terminal development project- resultsfrom the engineering breadboard phase[C].Aiaa International Conmunication Satellito System Conference and Exhibit,2013.
[11]ToyodaM,ToyoshimaM,TakahashiT,etal.Ground to ETS-VI narrow laser beam transmission[J].SPIE Proc,2006(2699):71-80.
