深空环境下三星库仑编队重构控制研究*
2018-01-16吴立尧袁长清
吴立尧 袁长清
(空军航空大学飞行器与动力系,长春 130022)
引言
King等[1]在2002年首次提出卫星库仑力编队的概念,即通过使卫星带电(正电或负电)形成排斥力或吸引力,通过设计适当的控制律来控制卫星编队的构型、姿态、距离等以完成预期任务.从此库仑力卫星编队技术成为一种新兴的编队技术以其极大的优势引起了国内外学者的广泛研究.
由于三体及多体卫星编队存在卫星之间的耦合问题,这给控制过程带来了很多难题,国内外多为在地球同步轨道处的二体编队研究,三星库仑编队研究很有限.Berryman[2]提出一种解析求平衡电量的方法.针对两结点直线构形和三结点等边三角形构形的库仑虚拟结构,得到了紧凑形式的平衡电量解析表达式.Hussein等[3]于2007年首次研究库仑虚拟结构的反馈控制问题.考虑三结点共线虚拟结构,导出了共线三星自旋系统的稳定方程,应用线性化相对动力学方程设计了电荷反馈控制律,提高了系统共线虚拟系统的稳定性.Wang和Schaub[4]对在自由空间中受库仑力影响的带电固定三角形三卫星的位置控制进行了研究.不同于文中讨论的共线星体平衡电荷分布的配置方案,普通三角位形星体没有能达到平衡状态的电荷分布方案,即并不是所有三角形的三边长度都可以通过库仑力来进行控制的.Schaub和Hussein[5]针对三个航天器对称编队构形,应用线性控制理论,设计了反馈控制律,并讨论闭环系统稳定性.Hogan和Schaub[6]研究了三星库仑共线编队在库仑力的控制下的固定形状条件解.但是这些文献都没有考虑外界环境对于编队的干扰影响和德拜效应对于编队内部库仑力的影响.国内在三体卫星编队问题研究刚处于起步阶段,多为二体卫星研究.张皓和师鹏[7]在两星问题结论的基础上,通过对开环控制和闭环控制的仿真分析,给出了利用库仑力技术实现悬停轨道的实施方案.黄静[8]研究了二星编队在地月L2点附近的旋转二体库仑卫星的相对运动控制问题.另外黄静[9]针对于平动点附近处二体绳系系统姿轨耦合控制问题,首先采用欧拉-拉格朗日方程对二体卫星建模,设计了非线性二次型最优控制器实现了对二体绳系系统的长周期稳定控制.王婷和张羽飞[10]分析了立体五星编队在静电力和万有引力作用下的静态构型,并采用线性二次型最优控制方法保持编队的静态构型稳定并实现了编队飞行控制仿真.在控制器的选择上,上述文献多为简单的反馈控制,对于存在外界干扰的不确定项,常规的反馈控制系数难以整定,基于BP神经网络的PID控制[11]在控制效果与稳定性上都优于传统反馈控制器.
针对于上述研究的不足,本文选取地月平动点L2处作为问题背景,考虑外界环境干扰作用和德拜效应对库仑编队的影响,推导出深空环境下较精确的三星库仑编队的动力学模型,并设计了基于BP神经网络的PID控制方法,在不确定干扰的情况下通过BP神经网络自主学习功能获取相对最优的PID控制参数,从工程角度简化结构和算法.仿真证明提出的控制方法简单有效,控制性能明显优于传统PID控制,大大提高了系统对于外界干扰的鲁棒性.
1 三星库仑编队动力学模型
本节研究三星库仑编队系统,如图1所示为空间中三体卫星系统结构图,并将卫星视为质点.其中m1、m2、m3分别为卫星的质量,q1、q2、q3分别为卫星所带电量,r1、r2、r3为卫星在惯性坐标系中位置矢量,r12、r23、r13分别为卫星之间相对位置矢量.αi为卫星位置矢量间夹角.

图1 三体卫星系统结构图Fig. 1 Structure of three-body satellite system
特例:当三体卫星编队系统质心作为惯性坐标系的原点,三颗卫星在库仑力的作用下处于三星共线平衡状态,共线结构绕质心O做圆周运动,如下图2所示.

图2 共线平衡结构Fig. 2 Collinear equilibrium structure
在深空环境中,由于卫星间库仑力与天体引力数量级相差很大,所以忽略天体引力作用[4];而德拜长度大致为20~50m,与卫星编队相对距离相差不大,所以德拜长度不能忽略.三星库仑编队的动力学方程如下:
(1)


(2)

由式(1)可得到三颗卫星间相对动力学方程:
(3)

对于三颗卫星共线构型特例,由图(1)和图(2)可得α1=0°,α2=180°,α3=0°.式(3)可表达为:
(4)
2 控制器设计
PID控制器具有结构简单、稳定性和鲁棒性好的优点;BP神经网络具有超强的自主学习和非线性逼近干扰能力,学习结构简单明确.为获取好的控制效果,选取最优的PID控制反馈增益Kp、Ki和Kd可以通过神经网络对系统性能的学习来实现最佳组合的PID控制.采用基于BP神经网络的PID自适应控制,可以建立参数Kp、Ki和Kd自学习的神经PID控制,从而达到参数自行调整最优的目的.
2.1 PID控制
首先定义状态向量X为:

(5)


(6)
式中,ξ为控制向量,A为3×3矩阵,如下式:
(7)
令X=X*+δX,其中δX为卫星间相对距离误差向量.根据式(6),设计PID反馈控制律如下:
(8)
式中‖A‖=0,矩阵A为奇异不可逆矩阵.
2.2 基于BP神经网络PID控制
神经网络是模仿生物神经网络功能的一种经验模型,由若干简单元件及其层次组织,以大规模并行连接方式构造而成的网络而成的网络.由于神经网络中神经元间复杂的连接关系和各神经元传递信号的非线性方式,输入和输出信号间可构造出各种关系,因此可表达用机理模型无法精确描述,但输入和输出之间确实有客观的、确定性或模糊性规律.本文根据库仑编队动力学特性和外界环境干扰因素调节PID控制参数,以达到性能指标最优化,使输出层的输出状态对应PID三个可调控制参数,通过神经网络自主学习、加权系数调整,获得最优的参数组合.
该控制算法步骤如下:

(2)采样得到rin(k)和yout(k),计算该时刻误差error(k)=rin(k)-yout(k).
(3)计算神经网络各层神经元的输入、输出,输出层即为PID控制器的三个可调参数Kp、Ki和Kd.
(4)根据经典增量数字PID的控制算法计算控制器的输出u(k):
u(k)=u(k-1)-Kp(error(k)-error(k-1))+
Ki(error(k))+Kd(error(k)-
2error(k-1)+error(k-2))
(9)
(6)置k=k+1,返回到(1).
由于控制变量ξ是为两颗卫星电荷乘积与间隔距离的函数,由式(2)可得两卫星电荷乘积Q与控制变量ξ和状态变量X的关系式为:
Q=Qref+δQ
(10)
KpδX)
(11)
其中Qref为给定任务所对应的参考电荷乘积.单颗卫星所带电荷如下式为:
(12)
3 仿真校验
本节考虑在深空环境中三星库仑共线编队飞行问题,利用Matlab/Simulink仿真软件对共线编队控制问题进行数值仿真,检验控制算法的合理性与有效性.仿真过程中,将本文提出的BP神经网络PID控制与传统PID控制进行了比较.

w_i=0.5×rand(H,IN)
w_o=0.5×rand(Out,H)
利用Matlab/Simulink进行数值仿真,仿真结果如下图所示.

图3 0~4h内三颗卫星的运行轨迹(BP-PID控制)Fig. 3 Motion trajectory of three crafts in 4 hours under BP-PID control

图4 4h后三颗卫星的运行轨迹(BP-PID)Fig. 4 Motion trajectory of three crafts after 4 hours under BP-PID control
如图3和4所示,分别为在BP神经网络PID控制下4h内三星库仑编队重构过程和4h后三星库仑编队共线稳定过程.三颗卫星分别从初始位置进行不规则的曲线运动到相对距离不变的共线圆周运动,实现了位置改变并保持的构型重构控制.如图5所示为在传统PID控制和BP神经网络PID控制下三颗卫星之间相对距离随时间的变化曲线图,由图可以看出采用两种控制器均能够使三星库仑编队按预期要求达到期望状态,在0~4h内相对距离由初始距离渐进趋向于稳定的理想距离,并时刻保持三星共线平衡状态.但是在两种控制策略下,BP神经网络PID控制在控制稳定性和调节时间方面都优于传统PID控制,如图6所示,分别为任意两颗卫星在传统PID控制和BP神经网络PID控制下电荷乘积随时间的变化情况,在编队重构过程中电荷乘积由初始值逐渐趋于稳定电荷积,以提供三星编队旋转的向心力和克服太阳光压干扰.由图5~6可以明显看出,基于BP神经网络的PID控制调节时间短、能够较快地恢复稳定,超调量近似0%,控制性能明显优于传统PID控制.
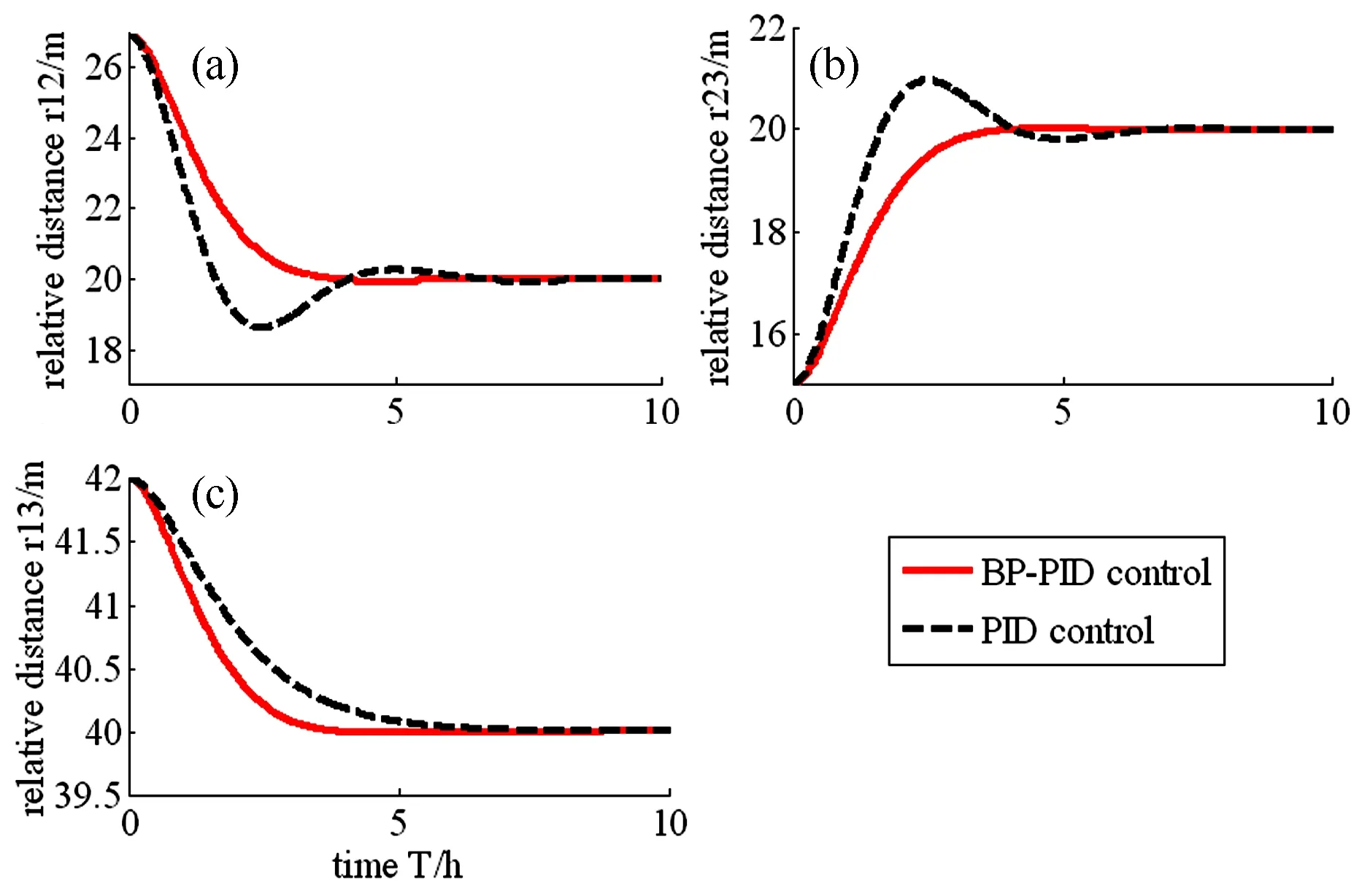
图5 传统PID控制和BP神经网络PID控制下卫星间相对距离随时间的变化曲线Fig.5 Time history of relative distance between PID control and BP-PID control

图6 传统PID控制和BP神经网络PID控制下卫星间电荷乘积随时间的变化曲线Fig. 6 Time history of charge product for satellites under PID control and BP-PID control
4 总结
本文研究了深空环境下(地月平动点L2点)三星库仑编队构型重构控制问题,设计了基于BP神经网络的PID控制器.首先考虑外界环境干扰作用(主要为太阳光压)和德拜效应影响,推导出较精确的三星库仑编队的动力学方程,设计基于BP神经网络的PID控制器,将PID控制与BP神经网络控制相结合,利用神经网络自主学习功能逼近非线性扰动项来获得相对较优的PID控制参数,通过控制器改变卫星所带电荷进而改变卫星之间库仑力大小,使编队渐近稳定并按理想间距和构型飞行.利用Matlab软件对三星编队轨迹以及控制电荷的变化情况进行了仿真,结果显示基于BP神经网络的PID控制效果理想,其动态过程中超调量及调节时间均比传统PID控制小,具有良好的鲁棒性、自适应性和容错性.从工程角度上简化控制器结构和算法,减少了卫星上机载计算机工作量,具有一定的推广应用价值.
1King L B, Parker G G, Deshmukh S, et al. Spacecraft formation flying using inter-vehicle Coulomb force. Tech. Rep. NASA/NIAC, 2002
2Hussein I I, Schaub H. Stability and control of relative equilibrium for the three-spacecraft coulomb tether problem. AAS/AIAA Astrodynamics Specialists Conference, Mackinac Island, MI, Aug. 19-23 2007, Paper No. AAS 07-269
3Hussein I I, Schaub H. Stability and control of relative equilibrium for the three-spacecraft coulomb tether problem.ActaAstronautica, 2009:738~754
4Wang S, Schaub H. Switched lyapunov function based coulomb control of a triangular 3-vehicle cluster.AdvancesintheAstronauticalSciences, 2009,135:1477~1496
5Hogan E, Schaub H. Linear stability and shape analysis of spinning three-craft coulomb formations. AAS Spaceflight Mechanics Meeting, New Orleans, Louisiana, February 13-17, 2011, Paper No. AAS 11-225
6Erik A. Hogan, Schaub H. Collinear invariant shapes for three-craft coulomb formations.ActaAstronautica, 2012,72:78~89
7张皓,师鹏,李保军等. 利用库仑力实现悬停轨道的新方法研究. 宇航学报, 2011,33(1):68~75 (Zhang H, Shi P, Li B J, et al. Hover orbit using inter-spacecraft coulomb forces.JournalofAstronautics, 2011,33(1):68~75 (in Chinese))
8黄静,李传江,马广富等. 考虑状态约束的二体旋转库仑卫星系统重构控制. 宇航学报, 2015,36(5):557~565 (Huang J, Li C J, Ma G F, et al. Control for reconfiguration of a spinning two-body coulomb satellite system with state constrains.JournalofAstronautics, 2015,36(5):557~565 (in Chinese))
9Huang J, Ma G F. Nonlinear dynamics and reconfiguration control of two-satellite coulomb tether formation at libration points.AerospaceScienceandTechnology, 2014,39:501~512
10 王婷,张羽飞. 等质量立体五星库仑编队飞行的分析与控制. 宇航学报, 2015,36(11):1279~1288 (Wang T, Zhang Y F. Analysis and control for three dimensional five-satellite coulomb formation flight in geostationary earth orbit.JournalofAstronautics, 2015,36(11):1279~1288 (in Chinese))
11 Zhang X L,Fan H M. Nonlinear control of triple inverted pendulum based on GA-PIDNN.NonlinearDynamics, 2015,79(2):1185~1194
