基于ibeacon的室内二阶段定位算法研究
2018-01-09刘增里李云昊
张 莲,刘增里,李云昊,陈 玲
(1.重庆理工大学 电气与电子工程学院, 重庆 400054;2.中国兵器工业第203研究所, 西安 710065)
基于ibeacon的室内二阶段定位算法研究
张 莲1,刘增里1,李云昊1,陈 玲2
(1.重庆理工大学 电气与电子工程学院, 重庆 400054;2.中国兵器工业第203研究所, 西安 710065)
针对室内定位需求的日益增加,提出了一种基于ibeacon的室内二阶段定位算法。在建立传输模型时,采用高斯滤波与中值滤波相结合对RSSI值进行优化处理;在坐标定位时分成2阶段:第1阶段通过极大似然法对未知点坐标进行粗略估计,缩小定位范围;第2阶段先对三角质心算法的加权因子进行改进,再采用改进的加权三角质心定位算法对未知点坐标进行精细定位。实验结果表明:在实验室环境下算法的定位精度可达1.22 m,对比一般的加权三角质心算法在定位的精度和稳定性方面都有了较好的提升,平均误差减少了30%左右。
ibeacon;二阶段定位;RSSI;极大似然法;加权三角质心算法
近年来随着移动互联网的发展,基于位置服务在各行业中展现出了广阔的应用前景。GPS在室外定位中得到了广泛应用,但由于室内环境复杂、GPS信号衰减严重,无法实现较为精确的室内定位,而在实际生活中,人们80%的活动时间和空间在室内,人们对于室内定位技术的需求也在不断增加[1]。目前,应用于室内定位的技术主要有低功耗蓝牙、WIFI、超声波、Zigbee等[2]。2013年9月,苹果公司发布了基于蓝牙4.0的ibeacon技术,该技术凭借其低功耗、低成本、容易实现等特点,成为了目前室内定位研究的热点[3]。文献[4]提出了基于ibeacon的加权三环定位算法,定位精度一般;文献[5]提出了ibeacon的改进型环形定位算法,在定位精度上有了提高,但是前期未对数据进行处理,定位误差偏大;文献[1]提出了基于ibeacon的三角质心定位方法,并在前期对数据加入了阶段去噪与平滑滤波,定位精度和误差都得到了一定的改善。本文提出了一种基于ibeacon的二阶段定位算法:采用极大似然估计与加权三角质心相结合的方法,并在前期加入去噪和平滑滤波,进一步提高了定位精度和稳定性,减少了定位误差。
1 RSSI测距原理
本文采用基于接收信号强度RSSI值的测距方法[6],通过蓝牙终端接收到ibeacon节点发送的RSSI值,再根据无线信号在室内空间中的传播模型,最终计算出蓝牙终端到ibeacon节点的距离。无线信号的传输模型选择常用的Shadowing模型(即对数距离衰减模型),可以分为路径衰减和噪声干扰两部分,表示为:
PL(d)=PL(d0)+10nlg(d/d0)+X0
(1)
其中:PL(d)和PL(d0)分别表示蓝牙终端距离ibeacon节点d和d0处的RSSI值,单位为dBm;d0为参考距离,一般取1 m;n为无线信号衰减因子;X0是遮蔽因子,它是一个均值为零的高斯随机变量。在蓝牙终端距离ibeacon节点1 m处,测得的RSSI值为A=PL(d0=1),而X0均值为0,所以Shadowing模型可以简化为
RSSI=A-10nlg(d)
(2)
其中,参数A和n由环境决定。当环境一定时,可以通过大量实验数据拟合得到A和n的值,由此得到无线信号在当前环境的传输模型,进而通过蓝牙终端接收到的RSSI值反向求取终端到 ibeacon节点的距离。
2 极大似然估计
极大似然法是利用已知参考节点到未知点的距离作为信息来估计未知节点的坐标[6],原理如图1所示。

图1 极大似然法原理
已知n个ibeacon节点的坐标为(x1,y1)、(x2,y2)、(x3,y3)、…、(xn,yn),未知点O(x,y)(蓝牙终端)到n个ibeacon节点的距离分别为d1、d2、d3、…、dn,则可以列出n个坐标与距离的方程组:
(3)
将式(3)中的前n-1个方程分别减去第n个方程,可以得到方程组:
(4)
令
(5)
则方程组(4)可以表示为
AX=b
(6)
当n≥3时,根据最小二乘法可得到方程组(6)的最小二乘解,为
(7)
3 加权三角质心算法
在实际环境中,由于噪声干扰、信号衰减严重等情况的发生,一般会使接收到的RSSI值小于实际值,导致换算出来的距离值大于实际值,使得3个圆不会交于一点[7]。实际模型如图2所示,以O1、O2、O3为圆心的3个圆两两相交于3个点A(xA,yA)、B(xB,yB)和C(xC,yC),以A、B、C这3点为顶点的三角形的质心即为未知点。通过对无线信号传输模型的分析可以发现,一般的质心算法并没有反映出不同ibeacon节点对待测点影响力的大小,影响了定位精度。为了减小误差,采用加权三角质心定位算法,将不同的ibeacon节点与质心坐标间的内在联系通过权值体现出来[8]。针对图2采用加权三角质心算法,在加入距离倒数的加权因子后,未知点坐标的计算公式为:
(8)
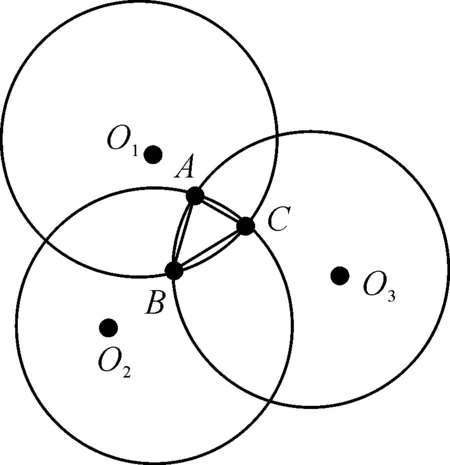
图2 实际的三角质心定位模型
4 二阶段定位算法
本文定位算法分为2个阶段:第1阶段先采用极大似然法对未知点进行粗略估计,为了减少算法的复杂程度,提高定位的效率,本算法只求取3个最小二乘解,得到3个粗略估计的坐标点;第2阶段用改进的加权三角质心算法对3个粗略估计点进行精细定位,进一步提高定位精度。
4.1 第1阶段粗略估计

(9)
(10)
(11)
根据式(7),可以得到上述3个方程组的解,分别为
(12)
4.2 权值改进
许多文献选取的权值都与距离的倒数有关,距离的倒数可以体现ibeacon节点对未知节点的不同影响。考虑到距离值是由测量的RSSI值经过测距模型求得,因此未知节点接收到的来自ibeacon节点的RSSI值也会对坐标定位带来一定的影响,而且距离越远对应的RSSI值越小,RSSI值越大时对应的距离越近。本文算法对加权三角质心算法的权值进行改进,将未知节点接收的RSSI值与距离值的倒数一同考虑进来,将未知节点接收到ibeacon节点的RSSI值与对应距离的比值作为权值。
4.3 第2阶段精细定位
前面由极大似然估计得到了3个点Z1、Z2、Z3,现对这3个点再采用改进的加权三角质心算法,就能够对未知点O进行精细定位。而Z1、Z2、Z3点的坐标与集合RSSI1、RSSI2、RSSIn和D1、D2、D3有关系,本文将集合RSSI1、RSSI2、RSSIn和D1、D2、D3中对应元素比值之和的平均值作为加权因子ω1、ω2、ω3,反映出Z1、Z2、Z33个点对质心坐标的不同影响力,进一步提高定位精度,减小误差。加权因子表示为:
(13)
则未知点O(x,y)通过改进的加权三角质心算法后的坐标可以表示为:
(14)
5 实验与结果分析
5.1 实验设计与布置
本次室内定位实验在12 m×8 m的实验室环境下进行,实验室有桌子、椅子以及其他实验用品,实验环境较复杂。ibeacon节点平面布置如图3所示,本次实验共布置20个ibeacon节点,节点按照均匀对称方式安装,相邻ibeacon节点间相隔2 m,ibeacon节点安装在离地面1.2 m的平面上。按照图3中所给坐标系建立实际的平面坐标,20个ibeacon节点的平面坐标如表1所示。
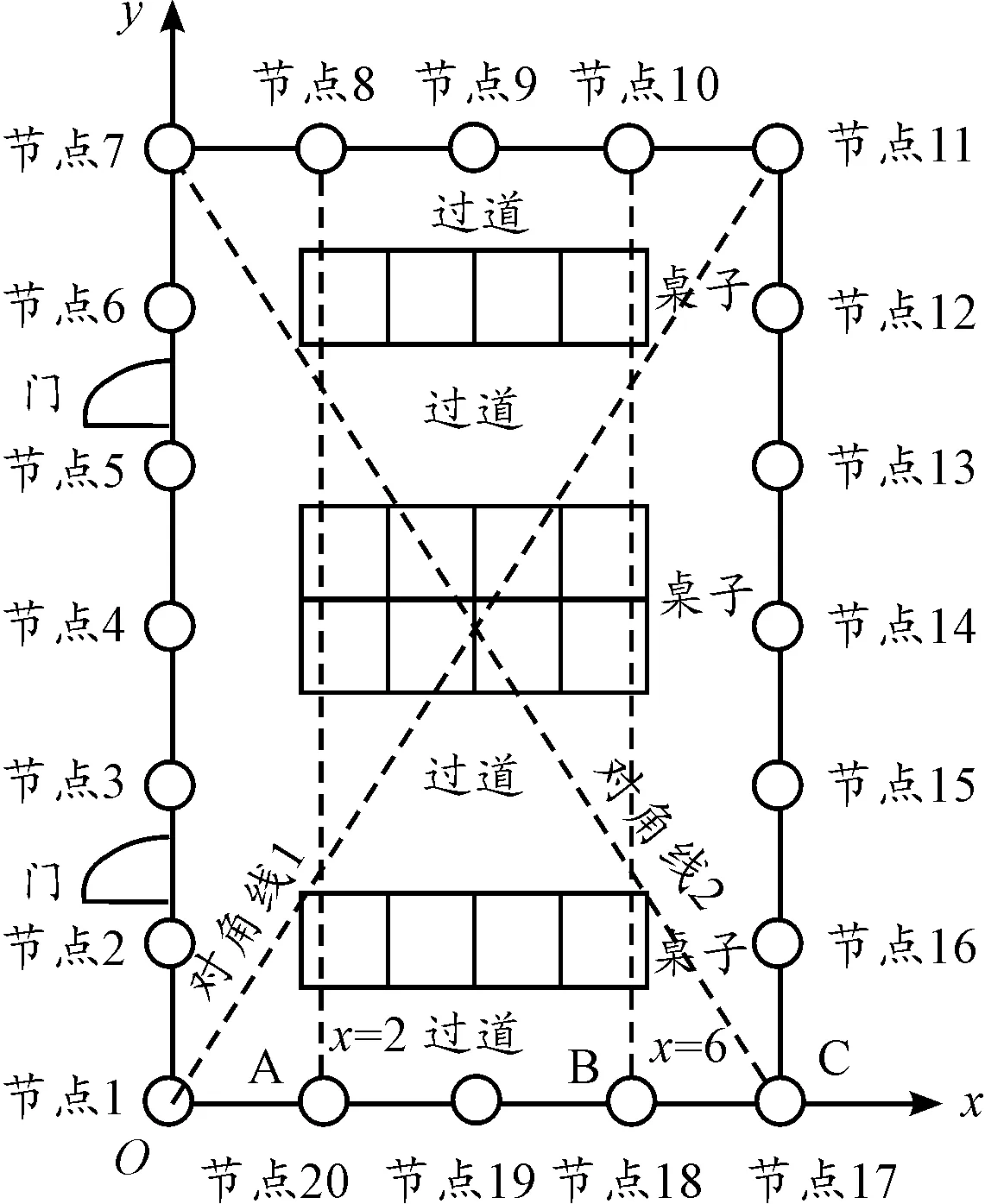
图3 实验平面布置图

节点坐标节点坐标节点1(0,0)节点11(8,12)节点2(0,2)节点12(8,10)节点3(0,4)节点13(8,8)节点4(0,6)节点14(8,6)节点5(0,8)节点15(8,4)节点6(0,10)节点16(8,2)节点7(0,12)节点17(8,0)节点8(2,12)节点18(6,0)节点9(4,12)节点19(4,0)节点10(6,12)节点20(2,0)
5.2 确定传输模型
在安装ibeacon节点前先对其进行配置,包括名称、发射功率、发射周期等信息,配置完成后打开蓝牙终端对ibeacon节点进行测试。本次测试使用带有蓝牙4.0的Android手机,图4所示为接收到的ibeacon节点广播的信息。为了更准确地求取信号传输模型,如图3所示,在距离地面1.2 m处的O点、A点、B点和C点分别安装1个ibeacon节点,然后分别在x=2、x=6、对角线1和对角线2四个方向上每间隔0.5 m取点采样,每个方向选取24个点作为样本点,每个点采样20个RSSI值作为样本值。将20个样本值进行高斯-中值滤波优化处理,图5为滤波的效果。

图4 ibeacon节点测试图

图5 滤波效果
采样完成后,将20个ibeacon节点按图3安装好。将采样数据按x=2、x=6、对角线1和对角线2的顺序分为4组,分别进行滤波平滑处理后计算每个样本点的平均值。将平均值作为该点样本值的最终值,由此得到4组样本点的平均值如图6所示。

图6 采样点平均值统计
应用Matalab的拟合工具箱cftool先将这3组数据进行smooth处理,再按信号传输的shadowing简化模型公式进行自定义曲线拟合,拟合结果如图7所示。

图7 曲线拟合
通过拟合得到4个传输模型,见式(15)。
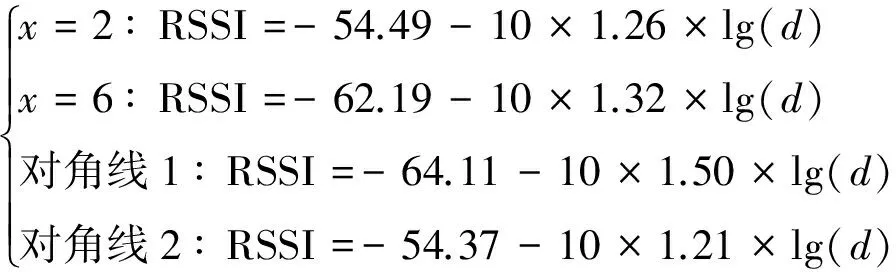
(15)
于是分别得到4组A和n的值:
(16)

RSSI=-58.87-13.2lg(d)
(17)
5.3 定位实验与结果分析
在实验室选取40个坐标已知的点进行实验,分别在这40个点用手机终端接收20个ibeacon节点广播的RSSI值,将RSSI值通过本文的算法求解,得出对该点坐标的估计值;再选择RSSI值由大到小且其坐标不在同一直线上的3个ibeacon节点,用一般的基于距离倒数因子的加权三角质心定位算法分别对40个点进行估计。定位结果对比见图8,误差对比见图9,可以看出本文算法相比一般的加权三角质心算法,定位精度有了提高,平均误差减少了30%左右。

图8 定位结果对比

图9 定位误差对比
6 结束语
本文提出了一种基于ibeacon的室内二阶段定位算法,考虑到无线信号在室内传播过程中容易受到衰减、反射、多路径传播等因素的影响,先对采样数据进行去噪平滑处理,保证了计算信号实际传输模型的可靠性。在定位阶段先采用极大似然估计对未知点进行粗略估计,缩小定位范围,再通过改进的加权三角质心定位算法进行精细定位。本算法在计算过程增加不多的情况下提高了定位精度,体现了其优越性。实验结果表明:本算法的定位精度提高到1.22 m,平均误差减少到0.6 m,能满足大多数的室内定位需求。
[1] 马旭攀,惠飞,景首才,等.一种基于蓝牙信标的室内定位系统[J].测控技术,2016(4):55-58,66.
[2] 冯星明,倪冰.主流室内定位技术应用研究[J].现代建筑电气,2017(2):21-25.
[3] 张倬胜,马方方,薛静远,等.基于iBeacon的精细室内定位方法研究[J].地理信息世界,2015(2):26-30.
[4] 石志京,徐铁峰,刘太君,等.基于iBeacon基站的室内定位技术研究[J].移动通信,2015(7):88-91.
[5] 刘明伟,刘太君,叶焱,等.基于低功耗蓝牙技术的室内定位应用研究[J].无线通信技术,2015(3):19-23.
[6] 韩江洪,祝满拳,马学森,等.基于RSSI的极大似然与加权质心混合定位算法[J].电子测量与仪器学报,2013(10):937-943.
[7] 陆杨洁,刘志勤,杨雷,等.基于接收功率电平的三角质心近距离定位算法[J].传感器与微系统,2016(3):137-139,143.
[8] 杨博雄,倪玉华,刘琨,等.基于加权三角质心RSSI算法的ZigBee室内无线定位技术研究[J].传感器世界,2012(11):31-35.
ResearchonIndoorTwoStageLocalizationAlgorithmBasedonIbeacon
ZHANG Lian1, LIU Zengli1, LI Yunhao1, CHEN Ling2
(1.School of Electrical and Electronic Engineering, Chongqing University of Technology, Chongqing 400054, China; 2.The 203rdResearch Institute of China Ordnance Industry, Xi’an 710065, China)
In view of the increasing demand for indoor location, an indoor two-stage localization algorithm based on ibeacon is proposed. When building the transmission model, the RSSI value is optimized by the combination of Gauss filter and median filter; When positioning is divided into two stages, to narrow the scope of location, and has a rough estimate of the unknown point coordinates of the first stage by the maximum likelihood method; In the second stage, the weighting factors of the triangle centroid algorithm are improved firstly, and then the improved weighted triangle centroid location algorithm is used to fine coordinate the unknown points. The experimental results show the accuracy of the proposed algorithm can reach 1.22 m in the laboratory environment, the positioning accuracy and stability are better than the general weighted triangle centroid algorithm, and the average error is reduced by about 30% compared with the general weighted triangle centroid algorithm.
ibeacon; two stage localization; RSSI; maximum likelihood; weighted triangle centroid algorithm
2017-07-11
张莲(1967—),女,重庆人,教授,硕士生导师,主要从事远程测试与控制技术、信号处理等方面的研究,E-mail:zh_lian@cqut.edu.cn。
张莲,刘增里,李云昊,等.基于ibeacon的室内二阶段定位算法研究[J].重庆理工大学学报(自然科学),2017(12):166-172.
formatZHANG Lian, LIU Zengli, LI Yunhao, et al.Research on Indoor Two Stage Localization Algorithm Based on Ibeacon[J].Journal of Chongqing University of Technology(Natural Science),2017(12):166-172.
10.3969/j.issn.1674-8425(z).2017.12.029
TN99
A
1674-8425(2017)12-0166-07
(责任编辑杨黎丽)
