流速对自升式平台动力放大因子的影响研究
2018-01-09马网扣袁飞晖
马网扣, 袁飞晖
(1.中国船舶及海洋工程设计研究院,上海 200011;2.上海外高桥造船有限公司,上海 200137)
流速对自升式平台动力放大因子的影响研究
马网扣1, 袁飞晖2
(1.中国船舶及海洋工程设计研究院,上海 200011;2.上海外高桥造船有限公司,上海 200137)
研究自升式平台动力放大因子的随机波动态响应分析法,以某自升式钻井平台为例进行动力放大因子分析,结果显示流速越大,流对平台动态和静态运动响应的抑制越显著,平台动力放大因子随着流速增大而减小。进一步进行算例平台的惯性力分析,结果显示随机波动态响应分析法能够考虑流速的影响,该方法得到的惯性力增大相对平缓。研究表明,流速较大时使用随机波动态响应分析法确定自升式平台的动力放大因子和惯性力,能优化桩腿设计,避免无谓的结构加强,有利于增大平台的可变载荷设计指标。
动力放大因子;随机波动态响应分析法;流速;惯性力
0 引 言
自升式平台的作业特点要求其能在站立状态下抵抗一定的风暴。风暴载荷是计算校核自升式平台的桩腿强度、倾覆稳性和滑移稳性的关键参数。风暴载荷组成中波浪激振作用引起的结构惯性力不可忽略,而惯性力大小主要取决于平台的动力放大因子(DAF)。随着作业水深的加大,自升式平台的惯性力在整体载荷中的比重也越来越大。自升式平台的动力放大因子可理解为波激作用下平台的动力响应极值与静态响应极值之比,是反映平台结构动力放大效应的参数。目前业界对自升式平台动力放大因子的研究主要集中在平台动态响应极值计算、波浪载荷线性化、结构模型简化、桩基对动力放大因子的影响等几个方面[1—4]。Zhang等[5]通过对两个自升式平台的动态响应极值和动力放大因子算例进行比较,讨论了4种常用的动力放大因子的动态响应分析法之间的差异,并研究了生成随机波的随机种子对动力放大因子计算结果的敏感性。黄盟宇等[6]通过Stokes五阶波方法计算了某自升式平台的静态和动态基础剪切力,讨论了单自由度法计算动力放大因子的适用性,还比较了桩腿与船体采用齿轮齿条连接和锁紧机构连接间平台动力放大因子的差异,指出增加平台刚度能对其动力放大因子起到一定的抑制作用。Saeidtehrani等[7]选择波斯湾典型海底土质,比较了5种不同的桩基条件对自升式平台动力放大因子的影响。Perry等[8]研究指出当使用拖曳/惯性参数法计算自升式平台动力放大因子时,应将结果乘以一个与周期比有关的放大系数,以免在平台固有周期与波浪激励周期接近时低估其动力放大因子。
风暴自存工况是自升式平台的关键控制工况之一,而风暴气象下,高速流往往与狂风巨浪同时出现。比如南海东部,热带气旋作用下的海水表层流速最高可达2.5m/s以上[9]。对自升式平台来说,当使用莫里森公式求解波流联合作用下的载荷时,需要将海流速度矢量与波浪水质点速度矢量叠加,而波流载荷中的拖曳力部分与速度平方成正比,因而流的影响不可忽略。目前关于流速,特别是高流速时波流联合对自升式平台动力放大因子影响的研究和文献资料不多。本文以笔者参与设计的某400英尺(1英尺≈30.48cm)自升式钻井平台作为算例平台,研究能够考虑流速影响的动力放大因子随机动态响应分析法,分析流速对动力放大因子以及惯性力的影响。
1 自升式平台动力放大因子分析方法
自升式平台动力放大因子的分析方法主要有单自由度法(SDOF法)和随机波动态响应分析法两种[10]。单自由度法将自升式平台简化为质量-弹簧-阻尼的单自由度系统,假定波浪为规则波,忽略波浪激振力的随机性本质,且假定波浪激振力作用于质心。单自由度法计算公式如下:
(1)
式中:Ω表示周期比,Ω=Tn/Tw,Tn为平台的自振周期,Tw为波浪周期;ξ为阻尼比,ξ≤0.07。单自由度法形式简便,目前工程应用较多。但单自由度法一个比较明显的缺点是不能考虑流速的影响。
自升式平台随机波动态响应分析方程如下:

(2)

(3)

随机波动态响应分析法比较复杂,目前工程应用还不是很多。由于波浪拖曳力和自由面的非线性,随机波动态响应分析得到的自升式平台时域响应过程是非高斯过程,拖曳/惯性参数法(D/I法)是常用的响应极值求解方法之一。
1.1 动力放大因子的拖曳/惯性参数法
D/I法基于这样一个假定,即自升式平台的动态响应极值可由静态响应极值、惯性响应极值以及两者间的关联系数组合而得[11]:
Rd_mpm2=(CRsσRs)2+(CRiσRi)2
+2ρR(CRsσRs)(CRiσRi),
(4)
(5)
式中:Rd_mpm为动态响应最大可能值;CRs、CRi分别为静态响应和惯性响应最大值系数;σRd、σRs、σRi分别为动态响应、静态响应和惯性响应均方差;ρR为静态响应和惯性响应最大值间的关联系数。

(6)

(7)
D=8.0σRs(Cm=0),
M=3.7σRs(Cd=0),

式中:σRs(Cm=0)为不考虑惯性力的静态响应均方差;σRs(Cd=0)为不考虑拖曳力的静态响应均方差。因此,D/I法还需要分别分析不考虑惯性力和不考虑拖曳力的静态响应。
将式(2)中的质量矩阵和阻尼矩阵均设为零,即为平台的静态响应。平台的惯性响应则为动态响应与静态响应之差。
平台的动态响应最大可能值确定后,即按下式确定平台的动态响应最大可能极值Rd_mpme:
Rd_mpme=μRd+Rd_mpm,
(8)
式中:μRd为动态响应均值。
平台的静态响应最大可能极值Rs_mpme按下式确定:
Rs_mpme=μRs+CRsσRs,
(9)
式中:μRs为静态响应均值。
最终按下式确定平台的动力放大因子:

(10)
式中:FDAF为与周期比相关的比例放大系数,

式中: Tp表示波浪谱谱峰周期。
1.2 随机波生成
自升式平台随机波动态响应分析的随机波可由规则波随机线性叠加而得。可采用等分频率法划分频率区间,频率区间不少于200,每一个频率区间对应一个规则波。第i个规则波的波幅ai为
(11)

(12)
式中:εi为第i个组成波的初相位,是在(0, 2π)上均匀分布的随机数。
美国船级社(ABS)推荐使用JONSWAP谱生成随机波,峰值因子γ取3.3[10]。波浪谱的有效有义波高Hs和峰值周期Tp则由确定性波高极值Hmax和对应周期Tass转换而得:
(13)

式中:d表示水深,d≥25m;Hsrp表示风暴作用下3h回归周期对应的有义波高,
Hsrp=Hmax/1.75.
需要指出,式(13)引入了Wheeler扩展来修正浅水自由面的非线性效应。
2 算例分析

图1 算例平台模型Fig.1 Finite element (FE) model of sample unit
图1所示为算例平台的有限元分析模型。其中桩腿采用梁单元详细建模,保证刚度和水动力系数与实船一致;主船体、桩靴按刚度等效原则简化建模;桩腿与主船体的连接使用弹簧单元模拟[12]。模型采用笛卡尔直角坐标系,坐标原点位于船底板、中纵剖面与尾封板的交点处,纵向以指向船首为正,垂向以向上为正。限于篇幅,本文只考虑0°波流作用方向,如图2中箭头所示。图2中位于船体重心的水平负刚度弹簧,用来考虑P-Δ效应,弹簧刚度为-1 175kN/m。模型边界条件取为泥线下3m处铰支。计算波浪激励力时,忽略结构运动响应,阻尼比取0.07。波流载荷使用莫里森公式计算后直接施加到桩腿梁单元上。

图2 浪向角和计入P-Δ效应的水平弹簧Fig.2 Wave heading and horizontal spring for P-Δ effect
表1列出了平台与波流载荷随机动力分析有关的主要参数。

表1 算例平台主要参数Table 1 Main parameters of sample unit
注:De为等效直径。
本文使用的流速垂向分布如图3所示,即海底流速为零,流速从海底至瞬时波面处呈线性分布。研究选择的表面流速Vc=0~2.0m/s,间隔0.5m/s。
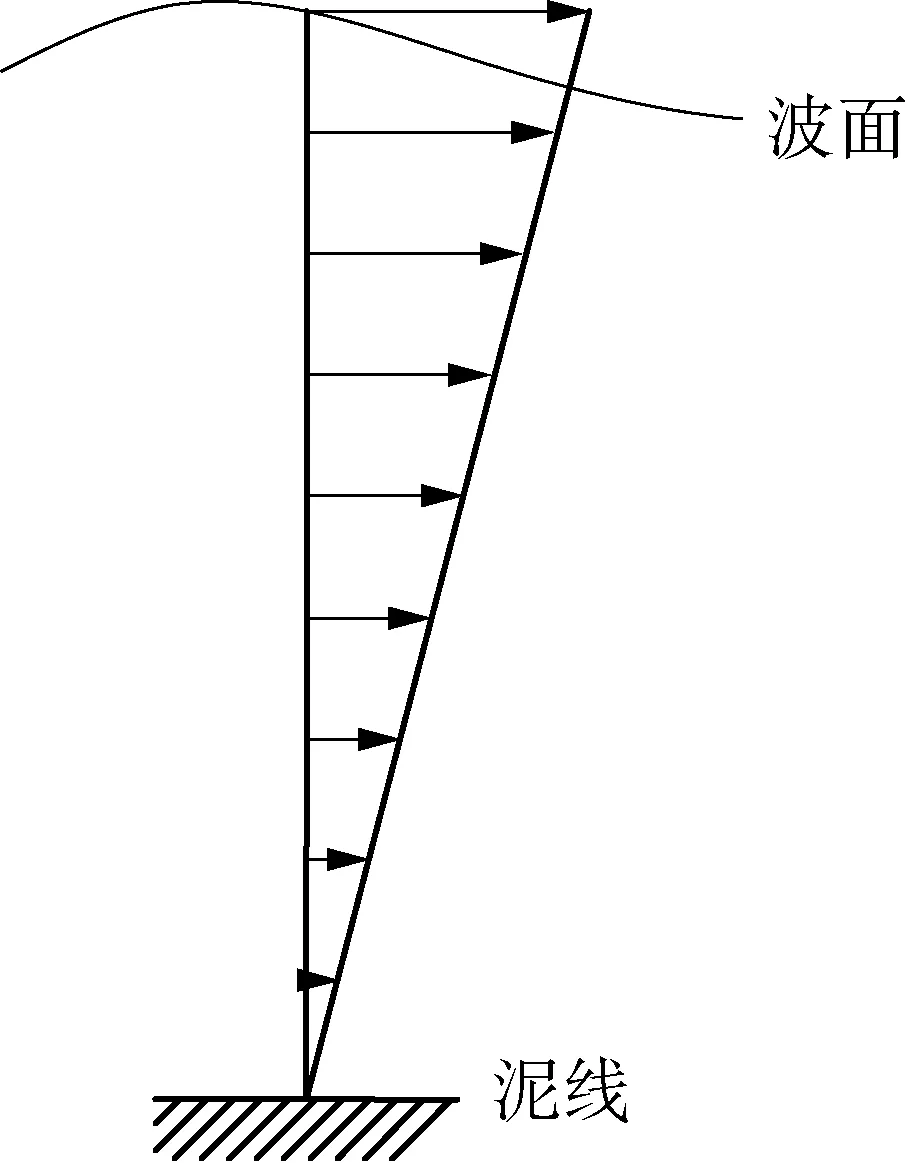
图3 流速垂向分布Fig.3 Vertical distribution of current speed
根据表1中波高和周期推算得到Hs=10.49m,Tp=15.26s,按γ=3.3的JONSWAP谱生成1h随机波。选择频率ω=0.05~2.5rad/s模拟不规则波,采用等分频率法划分频率区间,取Δω=0.025rad/s。算例随机波的波面升高时历曲线如图4所示,对应的波面升高平均值为0,均方差为2.62m,峰度为3.05,偏度为-0.029,最大波峰高度8.93m,满足ABS要求[10]。

图4 随机波波面升高时历Fig.4 Time history of random wave surface elevation
按D/I法的要求,通过式(2)分别进行不同流速的动态响应分析、静态响应分析、不考虑惯性力的静态响应分析以及不考虑拖曳力的静态响应分析,时间步长取0.5s。
图5显示了Vc=0和2.0m/s的桩基剪力的各个响应时历。从图5可以看出,随着流速的增大,平台的动态响应、静态响应和惯性响应幅值均增大。只有不考虑拖曳力的静态响应不随流速变化[图5(g)、(h)],这是因为流速对波流载荷的影响体现在拖曳力上。流速只具有单向性,随着流速的增大,流对动态和静态响应的抑制作用越加显著,平台动态和静态响应均值均逐渐偏向流力作用方向一侧,平台动态响应极值与静态响应极值的差异越来越小,这在图5(b)、 (d)、 (f)中表现得尤为明显。惯性响应时历则分别由图5(a)与图5(c)相减以及图5(b)与图5(d)相减而得。计算动力放大因子所需的响
应均方差值和平均值已在图中列出。

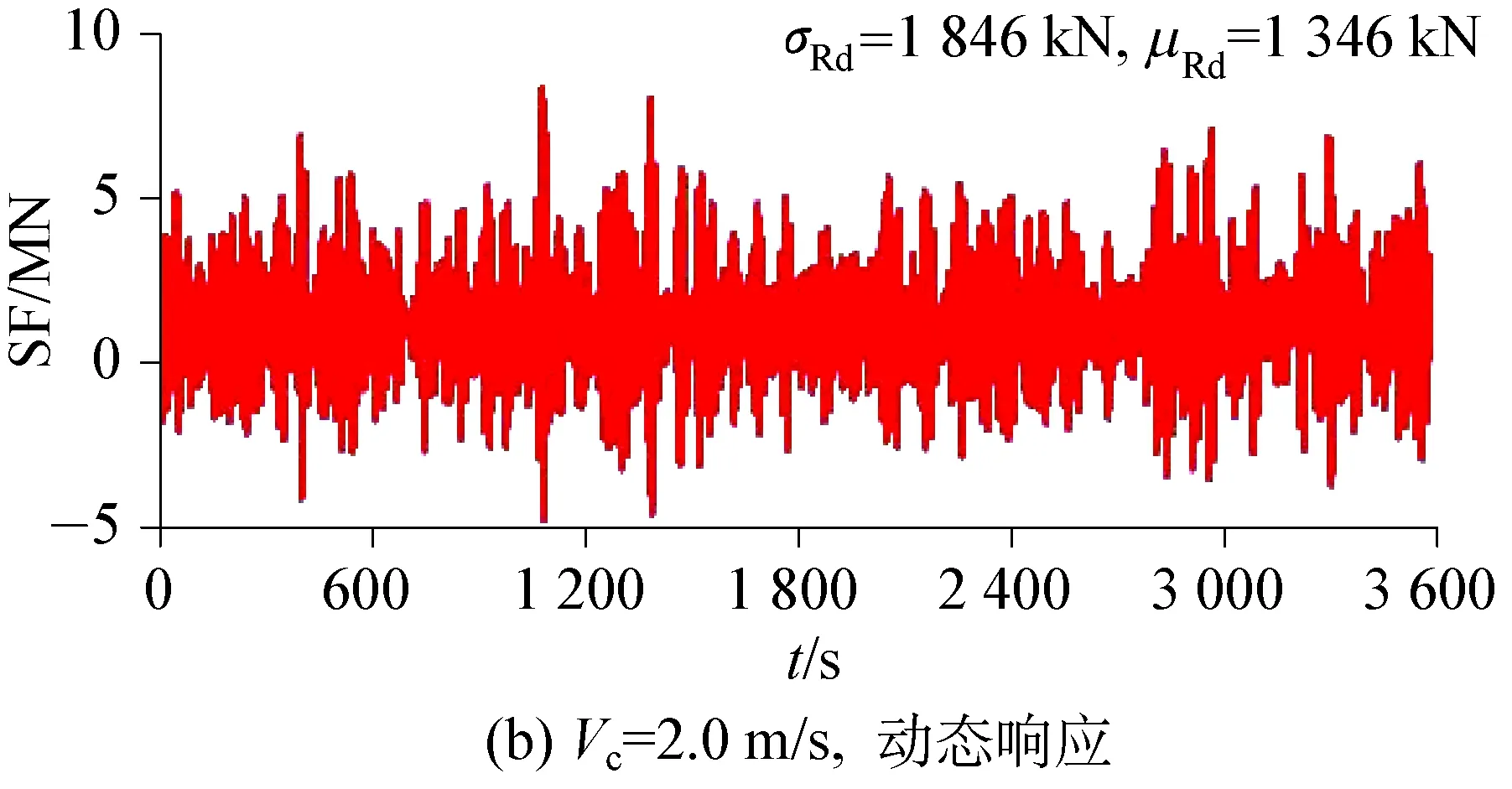


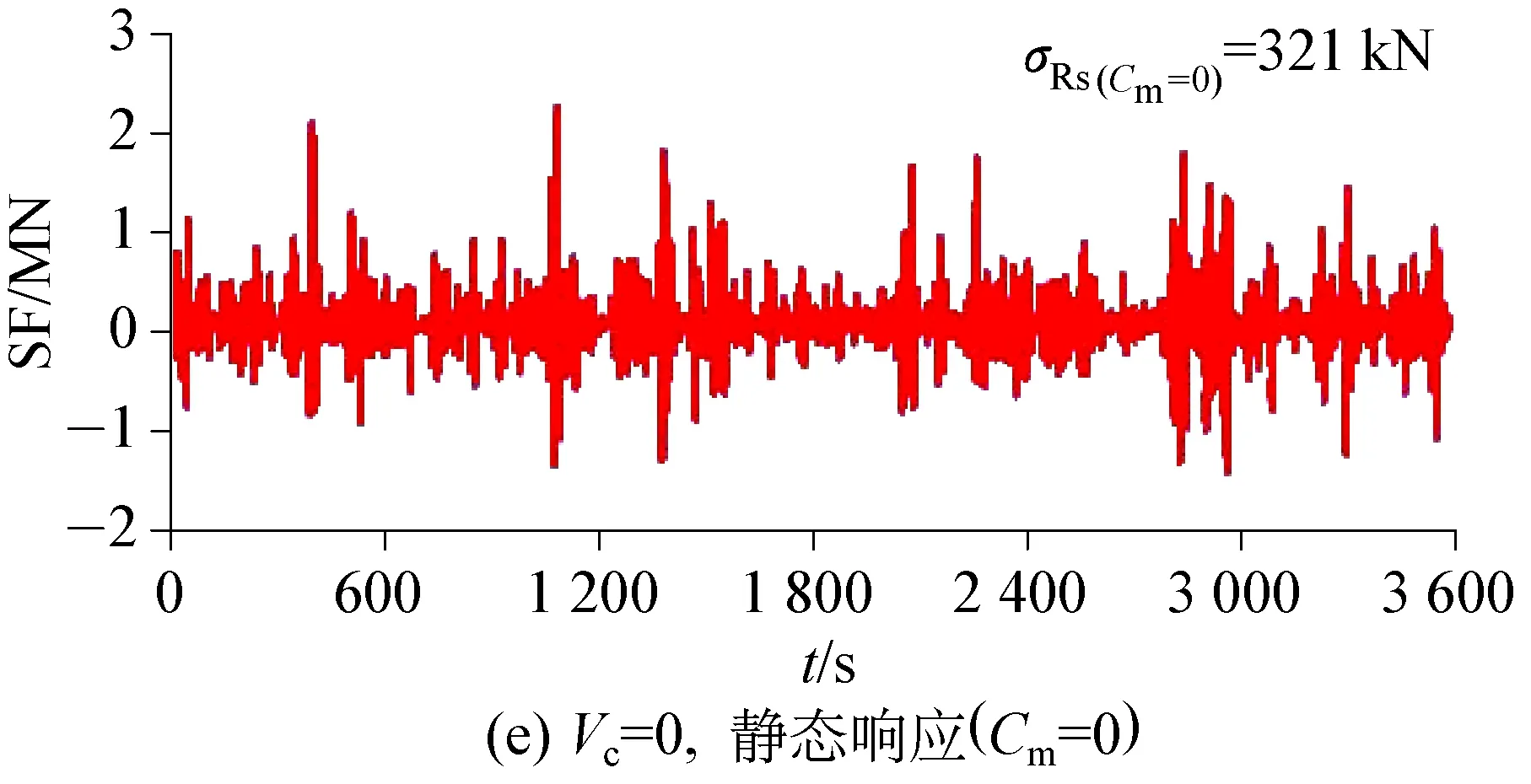

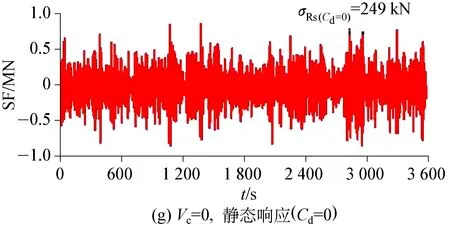
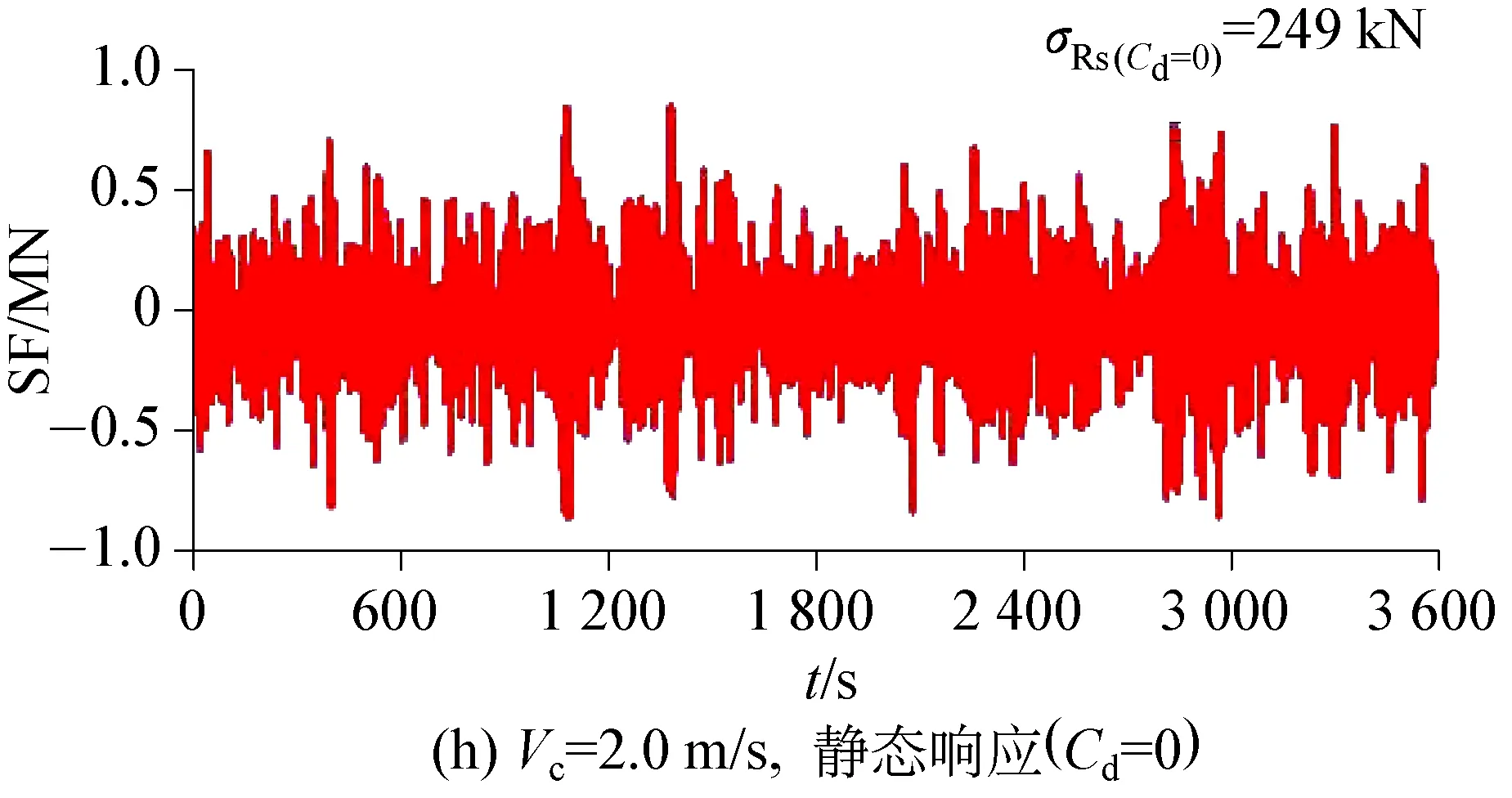
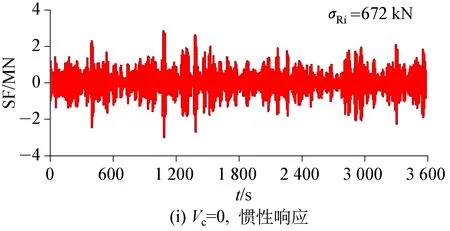
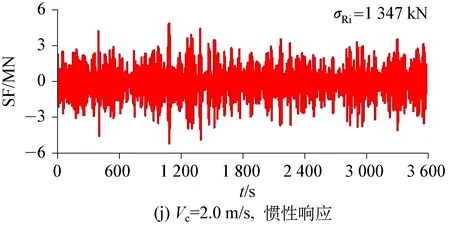
图5 算例平台桩基剪力响应时历
3 考虑流速影响的动力放大因子及惯性力比较
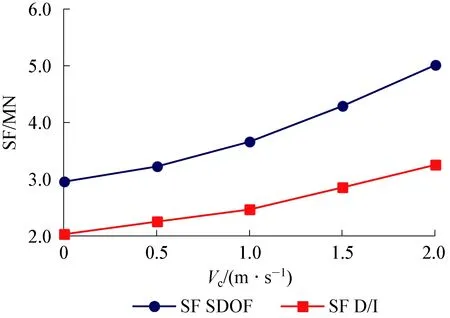
图6显示了按D/I法确定的不同流速下算例平台桩基剪力(SF)和倾覆力矩(BM)的动力放大因子,以及按SDOF法确定的动力放大因子。可以看出,随着流速逐渐增大,D/I法确定的桩基剪力和倾覆力矩的动力放大因子均快速减小。而SDOF法确定的动力放大因子不随流速而变,无法体现流速对平台动力放大因子的影响。
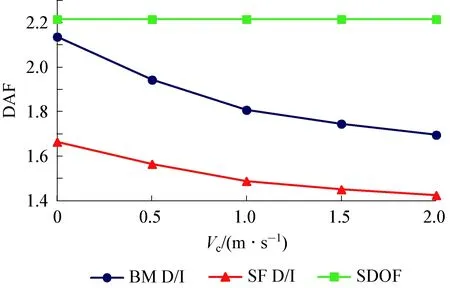
图6 不同流速下的动力放大因子比较Fig.6 Comparison of DAF at different current speeds
波流载荷对自升式平台的动力放大效应通过惯性力施加到平台上。D/I法确定的惯性桩基剪力FI和倾覆力矩MI分别按以下两式计算:
FI=(Fda_BS-1)Fmax,
(15)
MI=(Fda_BM-1)Mmax,
(16)
式中:Fda_BS和Fda_BM分别为桩基剪力和倾覆力矩的动力放大因子:Fmax和Mmax分别为通过确定性方法计算计入流速后的极端波高而得到的最大波流力和弯矩。
SDOF法确定的惯性桩基剪力FI和倾覆力矩MI分别按以下两式计算:
FI=(Fda-1)×Fwave amp,
(17)
MI=FI×d,
(18)
式中:d为平台垂向重心至桩腿约束点的垂向距离;Fwave amp为静态波流力幅值,
Fwave amp=0.5(Fmax-Fmin),
Fmin为通过确定性方法计算计入流速后的极端波高而得到的最小波流力。
按表1中列出的极端波高和对应周期,通过Stokes五阶波进行算例平台的波流载荷确定性分析。不同流速下的波流载荷最大值和最小值在表2中列出。
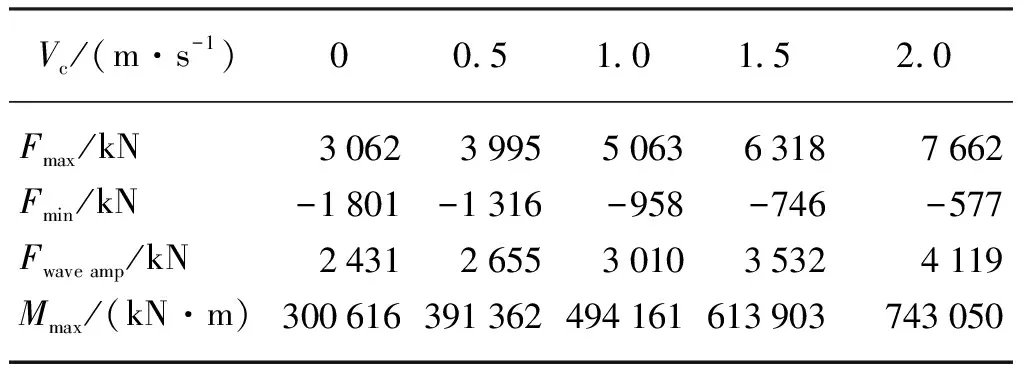
表2 不同流速下的波流力、弯矩最大值和最小值Table 2 Maximum and minimum wave forces and overturning moments at each current speed
(a) 桩基剪力

(b) 倾覆力矩图7 不同流速下的惯性力比较Fig.7 Comparison of inertial force at different current speeds
图7分别显示了按D/I法和SDOF法计算得到的惯性桩基剪力和倾覆力矩的差异。从图7可以看到,按SDOF法计算得到的惯性力显著大于按D/I法计算得到的惯性力。随着流速的增大,两种方法计算得到的惯性力都增大,但SDOF法计算得到的惯性力增大更为剧烈。流速2.0m/s时两种方法得到的惯性力差值基本达到不考虑流速时的2倍,这说明随着流速的增大,SDOF法得到的惯性力越来越偏于保守。进一步比较表2中的静态波浪力,可以看到随着流速的增大,Fmax增大的速度要比Fwave amp快得多。之所以D/I法计算得到的惯性力比SDOF法要小得多,原因是D/I法确定的动力放大因子随着流速增大而减小,抵消了Fmax快速增大的影响。
4 结 语
通过随机波动态响应分析法分析了某400英尺自升式钻井平台在不同流速下的动力放大因子和惯性力变化情况,并与单自由度法计算结果进行了简单比较。研究表明:
(1) 由于流是方向不随时间而变的定常流,即流载荷具有单向性,故流速越大,它对自升式平台运动响应的抑制越显著。尽管随着流速的增大,平台的动态、静态响应极值均增大,但两者间的差异越来越小,造成平台的动力放大因子越来越小。这从物理上解释了自升式平台动力放大因子随流速增大而减小的原因。
(2) 在波浪参数不变的前提下,流速增大,随机波动态响应分析法和单自由度法得到的自升式平台惯性力都随之增大。随机波动态响应分析法考虑了流速的影响,该方法得到的惯性力增大相对平缓。而单自由度法得到的惯性力增大较为剧烈,越来越偏于保守。两种方法确定的平台动力放大因子间的较大差异,是造成两种方法得到的惯性力间较大差异的主要原因。
因此,为合理评估自升式平台的动力放大因子和惯性力,尽管过程更为繁琐,流速较大时还是应采用随机波动态响应分析法。目前,F&G和GustoMSC等世界主流设计公司都已引入随机波动态响应分析法进行高规格、大水深自升式平台的设计。应用随机波动态响应分析法进行自升式平台的动力放大因子和惯性力分析,能够优化风暴环境条件下的桩腿设计载荷,避免无谓的桩腿结构加强,有利于控制空船重量,增加平台的可变载荷设计指标,从而提高平台在国际市场上的竞争力。这也是本研究的实际工程意义所在。
[1] Jenson J J. Dynamic amplification of jack-up platforms subjected to non-gaussian wave loads [J]. Journal of Research of the National Institute of Standards and Technology, 1998,99(4): 455.
[2] Lu Y J, Chen Y N, Tan P L, et al. Prediction of most probable extreme values for jack-up dynamic analysis [J]. Marine Structures, 2002,15(1): 15.
[3] Williams M S, Thompson R S G, Houlby G T. A parametric study of the non-linear dynamic behaviour of an offshore jack-up unit [J]. Engineering Structures, 1999,21(5): 383.
[4] Cassidy M J, Taylor P H, Taylor R E, et al. Evaluation of long-term extreme response statistics of jack-up platforms [J]. Ocean Engineering, 2002,29(13): 1603.
[5] Zhang X Y, Cheng Z P, Wu J F. Dynamic response of jack-up units—reevaluation of SNAME 5-5A four methods [C]. ISOPE, 2010: I-10-587.
[6] 黄盟宇,唐文勇,汪怡,等.自升式海洋平台动态放大因子分析与抑制[J].上海交通大学学报,2010,44(6): 816.
Huang Meng-yu, Tang Wen-yong, Wang Yi, et al. Analysis and suppression on the dynamic amplification factor of self-elevating offshore platform [J]. Journal of Shanghai Jiao Tong University, 2010,44(6): 816.
[7] Saeidtehrani S, Asgarian B, Daghigh M, et al. Calculation of dynamic amplification factor for jack-up structures [J]. International Geoinformatics Research and Development Journal, 2015,6(3): 15.
[8] Perry M J, Mobbs B. Factoring to improve conservatism of the drag-inertia method when determining dynamic amplification of jack-up units [C]. OMAE, 2011: 50335.
[9] 陈顺楠,乔方利,潘增弟,等.中国南海东部海域气候特征及风浪流极值参数的研究—LAGFD数值模式群的运用[J].黄渤海海洋,1998,16(2): 6.
Chen Shun-nan, Qiao Fang-li, Pan Zeng-di, et al. The study of climatic characters and wind, wave, current extreme parameters in the east of South China Sea: the application of LAGFD numerical models [J]. Journal of Oceanography of Huanghai & Bohai Seas, 1998,16(2): 6.
[10] American Bureau of Shipping. Guidance notes on dynamic analysis procedure for self-elevating units [S]. 2014.
[11] Maatschappij B V. Dynamic analysis and estimation of extreme response for jack-ups [R]. 1991.
[12] 郭东杰.在役自升式平台风暴自存状态强度评估[D].天津: 天津大学,2009.
Guo Dong-jie. Strength evaluation of jack-up in use under storm survival condition [D]. Tianjin: Tianjin University, 2009.
InfluenceofCurrentSpeedonDynamicAmplificationFactorofJack-UpUnits
MA Wang-kou1, YUAN Fei-hui2
(1.MarineDesign&ResearchInstituteofChina,Shanghai200011,China;2.ShanghaiWaigaoqiaoShipbuildingCo.,Ltd.,Shanghai200137,China)
Random wave dynamic response analysis method is studied and used to analyze a sample drilling jack-up unit. The result shows that current suppression on the dynamic and static responses of the unit increases as the current speed increases, but the dynamic amplification factor decreases meanwhile. The result also shows that the inertial force computed by random wave dynamic response analysis method increases relatively slowly since this method can take account of current effect. So random wave dynamic response analysis method should be selected to calculate dynamic amplification factor and inertial force under large current speed for optimizing structure design of legs and increasing variable deck load of jack-up units.
dynamic amplification factor; random wave dynamic response analysis method; current speed; inertial force
2017-06-19
工业和信息化部高技术船舶科研项目“自升式钻井平台品牌工程(Ⅰ型)”(工信部联装[2014]507号文)
马网扣(1978—),男,高级工程师,主要从事海洋工程设计和研发工作。
U661.3
A
2095-7297(2017)05-0293-07
