海上多浮体作业系统运动响应数值模拟及模型试验
2018-01-09韩旭亮王世圣喻西崇
韩旭亮, 谢 彬, 王世圣, 喻西崇, 李 焱
(中海油研究总院,北京 100028)
海上多浮体作业系统运动响应数值模拟及模型试验
韩旭亮, 谢 彬, 王世圣, 喻西崇, 李 焱
(中海油研究总院,北京 100028)
为了保证海上多浮体作业系统的安全性和可靠性,基于三维势流理论,采用延迟函数方法,建立了波浪中多浮体作业系统耦合运动的数学模型。该方法充分考虑了多浮体兴波水动力相互作用的影响,综合考查了多浮体在不同浪向角波浪中的运动响应。计算分析了运输船靠近单柱式(Spar)平台安装作业在不同浪向中的运动响应情况,并与模型试验进行比较。研究结果表明,不同浪向中运输船运动响应的数值模拟结果和模型试验结果具有良好的一致性,证明了数学模型的合理性。多浮体系统靠近作业会产生局部波浪放大或遮蔽效应。
势流理论;多浮体;延迟函数;运动响应;模型试验
0 引 言
多浮体靠近作业是海上操作的常用模式,在船舶靠帮物资补给、潜水器从母船下放与回收、浮式液化天然气装置(FLNG)旁靠与尾靠输油系统和海洋平台安装就位等船舶与海洋工程领域发挥着重要作用。
单个浮体在外界波浪激励的作用下会产生六自由度运动,而浮体运动兴起波浪会导致多浮体系统之间存在水动力相互作用。这往往会使多浮体系统产生剧烈运动,并造成恶劣的不利影响,甚至导致多浮体之间发生碰撞,严重威胁其安全性。由此可见,多浮体作业系统运动响应是海洋工程技术开发的关键问题。
国内外学者致力于从频域理论角度运用三维分布源方法[1]、高阶边界元方法[2—3]、模态方法[4]等研究多浮体水动力相互干扰作用下的稳态响应问题。同时现在常用的WAMIT[5], HydroSTAR[6]等水动力软件基于三维势流频域理论来计算多浮体运动响应,但要处理瞬态或者非线性水动力问题就显得无能为力。近年来,许多学者从时域理论角度对波浪中多浮体的运动响应进行了不同数值模拟方法的研究,主要有时域格林函数方法[7—8]、时域Rankine源方法[9]、QALE-FEM方法[10]和延迟函数方法[11—13]。其中,前三者是在时域中直接计算多浮体时域水动力,而延迟函数方法是将频域水动力系数通过傅里叶变换得到间接时域水动力。相比其他方法,延迟函数方法具有计算速度快、计算效率高的特点。一旦知道延迟函数,就可以通过卷积计算任意波浪情况下多浮体系统的运动响应。
本文采用三维势流理论的延迟函数方法,建立了波浪中多浮体系统耦合运动的数学模型。该方法充分考虑了多浮体兴波水动力相互作用的影响,综合考查了多浮体在不同浪向角波浪中的运动响应。计算了运输船靠近单柱式(Spar)平台安装作业在不同浪向中的运动响应特性,并与水池模型试验结果进行比较,得到一致的结论。
1 理论模型
1.1 坐标系的建立


图1 浮体m和l的坐标系示意图Fig.1 Schematic diagram of the coordinate systems of floating bodies m and l
1.2 定解条件
假设流域中为理想流体。多浮体作业系统由N个零航速浮体组成,浮体m的速度势φm可以表示为
(1)

流场中的浮体速度势要满足的边界条件如下。
拉普拉斯方程
2φm=0(流域中).
(2)
线性自由面条件

(3)
浮体m绕射物面边界条件
(4)
物面单位法向量n指向其外侧。
辐射边界条件如下。
浮体l在浮体m的辐射势边界条件
(5)
浮体m对自身的辐射势边界条件
(6)
底部条件为

(7)
无穷远辐射条件为

(8)
1.3 延迟函数
利用Kramers-Kronig关系[14],可以得到多浮体作业系统延迟函数为
(9)


(10)
将计算频率ω∈(0,Ω)分为N+1个子区域,即(ωn,ωn+1)和(ωN+1, ∞),n=1, 2, …,N,采用半解析方法[15]计算延迟函数。
1.4 辐射水动力
根据伯努利方程,将浮体m的动压力在其湿表面积分,得到辐射水动力的第k个分量为[14]
(11)

1.5 多浮体系统的运动响应方程
根据牛顿第二定律,浮体总数为N的多浮体系统的运动响应方程为[16]
(12)

2 水池模型试验
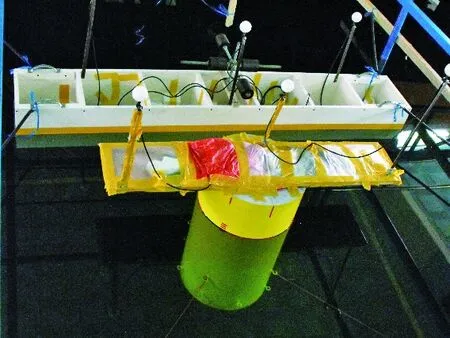
水池一端装有摇板造波机,另一端设有消波岸。模型试验由运输船和Spar平台组成,表1和表2分别给出了它们的主尺度参数。运输船的横摇回转半径和纵摇回转半径分别为10.82m和48.33m; Spar平台的横摇回转半径和纵摇回转半径分别为18.48m和12.91m。模型试验中需要设计一个用于固定平台、运输船及系泊系统的钢架。运输船和Spar平台均采用弹簧和细钢丝绳(忽略钢丝绳的伸长)进行水平系泊,系泊刚度系数为24 N/m。图2
给出了模型试验的安装布置图。模型缩尺比为88。
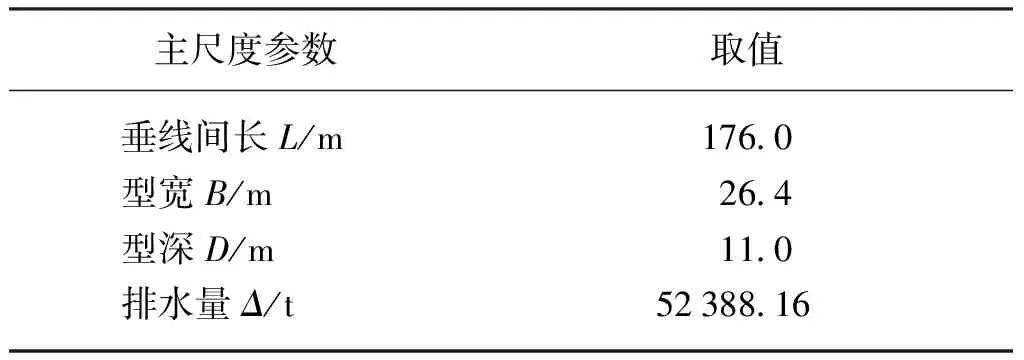
表1 运输船的主尺度参数Table 1 Principal parameters of transport ship

表2 Spar平台的主尺度参数Table 2 Principal parameters of spar platform
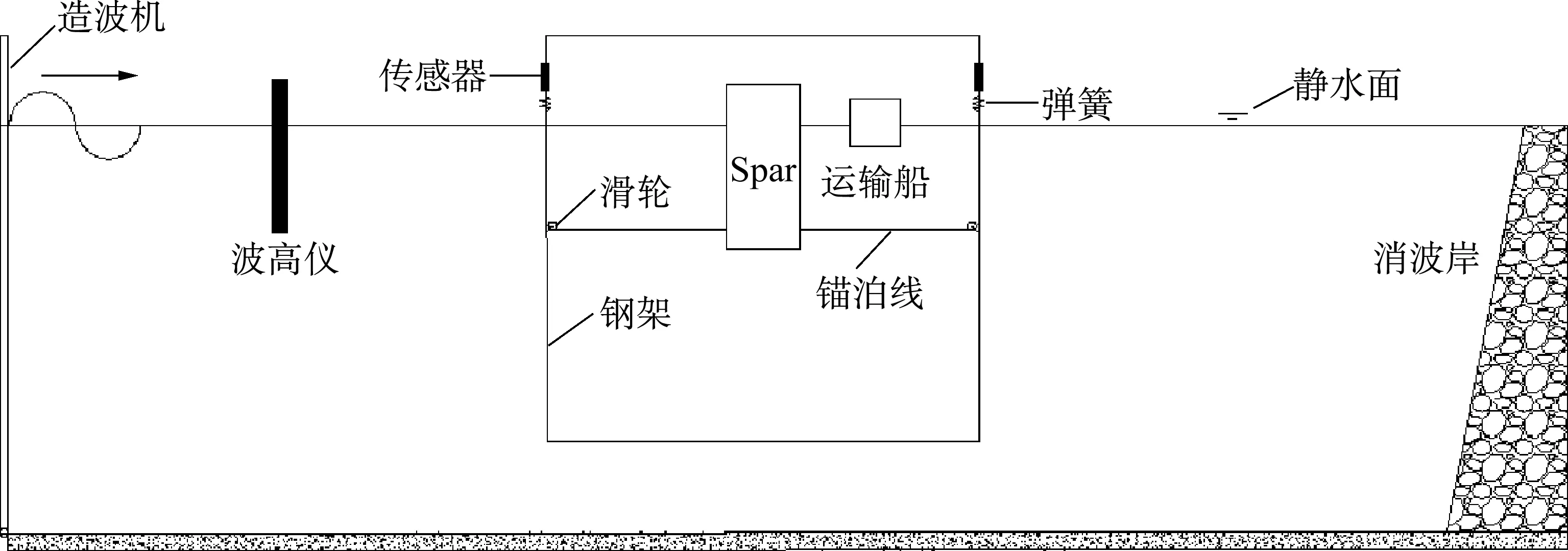
图2 模型试验的安装布置图Fig.2 Arrangement and layout of model test
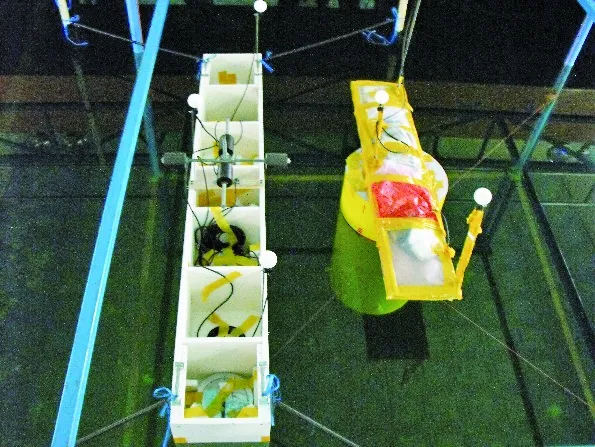
浮体的运动响应利用一个光学测量系统“Qualisys Track Manager”进行采集,采样频率为30Hz。将6个(每个模型3个)标记辐射的红外光球通过支架,分别固定在两个模型顶部,摄像机通过捕捉6个标记辐射红外光球的轨迹,记录模型的运动响应情况。模型试验内容进行了不同浪向角规则波浮体运动响应测量试验,如图3所示,入射波从图中左侧向右侧传播,浪向角分别为90°,180°和270°。
(a) 浪向角90°
(b) 浪向角180°
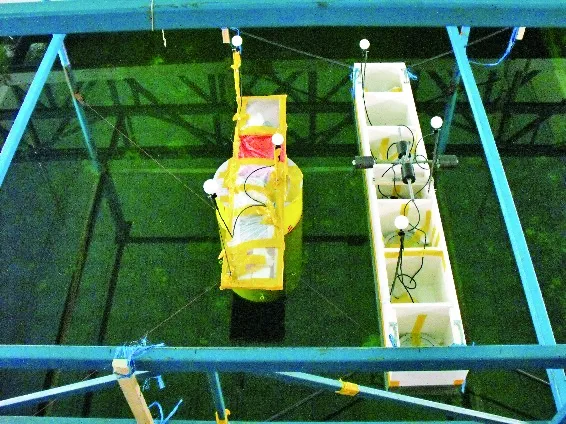
(c) 浪向角270°图3 水池模型试验Fig.3 Model test in tank
3 试验结果与讨论
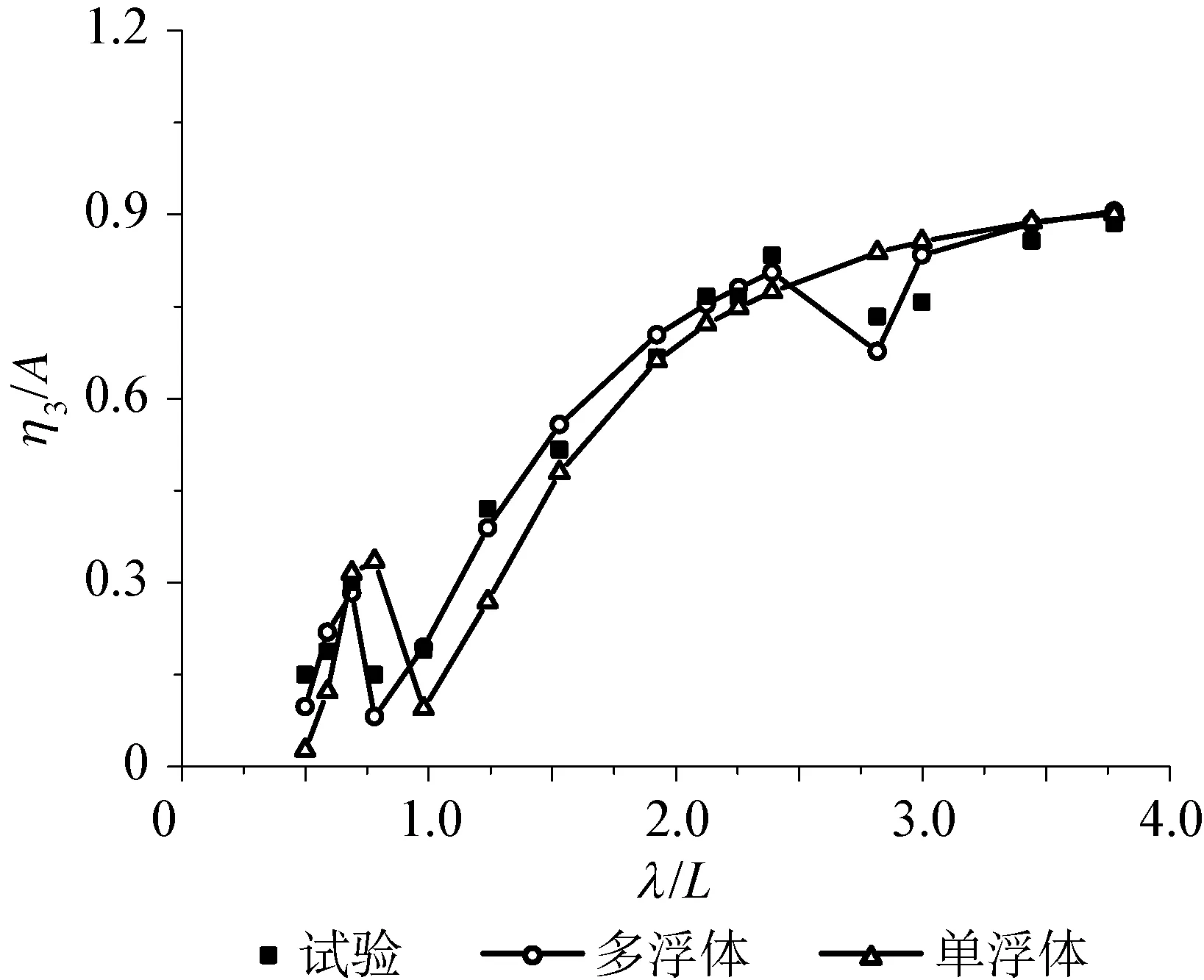
图4 运输船垂荡响应,θ=180°Fig.4 Heave motion of transport ship, θ=180°

图5 运输船横摇响应,θ=180°Fig.5 Roll motion of transport ship, θ=180°

图6 运输船垂荡响应,θ=270°Fig.6 Heave motion of transport ship, θ=270°
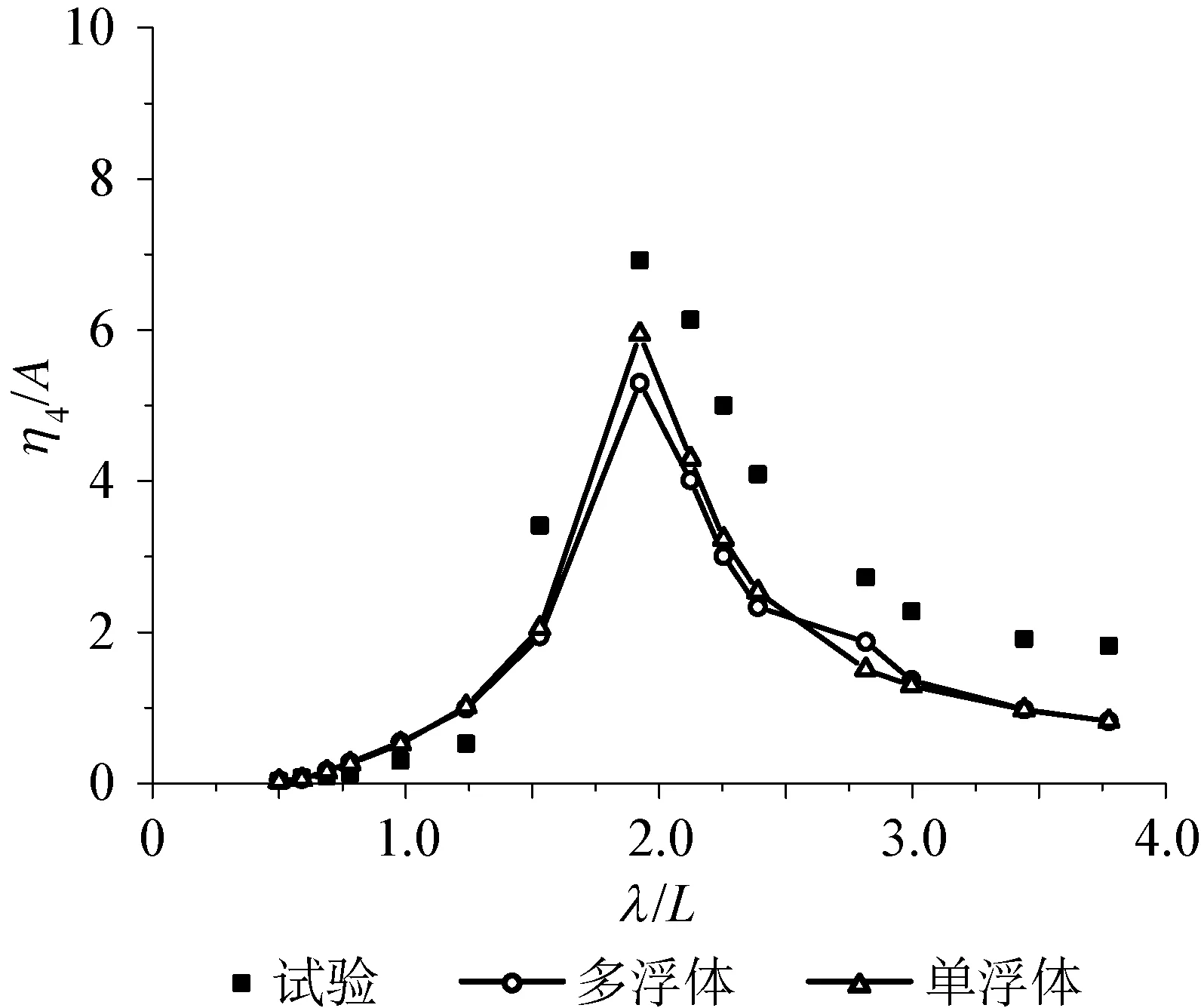
图7 运输船横摇响应,θ=270°Fig.7 Roll motion of transport ship, θ=270°

图8 运输船垂荡响应,θ=90°Fig.8 Heave motion of transport ship, θ=90°
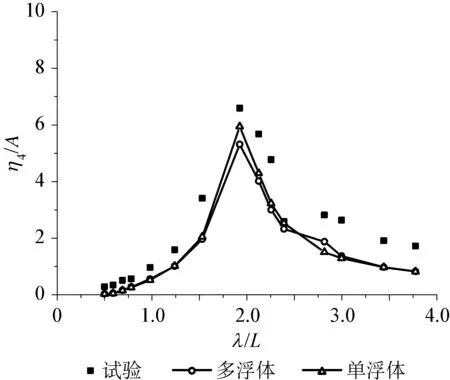
图9 运输船横摇响应,θ=90°Fig.9 Roll motion of transport ship, θ=90°
图4~9分别给出在不同浪向角(迎浪180°、横浪270°和90°)的规则波作用下,运输船的垂荡η3和横摇η4运动响应的试验测量、多浮体和单浮体数值计算的三者对比。图中L为船长,即垂线间长;A为入射波的波幅;λ为波长。可以看出,多浮体数值模拟和模型试验的结果在幅值和趋势上都吻合较好,说明本文方法可以有效研究模拟多浮体系统的运动响应特性。从图5中可以发现,由于多浮体情况下运输船与Spar平台之间存在水动力相互干扰作用,故迎浪180°时运输船的横摇运动响应值与单浮体情况不同,并不等于零。在波长较小时,运输船与Spar平台的水动力相互干扰作用较弱,横摇运动响应较小,试验结果不易测量,故试验结果和数值结果差别较大。从图7和图9中可以看出,运输船横摇响应的数值模拟结果比模型试验结果较低,这可能是由于水平系泊对运输船限制作用较大造成的影响,但是本文数值模拟结果的曲线趋势和峰值频率都与模型试验结果一致。从图5、图7和图9中还可以发现,在浪向角为迎浪180°时Spar平台对运输船会产生局部波浪放大效应,使得横摇运动响应并不为零。而在浪向角为横浪270°和90°时Spar平台对运输船会产生局部波浪遮蔽效应,但影响不是很大。这是由于Spar平台为细长浮体,其直径约为运输船垂线间长的1/5,故波浪遮蔽效应较小。Spar平台为小水线面浮体且吃水较深,运动响应较小,故本文对其运动响应不作详细讨论。同时,Spar平台具有总体运动稳定性高的特点,它也常用作深水油田开发的首选平台[17]。
4 结 语
本文采用三维势流理论的延迟函数方法,充分考虑了多浮体兴波水动力相互作用的影响,建立了波浪中多浮体作业系统耦合运动响应的数学模型,计算了运输船靠近Spar平台作业在不同浪向中的运动响应特性,并与水池试验进行比较。研究结果表明:
(1) 不同浪向角下多浮体运动响应的数值模拟结果和模型试验结果具有良好的一致性,证明了数学模型的合理性,说明该方法可以准确模拟多浮体系统运动响应特性。
(2) 迎浪180°时,Spar平台对运输船会产生局部波浪放大效应,横摇运动响应与单浮体情况不同,并不为零。
(3) 横浪270°和90°时,Spar平台对运输船会产生局部波浪遮蔽效应,由于Spar平台为细长浮体,波浪遮蔽效应较小,故影响不是很大。
本文提供的方法可用于分析多浮体存在相互干扰作用时近距离作业的安全性,为多浮体作业系统提供技术支撑和保障。
[1] Fang M C, Chen G R. On three-dimensional solutions of drift forces and moments between two ships in waves [J]. Journal of Ship Research, 2002,46(4): 280.
[2] Kashiwagi M, Endo K, Yamaguchi H. Wave drift forces moments on two ships arranged side by side in waves [J]. Ocean Engineering, 2005,32: 529.
[3] 史琪琪,柏木正,杨建民,等.基于高阶边界元法和波浪交互理论的三维相邻多浮体问题研究[J].船舶力学,2012,16(5): 504.
Shi Qi-qi, Kashiwagi M, Yang Jian-min, et al. Research on 3-D problem of adjacent multiple floating bodies based on HOBEM and wave interaction theory [J]. Journal of Ship Mechanics, 2012,16(5): 504.
[4] 王桂波,勾莹,滕斌,等.铰接多浮体系统在规则波作用下的运动响应[J].大连理工大学学报,2014,54(6): 618.
Wang Gui-bo, Gou Ying, Teng Bin, et al. Motion responses of hinged multiple floating bodies under regular wave action [J]. Journal of Dalian University of Technology, 2014,54(6): 618.
[5] WAMIT Inc. WAMIT user manual [M]. Chestnut Hill: WAMIT Inc., 2008.
[6] Bureau Veritas. Hydrostar user manual [M]. Paris: Bureau Veritas, 2014.
[7] Zhu R C, Miao G P, You Y X. Influence of gaps between 3-D multiple floating structures on wave forces [J]. Journal of Hydrodynamics, 2005,17(2): 141.
[8] 朱仁传,朱海荣,缪国平.具有小间隙的多浮体系统水动力共振现象[J].上海交通大学学报,2008,42(8): 1238.
Zhu Ren-chuan, Zhu Hai-rong, Miao Guo-ping. Influences on hydrodynamics of multiple floating structures with small gap in between [J]. Journal of Shanghai Jiao Tong University, 2008,42(8): 1238.
[9] Kim K, Kim Y, Kim M. Time-domain analysis of motion responses of adjacent multiple floating bodies in waves [C]. ISOPE, 2008: 301.
[10] Yan S Q, Ma Q W, Cheng X M. Fully nonlinear hydrodynamic interaction between two 3D floating structures in close proximity [J]. International Journal of Offshore and Polar Engineering, 2011,21(3): 178.
[11] 孙海晓,倪健,王宽,等.SPAR平台与半潜船波浪上相对运动分析研究[J].中国海洋平台,2013,28(4): 46.
Sun Hai-xiao, Ni Jian, Wang Kuan, et al. Analysis of relative motion between SPAR and semi-submersible floating in waves [J]. China Offshore Platform, 2013,28(4): 46.
[12] 王志东,刘晓健,陈剑文,等.单点系泊FPSO与油轮串靠外输时的水动力干扰及运动特性研究[J].江苏科技大学学报(自然科学版),2013,27(3): 205.
Wang Zhi-dong, Liu Xiao-jian, Chen Jian-wen, et al. Hydrodynamic interactions and motion responses of single point moored FPSO-tanker system in tandem offloading operation [J]. Journal of Jiangsu University of Science and Technology (Natural Science Edition), 2013,27(3): 205.
[13] Xu X, Yang J M, Li X, et al. Time-domain simulation for coupled motions of three barges moored side-by-side in floatover operation [J]. China Ocean Engineering, 2015,29(2): 155.
[14] 戴遗山,段文洋.船舶在波浪中运动的势流理论[M].北京: 国防工业出版社,2008: 182.
Dai Yi-shan, Duan Wen-yang. Potential flow theory of ship motions in waves [M]. Beijing: National Defense Industry Press, 2008: 182.
[15] Cao Y S. A procedure for evaluation, assessment and improvement of added mass and radiation damping of floating structures [C]. OMAE, 2008: 57275.
[16] Han X L, Duan W Y. Time domain analysis of multiple floating bodies interactions for offshore operation [C]. Proceedings of the Seventh International Workshop on Ship Hydrodynamics, 2011.
[17] 张辉,王慧琴,王宝毅.国外SPAR平台现状与发展趋势[J].石油工程建设,2011,37(S1): 1.
Zhang Hui, Wang Hui-qin, Wang Bao-yi. Current status of overseas SPAR and its development prospect [J]. Petroleum Engineering Construction, 2011,37(S1): 1.
NumericalSimulationandModelTestoftheMotionResponsesofMulti-BodyFloatingOperationSystematSea
HAN Xu-liang, XIE Bin, WANG Shi-sheng, YU Xi-chong, LI Yan
(CNOOCResearchInstitute,Beijing100028,China)
In order to ensure the safety and reliability of multi-body floating operation system at sea, we present the retardation function approach based on the three-dimensional (3D) potential flow theory. The mathematical model of the coupled motion responses of multi-body floating operation system is established. The effect of hydrodynamic interaction of multi-body floating system is fully taken into account, and the motion responses of multi-body floating system are tested comprehensively under different wave headings. The motion performance of transport ship in close proximity to spar platform is investigated for offshore installation operation under different wave headings. Then the numerical simulation results are presented and compared with the model test results. Satisfactory agreements are achieved, proving the validity of the mathematical model. From the results, it is found that the local wave may generate an amplification or shadowing effect for multi-body system in close proximity offshore operation.
potential flow theory; multi-body floating; retardation function; motion responses; model test
2017-02-08
国家科技重大专项(2016ZX05028-002);国家自然科学基金(51609267)
韩旭亮(1985—),男,博士,工程师,主要从事海洋工程浮式结构物方面的研究。
U661.32
A
2095-7297(2017)05-0287-06
