天狼星无人机免像控技术在河道整治中的应用
2018-01-05刘建良
刘建良,杨 琦,杨 军
(1. 北京优飞全景科技有限公司,北京 101102; 2. 金昌市城乡规划研究院,甘肃 金昌 737100)
天狼星无人机免像控技术在河道整治中的应用
刘建良1,杨 琦1,杨 军2
(1. 北京优飞全景科技有限公司,北京 101102; 2. 金昌市城乡规划研究院,甘肃 金昌 737100)
针对河道带状复杂的地形条件及高精准的测量要求,提出了采用天狼星无人机航空测图系统进行地形图测绘的方法,并用实例进行了验证。验证结果表明,天狼星无人机航测系统通过其内置100 Hz实时动态差分RTK技术和高精度惯性导航IMU系统,很好地解决了照片匹配等问题,在不需要布设像控点的情况下获取高精度的影像数据,大大提高了航测效率;同时河道整治过程中所遇到的土方量计算、洪水分析等问题将得到更加精确直观的呈现,为后续河道综合整治工作提供了精准的数据支持。
无人机;免像控;河道;数据处理
“绿水青山”是我国长期以来一贯坚持的环境保护政策,河流不仅改善着环境,也为人类的生产生活提供着重要的物质资源。随着人们环境意识的提高,河道综合治理工程也越来越被人们所重视。目前常规的测量技术难以高效全面地获取河道及周边流域的地形情况,给河道整治工作的后续开展带来困难。拓普康天狼星(Sirius Pro)无人机测图系统,以其机动灵活、低成本的特点,可以快速、高效、准确地获取高精度、高分辨率的多元数据,并通过后处理软件快速完成大比例尺地形图的制作。高精度数字正射影像图(DOM)和数字表面模型(DSM)数据的叠加可在河道整治项目中更加方便、快捷、直观地判别河道地形地貌情况,同时天狼星测图系统的免像控技术,大大减少了外业作业时间,更加快速地保障了河道整治前期工作的开展。本文以甘肃省定西市河道整治项目为例,对天狼星免像控技术在河道整治中的应用进行探讨。
1 拓普康天狼星无人机测图系统
1.1 系统简介
拓普康天狼星无人机测图系统主要包含无人机飞行平台、数据通信平台和数据后处理系统。Sirius Pro无人机测图系统机身采用超轻泡沫材料,平台主要性能参数见表1。
1.2 航测作业流程
在下达任务后,首先进行项目技术设计,对整个项目流程方案进行规划设计,确保任务顺利实施。为保障天狼星无人机外业航飞的顺利进行,需要对项目规划区域进行实地踏勘,起降场地的适合选择也是确保飞行安全的重要因素;同时在测区内进行基准站点和检核点的布设及采集,基准站点是为无人机飞行平台GPS RTK基准站而进行的布设,检核点是为影像数据成果检核时提供对比。
在完成上述准备工作后,开始进行航线规划设计,天狼星无人机采用自主研发的Mavinci Desktop飞行计划软件对测量区域进行航线设计。将规划好的航线发送到无人机,无人机将按照规划航线进行作业飞行,航飞任务结束后无人机自动将航拍POS数据传回计算机,并与影像照片进行匹配,导入PhotoScan Pro软件处理生成DOM、DSM和点云数据。为确保成果影像的精度,通过采集影像数据检核点位置坐标与检核点实测坐标进行比较,以来进行产品质量控制,确保上交的影像数据符合设计精度。无人机测图系统测量工作流程如图1所示。

表1 Sirius PRO无人机测图平台主要性能参数
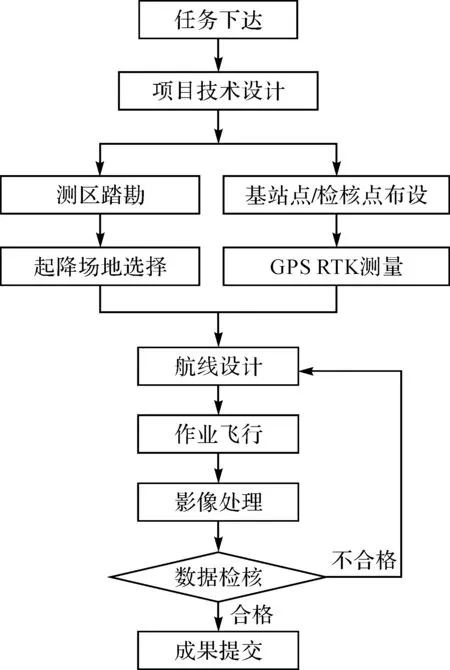
图1 无人机测图工作流程
2 项目应用
2.1 测区概况
本次河道整治项目位于甘肃省定西市,通渭县属陇中黄土高原丘陵壑区,多黄土梁、峁和河谷阶地,地势西北高,东南低,海拔1600~2200 m。本次项目河道由牛骨河、西河和黄龙河3条河道构成,其中牛骨河河道为自西向东穿过通渭县城区,西河和黄龙河都汇入牛骨河,位于105°06′12″E—105°23′09″E,30°08′19″N—30°15′38″N范围内。整个河道项目全长约52 km,河道两侧多为沟壑地带,河堤处有耕地。
2.2 航线规划与参数设定
根据河道走向及周边地形的起伏变化,为保障获取高精度的影像数据,确保无人机作业安全,本次无人机航线设计中,采用自适应地形变化模块。自适应地形飞行是在Mavinci Desktop飞行控制软件中设置固定飞行高度后,飞机随着地形起伏变化而自动改变飞行高度。固定航高飞行保证了飞机拍摄影像过程中像片重叠度,既避免遇到地形凸起时像片重叠度过小,无法满足影像重叠规范要求,又避免在地形低洼处像片重叠度过大,造成飞行浪费。自适应地形飞行可以很好地避免在地形起伏较大的区域撞击到山体等障碍物。本次项目飞行航线如图2所示。
图2 自适应地形航线飞行模式
根据河道长度及走势情况,本次项目共设计12条带状航线(如图3所示),带宽为200 m,地面采样距离(GSD)为7 cm,飞行高度为272 m,航向重叠为75%~85%,旁向重叠为65%。
2.3 数据处理
基于天狼星无人机航测系统获取影像的特点,利用Agisoft Photoscan Professional后处理软件,首先将影像和高精度POS数据导入,基于SIFT算法对照片特征点进行匹配,再根据高精度POS数据将像片对齐,全自动生成密集点云、网格、纹理等,最终得到点云数据(如图4所示)、DEM(如图5所示)和DOM(如图6所示)等数字化产品。
图3 航带规划
图4 点云数据
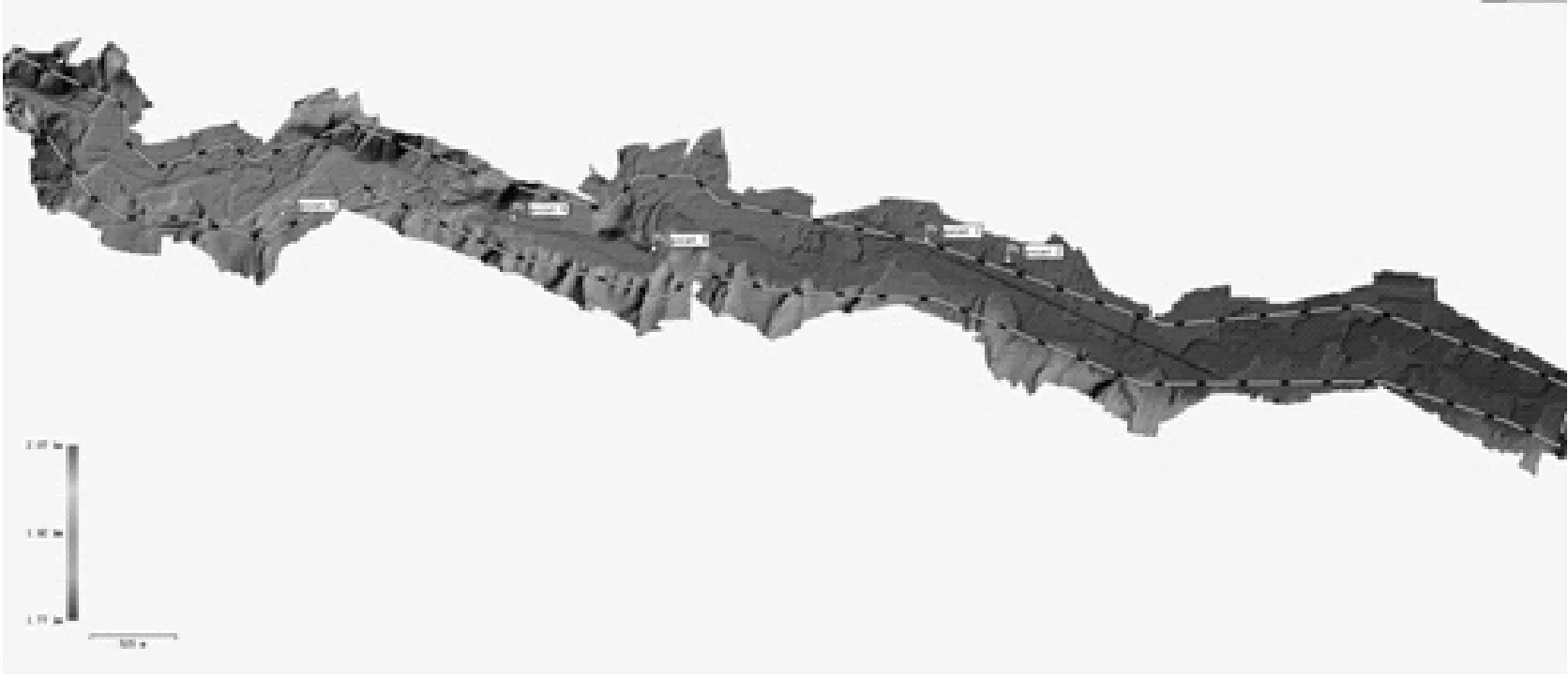
图5 DEM

图6 DOM
利用PhotoScan处理的数字化成果进行数字线划地图(DLG)的绘制。本项目采用清华山维EPS软件和Virtual Surveyor虚拟测图软件,可以根据DEM和DOM影像数据生成三维实景模型。截取部分DLG成果,如图7所示。
3 精度检核
为保证数据的精度要求,采集测区内28个检核点坐标,检核点布设如图8所示,依次编号为m1—m28,这些点主要位于道路等空旷平坦的地表。测区所设置检核点的实测坐标和图上坐标的平面差值即平面差值。再根据点位中误差公式计算出每个点的平面中误差。高程精度即通过外业实测获得的高程检核点坐标值和DEM上相对应的检查点上量测的高程值之差。且误差进行分析,看能否满足1∶2000大比例尺DOM和DEM精度规范要求。根据要求当检核点数量少于20个时,误差的算术平均值代替中误差,当数量大于或等于20个时,按中误差进行统计。本项目检核点精度见表2,分别统计X、Y和H方向的中误差。

图7 1∶2000 DLG成果
图8 影像检核点
根据表2各点坐标较差,计算出各点X、Y和H的中误差分别为0.070、0.067和0.136 m。可以得出本次项目检核点平面位置中误差为0.097 m,高程中误差为0.136 m,符合1∶2000的成图要求。
4 结 语
本文通过对天狼星无人机测图系统在河道整治项目的应用分析,充分证明无人机航测系统正逐步发生着变革,传统航测技术对像控点布设、绘图人员的技术水平都有较高的要求,在一定程度上大大降低了航测效率,增加了额外成本。而天狼星无人机航测系统通过其内置100 Hz实时动态差分RTK技术和高精度惯性导航IMU系统, 很好地解决了像片匹配等问题,在不需要布设像控点情况下获取高精度的影像数据。同时河道整治过程中所遇到土方量计算、洪水分析等问题将变得更加精确直观地呈现。
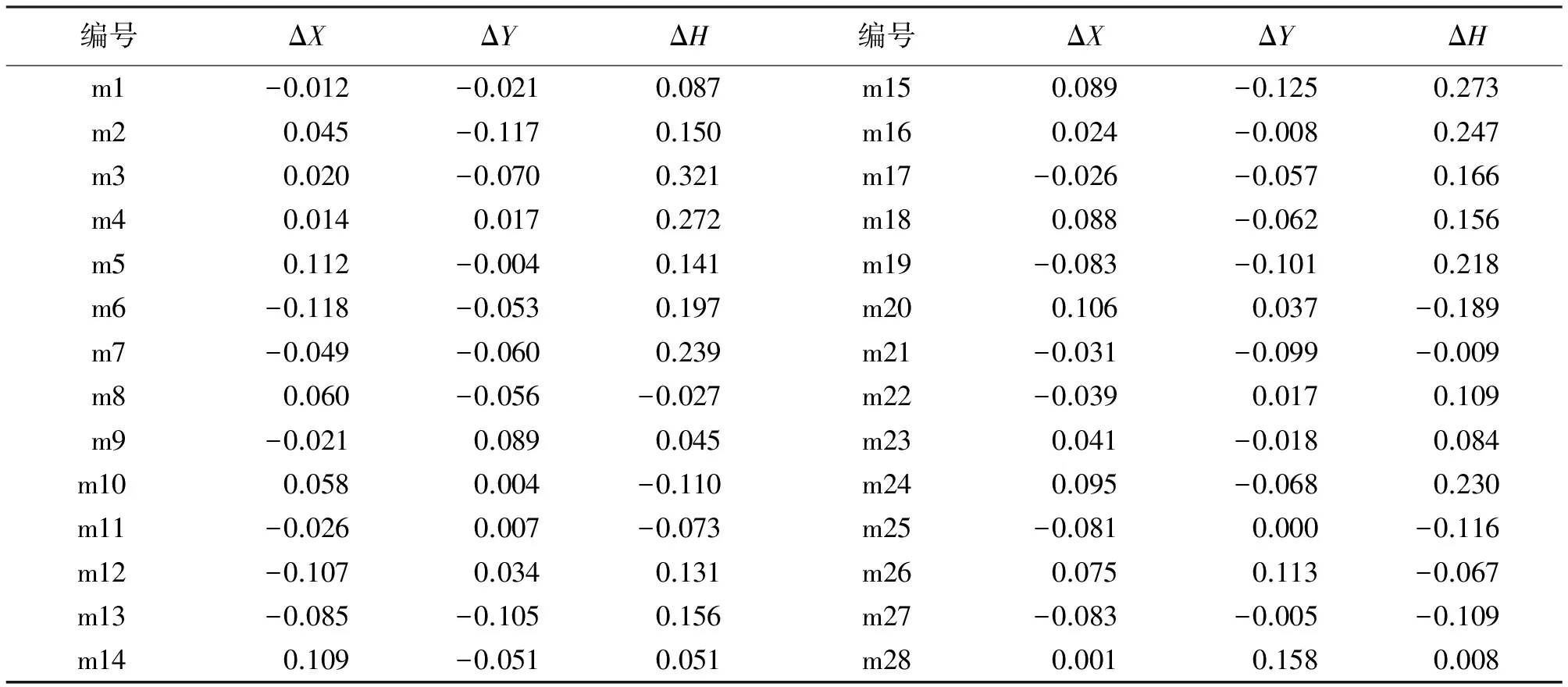
表2 检核点实测坐标与图上坐标差 m
[1] 狄桂栓,沈彪群,高波,等. 免像控无人机航摄系统在公路带状地形测量中的应用与精度分析[J].测绘通报,2017(2):159-160.
[2] 杨尧兰. 天狼星无人机摄影测量系统在大比例尺成图中的应用研究[D].昆明:昆明理工大学,2016.
[3] 曹明兰,薄志毅,李亚东. 无控制点数据的无人机影像DOM快速制作[J].测绘通报,2016(8):35-38.
[4] 张先起,李亚敏.基于生态的城镇河道整治与环境修复方案研究[J].人民黄河,2013,35(2):36-38.
[5] 张立先,河道整治存在问题与解决方法[J].黑龙江水利科技,2014(11):169-170.
ApplicationoftheSiriusNon-GCPsUAVinRiverRegulation
LIU Jianliang1,YANG Qi1,YANG Jun2
(1. Beijing U-View Technology Co. Ltd,Beijing 101102,China; 2. Jinchang City of Urban and Rural planning Institute,Jinchang 737100,China)
As to the problem that the river band complex terrain conditions and measurement of high precision requirement, the paper puts forward the method of Sirius UAV aerial mapping system for topographic mapping. According to this method, Sirius unmanned aerial system using its built-in 100 Hz real-time dynamic RTK technology and high precision of inertial navigation system IMU, can solve the problem of photo matching in the image data, without layout control points as the case to obtain high precision, greatly improving the efficiency of aerial survey. At the same time, the earthwork calculation and flood analysis in the process of river regulation will become more accurate and intuitive, which provides accurate data support for the subsequent comprehensive river regulation work.
UAV; non-GCPs; river; data process
刘建良(1992—),男,助理工程师,主要从事无人机航测数据采集与处理分析。E-mail:cl_ljl0312@163.com
