基于分段插值的水上无人机离水特性求解方法
2018-01-05李陟马东立杨穆清郭阳胡浩德
李陟,马东立,杨穆清,郭阳,胡浩德
北京航空航天大学 航空科学与工程学院,北京 100083
基于分段插值的水上无人机离水特性求解方法
李陟*,马东立,杨穆清,郭阳,胡浩德
北京航空航天大学 航空科学与工程学院,北京 100083
水上无人机成为无人机研究的新热点,其船体构型对离水特性影响巨大,构型参数设计合理可以减小滑跑距离和需用功率,反之会造成离水困难,甚至可能出现增加发动机功率水上飞机也无法离水的情况。这是由于其特殊的起降环境使得水上无人机起飞过程受力情况较常规飞行器更加复杂,常规飞行器起飞性能计算方法对于水上无人机不再适用,所以对水上飞机起飞离水特性的求解十分重要。CFD的发展使得利用数值计算方法代替常规的试验手段成为了可能,但直接利用CFD软件仿真求解水上无人机/飞机的离水过程难度大,耗时长,可行性低。可根据CFD计算中库朗数条件对气动力和水动力求解要求的不同,采用解耦方法分别求解不同条件下水上无人机完整构型的气动力和船体构型的水动力;同时水上无人机在起飞滑跑过程中,垂向受力小、加速度小,可将垂向受力看做近平衡状态,这成为分段插值求解方法的基础。将离水起飞过程离散化,利用分段插值方法求解得到其起飞离水特性,计算结果可以很好体现水上无人机水面滑跑的特性,与试验结果吻合良好。
水上无人机;离水特性;分段插值方法;近平衡假设;解耦计算
水上飞机具备在水面进行起飞、降落或停留的能力。其主要功能包括通勤、观光、执行侦察监视等任务[1-2]。水上飞机在第一次及第二次世界大战中发展较快,因特殊的起降环境使其布局、构型与常规固定翼飞机产生了较大区别[3-6]。如水上飞机为满足水面静泊稳定性要求,通常采用船身式机身;同时为兼顾高速滑跑能力,一般采用高速滑行艇的V型船底构型,以减小滑跑水动阻力;并增加多道断阶,减小达到起飞速度时水的吸力,确保水上飞机能离水起飞,其起降过程涉及空气动力学、水动力学、飞行力学,较常规飞行器的起降过程更为复杂,具有非定常高速两相流、地面效应等特殊问题[7-9]。
同时水上飞机的船体构型对其离水特性影响巨大,合理的构型参数可以有效减小滑跑距离和需用功率,反之会造成起飞离水困难,甚至可能出现加大发动机功率水上飞机也无法离水的情况,所以对水上飞机离水特性的求解十分重要。传统研究水上飞机离水特性的方法主要是通过试验得到水上飞机的气动力、水动力特性,再通过计算求得离水特性;或者制造小型缩比样机,通过模型自由飞的方式来实测模型离水特性,再根据相似性原则进行换算。试验研究投入人力物力巨大,研究周期较长,适合用于大型水上无人机(UAV)型号研制中[4-5,10]。
近年来,无人机的迅猛发展也为水上飞机的发展提供了新的方向与动力,小型的水上无人机成为各国无人机研制的一个新热点[10]。一般情况下,具有同等性能指标的水上无人机较普通水上飞机几何尺寸更小、质量更轻;同时在机体结构、动力装置等方面有较大进步,使得水上无人机具有更大的推重比,可以减小起飞距离,更适合在河道、水库等相对狭小的水域使用,这也凸显了水上无人机离水特性研究的重要性。但目前无人机的研发投入相对较小,研发迭代周期短,使得试验方法不适用。而现在日趋成熟的CFD软件已经具备精确求解复杂非定常两相流的能力[11-15],这就为通过数值计算方法研究水上无人机离水特性创造了可能,而对于常规水上飞机,数值计算方法的结果也能与试验结果相互对照。
水上飞机的离水过程涉及空气动力学、水动力学及飞行力学,其空气动力学问题的计算方法与普通飞行器一致,但水上飞机起飞过程中存在地面效应,对气动力影响较大,在计算时需予以考虑。Yang和Ma[16]利用动网格技术分析了舰载无人机的地面效应,给出地面效应与相对高度的关系,并对舰载无人机在航母上的起降过程进行动态模拟。
水上飞机水动力的计算可以参考船舶领域的相关方法。倪崇本[17]利用CFD技术对高速航行的船舶阻力性能进行研究,将兴波非线性、流体黏性、船体自身运动等诸多因素纳入计算考虑范围。但水上飞机的水动力也有自身特殊之处,例如在离水起飞过程中水上飞机的水线是在不断下降的,水动力总体趋势为减小趋近于零;而船舶在航行中水线和受力基本不变或者做周期性变化,这就使得水上飞机的水动力需要求解的状态更多,工作量更大。上官纯飞[18]对水上飞机起飞过程中水动力性能进行数值模拟分析和验证,其着重分析了不同速度及工况下水上飞机的升沉、转角和阻力等性能,并简要分析了模型作直航运动时的流场特性。
而水上飞机离水特性的相关研究较少。邱良骏[19]对某型大型水上飞机的离水特性进行了研究,其在时域上将水上飞机起飞离水的过程划分成不同时间步,计算水上飞机每一时间步初始的空气动力学特性与水动力学特性,并作为输入代入飞行力学方程进行求解,得到本时间步末的输出,随后作为输入代入下一时间步,直到到达起飞条件。通过对各时间步计算结果进行积分,得到水上飞机的离水特性。
本文基于库朗数条件,采用将水上无人机的气动力和水动力分开求解的解耦算法。气动力计算部分采用有限体积法离散求解定常雷诺平均 Navier-Stokes(RANS)方程,并考虑地面效应的影响。水动力计算部分则利用VOF(Volume Of Fluid)模型,离散求解非定常雷诺平均 Navier-Stokes方程。根据水上无人机起飞离水过程中垂向的近平衡假设,在空间维度上将起飞过程离散为不同特征段,对不同特征段的水动力进行插值计算,并对得到的加速度、速度、位移等信息进行差分,从而拟合离水过程,并抽取拟合曲线上的非拟合点进行验证。在此基础上提出基于分段插值的水上无人机离水特性求解方法。
1 数值计算方法
1.1 水上无人机阻力特性与离水过程
水上无人机主要起降场地包括湖面、江面、海面等,在给定推力、重量和升力特性的情况下,离水特性主要受阻力特性的影响。在起飞过程中水上无人机所受阻力根据流体属性可分为气动阻力和水动阻力,其中气动阻力组成较为简单,其随速度增加而增加。而水动阻力的组成则较为复杂,借鉴高速船舶的弗劳德阻力理论[20],水上无人机的水动阻力分为摩擦阻力Df,黏压阻力Dvp与兴波阻力Dw,如图1所示。其中摩擦阻力与黏压阻力是由于流体黏性产生的,统称黏性阻力Dv。对于给定船型,其黏性阻力系数仅与雷诺数有关,当雷诺数相同时,两形状相似物体的黏性阻力系数相等,即
图1 阻力的组成
Fig.1 Drag components
Cv=f(Re)
(1)
船体的摩擦阻力研究历史长,目前应用较多的是ITTC-57公式:
(2)
而在一定船型条件下黏压阻力系数与摩擦阻力系数成正比,即
Cvp=kCf
(3)
式中:k为该船型的形状系数。
兴波阻力是水上无人机在水面滑跑时,因船体周围压力分布变化引起的重力波所带来的阻力,本质不是水的黏性作用,而是重力因素所产生的。对于给定船型,兴波阻力系数为弗劳德数的函数,即
Cw=f(Fr)
(4)

所以整个水动阻力系数是雷诺数与弗劳德数的函数,即
Ch=Cf+Cvp+Cw=f(Re,Fr)
(5)
水上无人机起飞过程中气动阻力随速度增加而增加,变化规律明确,而水动阻力与船型、速度、浸润面积诸多因素相关,规律较为复杂,也是研究水上无人机离水特性所需要分析的主要对象,根据水上无人机状态,在平静水面滑跑离水起飞大致可分为3个阶段[10]。
第1阶段为排水航行阶段,此时水上无人机的重力主要通过浮力来平衡,运动状态类似于普通船只。水动阻力随速度增加而增加,其中摩擦阻力大约占总阻力的70%,黏压阻力占10%,兴波阻力占20%。此阶段速度一般在0.2VTO(起飞离水速度)左右。
第2阶段为滑行阶段,特征为水动阻力出现峰值,即阻力突峰。此时由排水航行阶段过渡到滑行阶段。本阶段开始船体水阶处向后体产生空气垫,后体水动作用力减小,纵倾角增加,带来了兴波阻力迅速增加,船体的水动升力和气动升力也增加,使得水线逐渐下降,黏性阻力开始下降,总阻力呈先上升后下降的趋势。此阶段速度一般在0.2VTO~0.5VTO左右。
第3阶段为起飞阶段,此时速度的增加进一步扩大了后体空气垫的面积,逐渐进入单平面滑行阶段,水线下降,浮力进一步减小,主要由前体的水动升力和气动升力平衡重力。黏性阻力进一步下降,兴波阻力占75%以上。当气动升力继续增加到足够平衡重力,此时速度到达VTO,浸润面积减小到0,水上无人机离水起飞。
1.2 离水过程分段插值方法
水上无人机在平静水面起飞过程中,航向受力包括螺旋桨拉力、气动阻力、水动阻力;纵向包括气动升力、水动升力、重力、浮力。可见水上无人机离水过程涉及空气动力学、水动力学及飞行力学,是多学科耦合过程。目前商用CFD软件对空气动力学、水动力学的仿真计算已经比较成熟,在航空航天、船舶、海洋工程等领域均有大量应用,为水上无人机起飞过程的研究提供了有效工具,理论上可利用CFD工具直接计算水上无人机全机构型的气动、水动混合流场,再利用CFD仿真软件内置的刚体六自由度方程模块对水上无人机离水过程进行动态仿真。
但目前CFD软件对于空气动力和水动力求解的网格数量、附面层第1层网格厚度、求解方法等要求是不同的[21]。对于水上无人机空气动力的求解一般采用定常求解方法;网格数量通常需要达到1 000万的级别;而为了更加精确求解阻力,附面层第1层网格尺寸较小,通常为0.1~0.01 mm(根据不同湍流模型对y+值的要求可变化)。而水动力求解则不同,首先VOF模型求解两相流为非定常求解方法,若也采用1 000万级别的网格数量,0.1~0.01 mm的附面层网格尺寸,根据库朗数(Courant Number)条件,必须相应设置更短的仿真计算时间步长,使得整体仿真求解时间长,计算效率低。故在船舶设计领域水动力求解网格数量通常取100万级别,网格最小尺寸取1 mm,即可保证求解精度。若利用CFD软件内置的刚体六自由度方程模块对水上无人机离水过程进行动态仿真,则需要使用动网格技术;这就需要在每个计算时间步内迭代更多次数,同样也会大大增加计算时间。同时在水上无人机起飞过程中,除第3阶段外,空气阻力均为小量,不足总阻力的5%,所以水动阻力的求解精度高低对总阻力影响更大。故直接计算水上无人机全机构型的气动、水动混合流场,并进行离水动态仿真难度高,耗时长,效率低,可行性低,不适用于水上无人机的设计阶段。
因此,为了平衡计算精度和效率,本文采用了空气动力和水动力分开求解的解耦算法,即空气动力使用全机构型计算,水动力使用船体构型计算。同时假设水上无人机在起飞离水过程中保持一定迎角,不考虑俯仰运动,其尾翼保持足够的平衡全机力矩。
假设水上无人机起飞速度为20 m/s,起飞总质量为30 kg,静推力为100 N,水面静泊时水线高度为0.12 m。假设推力不随速度变化,不考虑阻力,起飞过程中航向和垂向的分解运动均为匀加速直线运动。
(6)
式中:FT为静推力;m为起飞总重;t为起飞时间;h为水线高度;Fv为水上无人机垂向所受合力;av为垂向加速度。代入数值可得
(7)
由估算结果可见在理想情况下,垂向加速度很小,所受合力相较重力是一个小量,仅为重力的0.067 9%。而在实际起飞离水过程中,阻力随速度V增加而增加,推力FT随速度V增加而减小,这会令起飞时间t大大增加,从而使得起飞离水过程中实际的垂向加速度较估算更小。这样可以考虑将水上无人机离水过程中垂向受力情况当作近平衡状态考虑:即在任意时刻,水上无人机垂向合力近似为0,不考虑垂向运动。航向及垂向受力方程为
La(V)+Lh(V,h)-mg≈0
(8)
式中:La为气动升力;Lh为水动升力;Da为气动阻力;Dh为水动阻力。水动升力Lh为速度V和水线高度h的函数。在给定速度V的情况下,均有一个特定的水线高度h使得水上无人机满足垂向近平衡条件,所以在起飞离水过程中水线高度h成为速度V的函数,即
h=f(V)
(9)
在已知起飞速度VTO及初始水线高度h0的情况下,可以将起飞离水过程离散为n个阶段,其中阶段i的初始速度为Vi-1,结束速度为Vi,根据前述关系可以求得该阶段水线高度hi-1、hi,滑跑时间ti,滑跑距离Si等信息,整个起飞时间及距离可表示为
(10)
每个阶段结束时的速度等状态量为下个阶段的初始值,每个阶段内部的状态量可以通过初值与终值的内插值来估计。可将插值结果代入式(8)来判断是否满足垂向近平衡条件,若满足则说明该阶段初值、终值选取合理;不满足则将重新计算插值点的状态量,作为新阶段的初始值。分段插值计算方法属于并行计算方法,流程图如图2所示。
图2 分段插值方法计算流程
Fig.2Calculation procedure of piecewise interpolation method
1.3 VOF模型
对水上无人机在水面上运动的仿真涉及空气和水两种介质,求解需要应用VOF模型[22-23],其是一种在固定的欧拉网格下的表面跟踪方法。当需要得到两种或多种互不相融流体间的交界面时,可以采用这种模型。在VOF模型中,不同的流体共用一套动量方程,计算时在全流场的每个计算单元内都将各流体所占有的体积分数(Volume Fraction)作为未知数进行求解,而每个计算单元内体积分数之和封闭。
针对本文的空气和水两种介质,低速不可压流体的连续性方程为
(11)
式中:V为速度矢量。
假设在一个计算单元内水相的体积分数为αw,则气相的体积分数相应为αa=1-αw,即体积分数和封闭:
∑αa+αw=1
(12)
流场中不同区域的流体密度不同,在空气和水混合的计算单元内,密度为
ρ=αaρa+αwρw
(13)
在引入体积分数后,跟踪水相及气相的界面是通过求解不同相的体积分数的连续性方程(Volume Fraction Equation)实现的,对于水相有
(14)
默认情形,方程右端的源项为零。随后求解计算单元内单一的动量方程,空气相与水相共同获得作为结果的速度场,即
(15)
式中:ν为黏性系数;g为重力加速度矢量;p为压力;F为体积力矢量。这样可求得任意水-气两相交界面的稳态或瞬时形态。本文采用商用CFD软件Fluent中的VOF模型进行多相流仿真计算。
2 水上无人机计算模型及网格生成
2.1 计算模型与坐标系
水上无人机为满足水上起飞要求,除采用船身式机身外,通常翼尖需安装浮筒,以提高滑跑时的横向稳定性;增加水舵,提高低速时航向操纵能力。本文针对水上无人机离水特性的研究,纵向特性是研究重点,计算流体动力时可对水上无人机模型进行局部简化。根据前述求解策略,计算空气动力时,去掉翼尖浮筒和水舵等对纵向性能影响较小的部件[8];计算水动力时,则只保留船身,这样有利于简化网格,节约计算时间。参考坐标系位于样机对称面的重心位置,机尾方向为X轴正方向,向右为Y轴正方向,向上为Z轴正方向,最后使用的计算用模型如图3所示。
图3 水上无人机外形示意图
Fig.3 Schematic of sea-UAV shape
2.2 网格生成
采用结构网格对水上无人机模型进行划分。其中气动力计算模型采用完整构型,网格数量为600万,附面层第1层网格高度为0.1 mm;水动力计算时对模型进行了简化,去掉了对水动力影响较小的机翼、尾翼等部件,网格数量为86万,附面层第1层网格高度为1 mm。气动力及水动力计算网格如图4所示(半模对称)。
图4 水上无人机完整构型及船体表面网格分布
Fig.4 Surface grid distribution of sea-UAV and hull
3 计算结果及分析
3.1 地面效应下空气动力计算结果
L,D,M=f(V,h)
(16)
式中:L为升力;D为阻力;M为力矩。
在保持迎角α=2.5°的姿态情况下,根据地效气动数据,起飞离水速度为VTO=19 m/s。

表1 地面效应计算结果Table 1 Ground effect calculation results
3.2 水上无人机离水特性
根据前述空气动力、水动力解耦计算方法,利用VOF模型求解不同弗劳德数下水面波形结果,如图5所示。
可见随着速度的增加,船艏与船艉波系波高同时增加,船艏、船艉两个波系夹角也变得更小。这些现象符合船舶水动力学的波形变化趋势[10,20]。
图6为起飞离水过程中水上无人机航向受力关于弗劳德数的曲线,包括推力、空气阻力、水动阻力等。同时根据弗劳德阻力理论将水动阻力中的兴波阻力、摩擦阻力的曲线也显示在图中。图7则为水上无人机的垂向受力曲线,包括浮力、水动升力、气动升力等。
由图6可见,水上无人机的水动阻力曲线存在一个明显的突峰,阻力突峰的存在与前述水上飞机起飞过程的定性描述相符,该处的弗劳德数约为Fr=1,对应速度V=5 m/s=0.25VTO,此速度为水上无人机的“隆起速度”。
在“隆起速度”之前,即水上起飞的初始阶段,水动升力为负值(如图7所示),而此时增加的气动升力不足以平衡水动负升力,故水上无人机水线上升(如图8所示),通过增加浮力的方式平衡垂向受力;同时随着浮力、排水量的增加,阻力也快速增加。该阶段初期,黏性阻力仍然为水动阻力主要部分,与前述定性结论比较吻合,随着速度的增加,兴波阻力的增速快于黏性阻力,兴波阻力占总阻力的比重也迅速变大。
图5 不同弗劳德数下波形图
Fig.5 Wave patterns with different Fr number
图6 航向受力曲线
Fig.6 Curves of forces in head direction
图7 垂向受力曲线
Fig.7 Curves of forces in vertical direction
而在达到“隆起速度”后,水上无人机进入滑行阶段,此时水动升力迅速增加,与相应增加的气动升力共同平衡重力,这样水线开始快速下降(如图 8所示),浮力减小;水动阻力,特别是兴波阻力开始快速下降,这个下降速度高于空气阻力上升的速度,这样总阻力下降,水上无人机越过阻力突峰后开始更快地加速,此时对应弗劳德数约为Fr=1.75,对应速度V=9.2 m/s=0.48VTO。
随后水上无人机进入起飞阶段,此时水动升力达到最大值,船体进入单滑行面滑水状态,浮力继续减小,气动升力迅速增加,水线下降的速度也减小(如图 8所示),水动阻力下降速度也相应减小,直到到达起飞速度VTO,此时弗劳德数Fr=3.6,对应速度V=19 m/s。
图8 水线位置曲线
Fig.8 Curves of waterline position
图9 力矩特性曲线
Fig.9 Curves of moment characteristics
图9为分段插值求解起飞离水过程时得到的水上无人机关于其重心的力矩特性曲线,水动力矩与水动阻力类似,存在一个突峰。对于全机,力矩特性一直表现为抬头力矩,可见水动力的压力中心位于重心前,即前体部位。
经过分段插值法计算,本文研究的水上无人机起飞离水滑跑时间t=15.60 s,滑跑距离S=133 m。
3.3 分段插值方法的验证
利用前述数值验证方法,对分段插值法求解得到的曲线进行验证,选取V1=1.5 m/s与V2=11 m/s两个点进行插值验证,对应水线高度h1=118.05 mm、h2=22.60 mm,验证结果如表2和表3所示。
由插值结果可见,选取样点关于水动升力的插值精度较高,误差小于1%,而阻力的误差更大,这有两方面原因:首先水动阻力组成较为复杂,在弗劳德数较大的情况下,往往还存在液体的飞溅等造成的特殊阻力,CFD软件往往不能很好地模拟此类现象,造成阻力误差大;同时插值结果对拟合曲线在插值段线性度要求较高,V1=1.5 m/s的插值曲线线性度较差,故而造成了阻力插值误差较V2=11 m/s更大。但总体而言,升力误差与重力相比、阻力误差与推力相比均为小量,小于或接近1%,对计算结果影响较小,在水上无人机的设计初期对离水特性的估算是可以接受的。
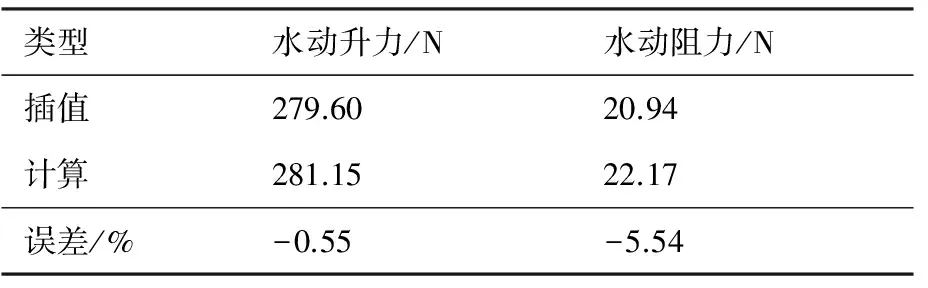
表2 分段插值法数值验证(V=1.5 m/s)

表3 分段插值法数值验证(V=11 m/s)
在完成水上无人机的设计与制造后,通过外场试验获取了起飞离水特性的相关数据,如图10所示。试验结果与分段插值结果对比如表4所示。速度关于时间的曲线对比如图11所示。
分段插值所计算的滑跑距离和起飞离水时间均较试验值偏大,但误差均在6%之内,通过速度曲线的对比,可见在高速时,计算速度小于试验速度,这可能是水上无人机实际滑跑时采用的操纵策略与分段插值不同造成的。在数值计算时将水上无人机迎角固定,假设无俯仰运动;而实际滑跑时,为了更快离水,水上无人机一般为推杆状态,这样可使后体更快脱离水面,减小阻力,从而造成了计算与试验结果不一致,故可在后续工作中加入水上无人机俯仰运动的修正,以求更加精确地求解离水过程。
图10 水上无人机滑跑、起飞及飞行轨迹
Fig.10 Sea-UAV taking off, flying and flight path

类型时间/s滑跑距离/m试验15.10126.0计算15.60133.0误差/%-3.21-5.55
图11 分段插值与试验起飞速度曲线
Fig.11Taking off velocity curves of piecewise interpolation and experiment
4 结 论
本文基于VOF模型,采用解耦方法对水上无人机的气动力与水动力进行了数值模拟,根据垂向近平衡状态假设,利用分段插值方法对水上无人机的起飞离水特性进行了计算,对计算结果进行了数值及试验验证。
1) 水上无人机在起飞滑跑过程中,垂向位移加速度较小,可将垂向看成近平衡状态。
2) CFD计算中,库朗数条件对气动力和水动力求解要求有较大区别,使得直接求解完整构型的耦合流场难度大、费时费力;采用解耦方法分别求解,计算精度可以满足,同时降低了求解难度,提高了计算效率,使得数值计算水上无人机离水特性成为可能。
3) 分段插值法求得的水上无人机的阻力特性与常规飞行器起飞阶段阻力一直增大不同,其阻力曲线存在突峰,阻力呈先大后小的特点;水上无人机若能越过阻力突峰,通常都能顺利起飞。
4) 分段插值法求解获得的水上无人机的动力学特性能很好地解释其起飞滑跑的运动特性,为水上无人机及水上飞机设计初期离水特性估算、发动机的选配等提供参考。
5) 分段插值法为并行计算方法,较常规对运动过程进行积分计算的串行计算方法效率更高,计算结果与试验结果吻合良好,误差在6%之内。
[1] JASON W, GILBERT L. Preliminary design optimization of an amphibious aircraft[C]∥Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, 2012: 3613-3668.
[2] JOHNSON E R. American flying boats and amphibious aircraft: An illustrated history[M]. Jefferson, North Carolina: McFarland & Company Inc. Publishers, 2009: 213-228.
[3] WILLIAM N. Seaplane design[M]. London: Mcgraw-Hill Book Company Inc., 1934: 75-111.
[4] CARTER A W. Research on high length-beam ratio hulls[J]. Journal of the Aeronautical Sciences, 1949, 17(3): 167-183.
[5] HERRMANN H. Seaplane floats and hulls[R]. Washington, D.C.: NACA, 1927.
[6] HUGLI W C, AXT W C. Hydrodynamic investigation of a series of hull models suitable for small flying boats and amphibians: NACA-TN-2503[R]. Washington, D.C.: NACA, 1951.
[7] PAOLA C P, DANIELE D, FRANCO M. Preliminary design of an amphibious aircraft by the multidisciplinary design optimization approach[C]∥48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Reston, VA: AIAA, 2007: 1075-1105.
[8] FREDIANI A, CIPOLLA V, OLIVIERO F. Design of a prototype of light amphibious prandtlplane[C]∥56th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Reston, VA: AIAA, 2015: 176-187.
[9] MAYANK V B, RAJKUMAR S, SCOTT E. Conceptual design and sizing of an amphibian transport aircraft [C]∥2013 Aviation Technology, Integration, and Operations Conference, 2013: 2177-2185.
[10] 褚林塘. 水上飞机水动力设计[M]. 北京: 航空工业出版社, 2014: 179-222.
CHU L T. Hydrodynamic design of seaplane[M]. Beijing: Aviation Industry Press, 2014: 179-222 (in Chinese).
[11] YANG X, WANG T, LIANG J, et al. Survey on the novel hybrid aquatic-aerial amphibious aircraft: Aquatic unmanned aerial vehicle (Aqua UAV)[J]. Progress in Aerospace Sciences, 2015, 74: 131-151.
[12] HESS J L, SMITH A M O. Calculation of potential flow about arbitrary bodies[J]. Progress in Aeronautics Sciences, 1967, 8(8): 138-149.
[13] MELTON J E, BERGER M J, AFTOSMIS M J. 3D application of a cartesian grid euler method[C]∥33rd Aerospace Sciences Meeting and Exhibit. Reston, VA:AIAA,1995.
[14] CLARENCE O E B, KIDAMBI S, DANIEL G H, et al. Unstructured nonlinear free surface flow solutions: Validation and verification[C]∥32nd Fluid Dynamic Conference and Exhibit. Reston, VA: AIAA, 2002.
[15] BEDDHU M, JIANG M Y, TAYLOR L K, et al. Computation of steady and unsteady flows with a free surface around the wigley hull[J]. Applied Mathematics and Computation, 1998, 89(1-3): 67-84
[16] YANG M Q, MA D L. Asymmetric ground effects of a tailless unmanned aerial vehicle model[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2014, 14(28): 2652-2661.
[17] 倪崇本. 基于 CFD 的船舶阻力性能综合研究[D]. 上海: 上海交通大学, 2011: 51-88.
NI C B. A comprehensive investigation of ship resistance prediction based on CFD theory[D]. Shanghai: Shanghai Jiao Tong University, 2011: 51-88 (in Chinese).
[18] 上官纯飞. 某型水上飞机水动力性能数值验证研究[D].武汉: 华中科技大学, 2012: 23-50.
SHANGGUAN C F. Numerical validation of hydrodynamic performance on a seaplane[D]. Wuhan: Huazhong University of Science and Technology, 2012: 23-50(in Chinese).
[19] 邱良骏. 两栖飞机综合气动性能优化设计[D]. 上海: 上海交通大学, 2013: 27-50.
QIU L J. Integrated aerodynamic and hydrodynamic optimization of amphibious aircraft[D]. Shanghai: Shanghai Jiao Tong University, 2013: 27-50 (in Chinese).
[20] 卢晓平. 舰船原理[M]. 北京: 国防工业出版社, 2009: 103-130.
LU X P. Theory of ships[M]. Beijing: Defense Industry Press, 2009: 103-130(in Chinese).
[21] ANDERSON J D. Computational fluid dynamics[M]. New York: Mcgraw-Hill Book Company Inc., 1995: 78-90.
[22] PARK I R, KIM K S, KIM J A. Volume of fluid method for incompressible free surface flows[J]. International Journal for Numerical Method in Fluids, 2009, 61(12): 1331-1362.
[23] BEDDHU M, JIANG M Y, WHITFIELD D L, et al. CFD validation of the free surface flow around DTMB model 5415 using Reynolds averaged Navier-Stokes equations[C]∥Proceedings of the Third Osaka Colloquiumon Advanced CFD Applications to Ship Flow and Hull Form Design,1998.
Piecewiseinterpolationmethodforcalculatingsea-UAV’stakeoffperformance
LIZhi*,MADongli,YANGMuqing,GUOYang,HUHaode
SchoolofAeronauticScienceandEngineering,BeihangUniversity,Beijing100083,China
Thesea-UAVhasbecomeahotspotofUAVresearchrecently.Sea-UAV’shullisakeyfactorforthetakeoffprocedure.Thewell-designedhullcanreduceenginepowerandtakeoffdistance;otherwise,theUAVwouldhardlytakeoff,andenginepowerwouldevenincrease.Becausethesea-UAVhasamorecomplexforceconditionduetotheparticulartakeoffenvironment,thetakeoffperformanceanalysismethodappliedtoconventionalaircraftisnolongeravailableforthesea-UAV.Therefore,itisimportanttoanalyzethetakeoffperformanceofthesea-UAV.ThedevelopmentofCFDmakesitpossibletousenumericalcalculationmethodtoreplacetheexperimentalmethod,butitisnotrealizabletopredictthemultiphaseperformanceofthesea-UAVbyusingCFDdirectlyforitistimeconsumingandhasenormousamountofcalculation.Inthispaper,adecoupledcalculationmethodisdevelopedtopredicttheaerodynamicandhydrodynamicforcesseparatedbasedonthedifferentdemandsofCourantnumber.Meanwhile,theforceintheverticaldirectionisassumedtobenearbalancedduetoquitesmallresultantforceandaccelerationinthisdirectionduringtakeoff.Basedonthisassumption,thediscretetakeoffprocedureiscalculatedbythepiecewiseinterpolationmethod.Theresultscanexplainsea-UAV’stakeoffcharacteristics,andmatchtheexperimentaldatawell.
sea-UAV;takeoffperformance;piecewiseinterpolationmethod;nearbalanceassumption;decoupledcalculation
2017-04-28;
2017-06-09;
2017-06-16;Publishedonline2017-06-191141
URL:http://hkxb.buaa.edu.cn/CN/html/20171207.html
.E-maillzevan@163.com
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
10.7527/S1000-6893.2017.121369
2017-04-28;退修日期2017-06-09;录用日期2017-06-16;网络出版时间2017-06-191141
http://hkxb.buaa.edu.cn/CN/html/20171207.html
.E-maillzevan@163.com
李陟,马东立,杨穆清,等.基于分段插值的水上无人机离水特性求解方法J. 航空学报,2017,38(12):121369.LIZ,MADL,YANGMQ,etal.PiecewiseInterpolationmethodforcalculatingsea-UAV’stakeoffperformanceJ.ActaAeronauticaetAstronauticaSinica,2017,38(12):121369.
V271.5
A
1000-6893(2017)12-121369-10
李明敏)
