车载三维移动立体影像采集系统的集成及应用
2018-01-04王岳文周良恩许立本
王岳文,周良恩,许立本
(宁波市阿拉图数字科技中心,浙江 宁波 315800)
车载三维移动立体影像采集系统的集成及应用
王岳文*,周良恩,许立本
(宁波市阿拉图数字科技中心,浙江 宁波 315800)
车载移动激光测量技术已成为当今测量研究的热点。本文介绍了车载三维立体影像采集系统的组成部分、工作原理和后期系统采集的点云数据的处理,通过实例论述了系统在数字竣工测量等方面的应用。
激光扫描;移动测量;三维立体重建
1 引 言
伴着激光技术的发展和成熟,激光扫描仪本身具有的很高的测量效率、精度的特点在工程测量中得到广泛应用,成了又一种获取三维空间信息的新的技术手段。在实际测量中,往往遇到的情况趋于多样、多变、复杂化。而且测量不同项目有不一样的要求,为了满足不同测量项目的需求,催生了不同类型、不同组合方式、不同搭载平台的激光扫描测量系统的诞生。按激光扫描测量系统搭载平台的不同,亦可分为机载、星载以及地面激光扫描测量系统等[1]。各种搭载平台各有优缺点,例如,机载或星载传感器来采集地面目标,由于距离和角度的问题无法准确地采集到近距离的景物的三维目标信息。为了解决这个问题,迫切的需要可移动的地面近景激光扫描系统,于是车载激光扫描系统成为现阶段热门的研究方向。
地面三维激光雷达(Terrestrial Laser Scanning,TLS)是20世纪90年代突破的一种快速获取三维空间信息的技术手段,广泛应用于测绘技术行业。它具有高精度、高效率、高分辨率等优点。因为融合了激光点云能真实反映目标的结构、形状、颜色,为测量目标的识别分析提供了更为丰富的研究内容[2]。因为其获取空间数据的快速、高精度特点符合了测绘发展的趋势,满足了空间信息获取和表达的需要,因此在众多工程应用领域显现出了技术上的优势,引发了新的技术革命。
随着科技的进步,获取三维空间信息的手段也呈现多样化,不同传感器搭载不同的平台,目的就是更好、更快、更准确地获取三维空间信息。现以高速地面三维激光雷达用作核心传感器,并以GPS和IMU进行激光扫描传感器定位定姿的移动测量系统已成为对地观测技术的补充[3]。它具有分辨率高、精度高、操作方便、灵活的观测时间、成图周期短、作业效率高、能进行连续和动态测量等一系列的优点[4]。实现了场景的快速三维重建和高精度三维测量;同时采用静动态相结合激光扫描测量方式,可实现密集城市中建筑竣工、地面管线测量、地形图测量等工作,进一步推动数字化城市的建设。
2 车载三维立体影像采集系统
2.1 车载三维立体影像采集系统的组成
车载三维立体影像采集系统是一个高集成度、高自动化的采集系统,利用多种不同型号传感器来实现对周边地物的三维空间信息的数据和实景数据的获取。其系统主要由全景图像采集模块、POS采集模块、激光扫描数据采集模块、系统控制模块等几个主要部分组成[5]。如图1所示:
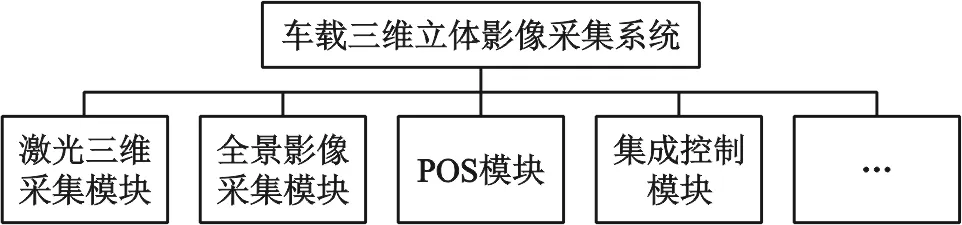
图1 车载三维立体影像采集系统的硬件组成
(1)激光扫描数据采集模块:配置两台激光扫描仪来分别获取车辆两边的地物点云数据(RIEGL VZ-400)及地面点云数据(LMS-Q120i)。
(2)全景图像采集模块:用于同步获取影像,提供丰富的场景纹理信息。全景影像采集系统由8个CCD相机构成。
(3)POS模块:主要组成部分分为全球定位系统(GPS)及惯性测量单元(IMU),为了获取扫描装置实时的空间姿态和空间位置。
(4)集成控制模块:用于在车载三维立体影像采集系统在采集数据中的系统内部同步交互与控制。
(5)数据存储、监视等系统:装配显示器用于监视车辆运行测量路线和内容,配备数据存储系统等必要设备。
通过对车载三维立体影像采集系统的调研,确定整个系统的配置(包括激光扫描仪、全景相机、POS系统、控制系统等型号及其随机软件),完成询价和相应采购任务,搭建系统。集成后的系统如图2所示。
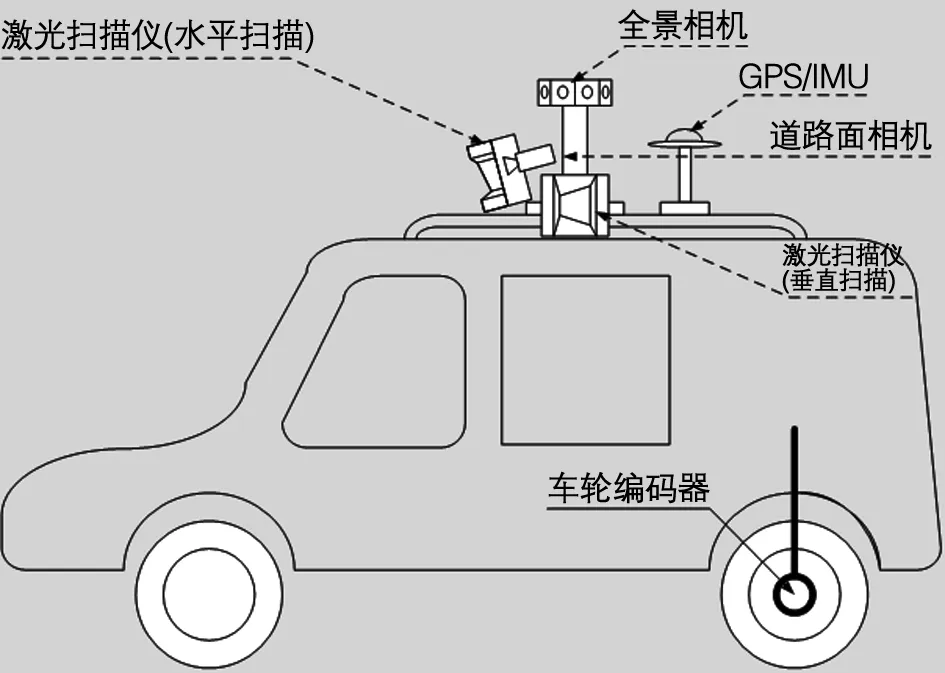
图2 车载三维立体影像采集系统的系统集成
为了实现城市和道路两侧的主要街道等3D场景的自动快速采集,车载三维数据采集系统需要集成各种传感器,包括:全球定位系统(GPS)、激光测距扫描仪(LS)、惯性测量单元(IMU)、CCD阵列数码相机、矢量、线阵CCD数码相机[6]。全球定位系统获得可靠的空间信息;惯性测量单元测量物体三轴姿态角(或角速率)以及加速度的信息;二维激光扫描仪获取周边地物的平面轮廓线;采集的数据经过降噪等工序与其他传感器获得的数据进行统一的计算、匹配,提取出地物明显的特征点、要素点,拟建出周边道路及街景的三维模型,然后通过相机获取的实景照片对三维模型的表面纹理进行纠正。
2.2 车载三维立体影像采集系统高精度标定
车载三维移动测量系统的IMU和GPS仅仅只获取了车辆行驶的轨迹及姿态数据,然后将该信息传递给激光扫描仪,大量的空间信息是通过多台的CCD相机组成的测量系统获得。然而,由于激光扫描仪的中心和惯导中心之间的不统一,同时IMU姿态,它不能准确地反映激光扫描仪的态度,因此有必要准确地校准激光扫描仪的6个参数,即3个平移参数(反应惯导中心与扫描仪中心位置关系)以及3个旋转参数(反应IMU姿态与激光扫描仪的姿态关系)[7]。想要实现三维车载激光扫描系统高精度的绝对标定,需要通过建立车载三维激光扫描系统的科学严谨的定位模型,并引入罗德里格矩阵到激光扫描仪的外参数解算中。此外,系统中由GPS、IMU、RIEGL VZ-400组成的三维激光扫描成像系统的外方位元素标定问题,而LMS-120i的标定方式与VZ-400等方法类似。
(1)全景相机的高精度标定。利用高精度的数据成像模型进行标定,获取正确的空间投影关系。建立360°控制场进行全景相机的高精度标定,借助全景大视野可观测完整的场景结构,充分利用物方已知的几何关系(如建筑物平行、垂直轮廓线),采用基于物方先验知识的标定算法。
(2)三维激光扫描仪的高精度标定。采用刚体变换法和基线比较法进行系统误差的检校,对于生成点云质量有影像的因素,进行集中、系统的综合分析和比对,建立科学的数字模型形成一套实用的地面三维激光雷达检校和标定方法,同时建立检校场。
(3)车载三维立体影像采集系统的联合标定。即点云与影像的高精度融合技术。车载三维立体影像采集系统的联合标定结果直接决定了采集系统外方位元素的精度和可靠性,也直接关系到后期数字产品的精度和可靠性。将点云数据按不同颜色赋值分类,便于我们实际操作时的辨别与分析。车载三维数据采集系统工作时采集周围地物及相关的影像数据与车载系统得到的空间坐标匹配,获得精确的实际空间位置及现场真实场景。
3 车载三维立体影像采集系统移动测量
3.1 GPS基站架设
解算的精度与车载GPS观测条件、车载IMU测量精度、GPS基站观测条件、GPS基站与车辆距离、GPS基站架设的已知点坐标精度等有关。作业前GPS基站以静态观测模式在车载POS数据开始采集之前提前几分钟开启,并于车载POS数据采集完毕后延迟几分钟关闭。
3.2 激光点云与全景影像数据采集
作业前对行进路线进行合理规划,检查各仪器设备的运转状况是否良好,车辆本身是否正常;提前了解卫星星历预报,防止GPS授时错误。车辆前去作业时,停止一段时间,以便POS系统进行初始化。在前往测区过程中,选择一条GPS观测条件较好的直线道路行驶一段时间。当车辆抵达扫描时,适当提前采集点云数据,并在合适的地方将工程数据进行适当分隔。最终的点云精度,受车辆行进过程中的GPS观测条件影响较大。在GPS失锁条件下,尽量不进行高精度的测量,在条件较差区域可利用周边观测条件较好的地方,每隔一段时间进行一次POS观测修正,使数据得到补偿。
在作业过程中,沿车辆行进方向上,当VZ-400向右侧扫描时,车辆尽量向左行驶;当VZ-400向左侧扫描时,车辆尽量向右侧行驶,扫描角度视现场环境及时调整,避免较大的缺漏和遮挡。
道路数字360°全景实景影像是以flash形式嵌入网页或地图网站,制作出街景影像视频,并与传统地图相结合,作为网站二维矢量地图、三维仿真地图和遥感卫星影像的补充,以作业人员视线的角度,将客观世界的最直观和最真实的影像呈现给社会公众。街景影像地图功能主要包括:向左旋转、向右旋转、仰视、俯视、近看、远看、自动播放以及全屏展示等。道路数字360°全景实景影像制作主要包括数据采集和数据处理两部分。
全景相机在固定频率对周边环境进行拍摄。进入测区拍摄前,需进行影像预览,调整影像色调和亮度,进行白平衡。数据采集需要综合考虑天气状况、道路交通拥挤状况、周边环境等因素,一般选择在天气晴朗时。采集的数据以*.pgr格式文件形式存储在计算机磁盘上。
在外业采集完毕后,仍需要将车辆停止一段时间,保证POS精度。对各项数据的完整性进行检查,及时下载数据并备份。重要设备在使用前进行固定安装,使用完成后及时取下,按时维护保养,防止日晒雨淋。
3.3 道路点云和全景影像数据预处理
3.3.1 激光点云定位定向
需要利用Waypoint软件对车载POS数据、GPS数据和IMU数据进行联合解算,获得车辆的空间位置。激光点云定位定向处理前,首先将车载GPS数据和IMU进行分离,将分离出来后的GPS数据进行定位解算。需要利用GPS的差分基本原理来解算定位,差分改正可以获取高精度结果。利用已知的精确坐标点上的建立地面站和卫星的星历进行比较,计算获得基准站与星间的距离改正数,还可以用GPS设备采集基准站的坐标,比较基准站已知坐标及观测坐标获得同一个点的位置改正数[8]。
在进行数据定位之后,根据计算获得的GPS天线坐标和激光扫描仪处的坐标信息。GPS天线偏心分量实测得到;IMU偏心分量和IMU与激光扫描仪相对位置取标定资料提供的值。将联合定位信息加入RiScan Pro软件系统进行处理,获得激光扫描仪车载模式的行迹文件,确定每一个激光点的坐标值,对整个点云文件进行定向。
3.3.2 全景影像数据处理
数字全景影像数据处理流程如图3所示:

图3 全景影像数据处理流程
3.4 基于点云的道路竣工图绘制
3.4.1 点云处理过程
采用City Scene点云综合处理软件对不同属性的地物进行区分抽稀后,结合CAD的可视化窗口分析判断点云的方法,如图4所示。

图4 点云处理流程
3.4.2 不同地物的矢量化绘制
(1)线状地物绘制
①对于进行抽稀过后的数据按不同高程区间的特征将其区分绘制,如图5、图6中栅栏的绘制。
图5 原始点云示例

图6 按高程分割后点云示例
②与周边地物有一定高程差异特征的线状地物根据高程特征直接绘制,如图7中道路边线的绘制。
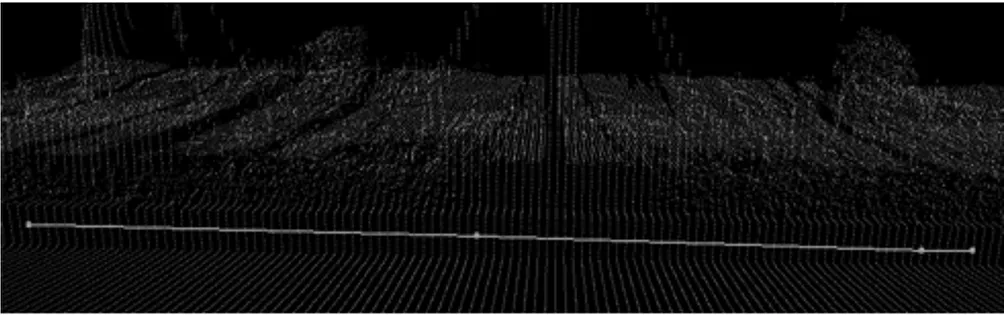
图7 道路边线绘制示例
③对于无明显高程差异的现状地物需要现场比对修正绘制。
(2)点状地物绘制
对于点状地物绘制,为了避免提取时的错误,利用高程差异的特点先将其分离。如果点阵列数超过4列的点状地物,需如图8、图9所示进行偏心绘制。

图8 点状地物(路灯)绘制示例
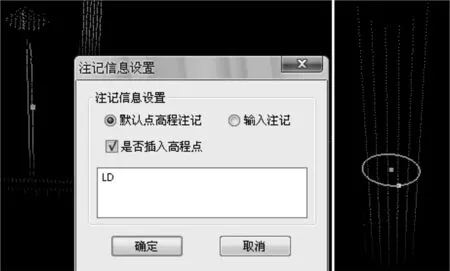
图9 点状地物(路灯)偏心绘制示例
(3)高程注记
首先点云直接按照高程裁切,然后高程注记可以提取裁切点进行注记,如图10所示。

图10 高程注记获取示例
(4)复杂区域地物绘制
如果现场地形地貌比较复杂,可以先提取复杂区域再进行投影,使用切面等方式绘制,绘制流程如图11~图13所示。
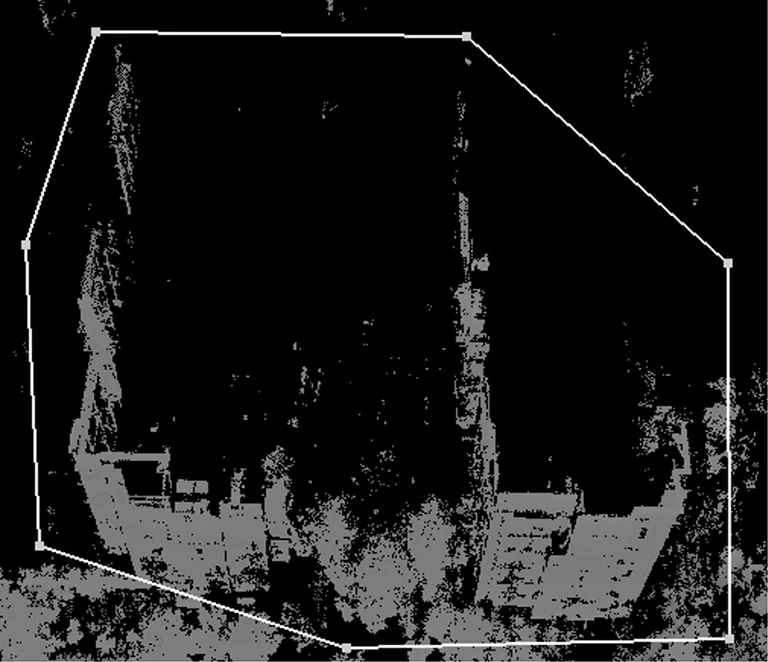
图11 原始点云
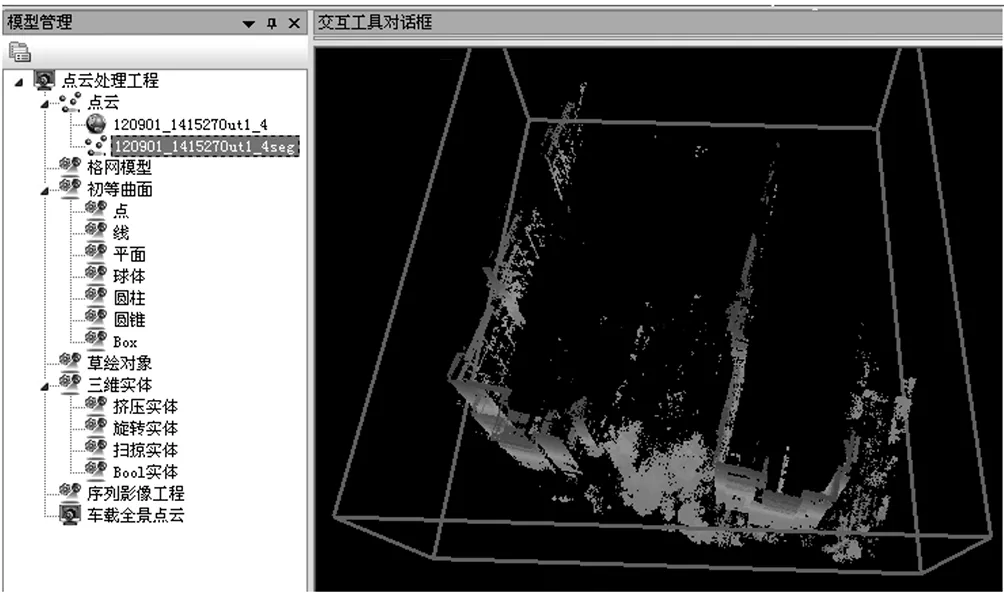
图12 分离后点云
图13 分离投影后点云
4 应 用
(1)地形测量。利用车载激光雷达技术实现三类地物,解决野外非居民地的大面积成图。采用静态方法解决二类地物与一类地物的测量工作,实现内业数据快速处理。
(2)道路竣工测量。利用车载激光雷达完成道路和桥梁的快速数据采集,保证数学精度的基础上生成高密度DEM,改进现有作业成果,减少人工测量工作,同时内业快速绘制数字线划图。
(3)利用静态激光雷达实现城市建筑物竣工测量,白模型的快速生成与高分辨率高精度纹理贴图,生成竣工成果所需要的数字线划图。拟利用车载激光雷达在城市建成区快速三维建模,实现建筑物与道路、桥梁白模型的快速生成与高分辨率高精度纹理贴图。实现半自动可视化建模和纹理的可量测性。
(4)地理部件采集。利用车载激光雷达快速采集道路两侧的市政部件和地理要素,实现路灯、窨井等部件的快速提取与分类,确定部件的坐标位置,为各类地理部件的快速更新服务。
5 总 结
随着社会经济的发展,城市建筑、环境的多样化、复杂化,一般的测量手段已无法满足测量要求,移动测量技术的发展趋于成熟,车载三维扫描系统的应用极大地提高了测量工作的时效性,又多了一种全新的获取空间信息的手段。充分了解车载三维系统的组成、工作原理及提高采集数据的精度能很好的应用于建筑、道路竣工以及三维仿真建模等项目中,对于解决城市重复测量、提高城市测量效率、快速实现城市竣工测量等工作都具有重要意义。
[1] 喻亮. 基于车载激光扫描数据的地物分类和快速建模技术研究[D]. 武汉:武汉大学,2014.
[2] 郑德华,雷伟刚. 地面三维激光影像扫描测量技术[J]. 铁路航测,2003(2):26~28.
[3] 陈为民,聂倩,林昀. 基于罗德里格矩阵的车载激光点云与全景影像配准研究[J]. 测绘通报,2013(11):24~27.
[4] 韩友美. 车载移动测量系统激光扫描仪和线阵相机的检校技术研究[D]. 青岛:山东科技大学,2016.
[5] 陈长青,朱元彪,吴盛才. 车载三维立体影像采集系统在城市道路竣工测量中的应用[J]. 黑龙江科技信息,2014(14):239~241.
[6] 陈允芳,叶泽田,张恒铁等. 多传感器组合的移动车载数据采集系统研究[J]. 传感器与微系统,2006(12):28~30.
[7] 聂倩,陈为民,陈长军. 车载三维激光扫描系统的外参数标定研究[J]. 测绘通报,2013(11):80~83.
[8] 吴清海,云先艳. RTK与全站仪联合测图[J]. 江西测绘,2007(1):25~27.
IntegrationandApplicationofThreeDimensionalMovingStereoImageAcquisitionSystem
Wang Yuewen,Zou Liangen,Xu Liben
(Ningbo City Aratos Digital Technology Center,Ningbo 315800,China)
Mobile laser measurement technology has become a hot spot in the field of measurement. In this paper,This paper introduces the components,working principle and processing of the point cloud data collected by the system,This paper discusses the application of the system in digital completion measurement.
laser scanning;mobile measurement;3D reconstruction
1672-8262(2017)06-90-05
P232
A
2017—03—01
王岳文(1982—),男,工程师,主要从事城市工程测量技术工作。