基于双多线激光雷达的低矮道边检测∗
2018-01-04石庭敏蔡云飞
石庭敏 蔡云飞 闫 明
(南京理工大学计算机科学与技术学院 南京 210094)
基于双多线激光雷达的低矮道边检测∗
石庭敏 蔡云飞 闫 明
(南京理工大学计算机科学与技术学院 南京 210094)
低矮道边检测是无人驾驶汽车环境感知的重要课题,其感知的效果直接影响着自动驾驶的性能。针对城市低矮道边检测问题提出了一种新的基于双多线激光雷达的道边检测与提取方法。方法首先通过梯度一致性特征将原始雷达点云分成路面点与障碍物点两类;其次,利用栅格地图对障碍物点进行过滤、聚类处理;然后利用路面点与栅格地图提取候选路边点;最后使用改进的RANSAC算法实现道边的提取。方法已成功运用在无人车上,实验表明,方法具有良好的检测效果。
环境感知;激光雷达;点云分割;道边检测
1 引言
道边检测是无人自主车进行自主导航与行驶的关键,是环境感知领域研究的重点内容,准确而稳定的道边检测是无人驾驶车安全可靠的重要保障。以往无人车的道边检测主要基于视觉与激光雷达两种检测方式[1~3]。基于视觉的道边检测,对于具有纹理与轮廓信息的道边具有很好的检测效果,但是不足之处在于道边没有明显的纹理边界,或是行人、障碍阻挡的情况下,比较难于检测。另一类基于激光雷达的道边检测则是利用了激光雷达可以获取深度信息的特性,对于具有一定落差轮廓的道边可实现有效的检测。
道边在不同的环境下有不同的定义,在非结构化环境下,道边可能是路边草丛与水泥地面的分界线,对于结构化或半结构化环境,道边一般指与路面存在一定高度落差的边缘区域。本文主要研究的是城市环境下的低矮道边的检测与提取,对于弯道等不规则道边可以进行检测,但是由于不适合进行多次函数拟合所以用当前道边的切线方向作为道边的延伸方向。
2 相关工作研究
单线激光雷达由于其数据量小,处理速度快,近年来得到了快速的发展[4]。Yuan等针对单线雷达提出了一种应用于结构化和半结构化环境的路面提取算法。运用了最大熵原理的模糊聚类方法提取路面。通过比较连续几帧雷达数据,确定正常路面的参考平面,进一步提取出路面上的障碍物[5];
多线激光雷达是在单线激光雷达基础上发展起来的,能够满足地面机器人快速方便的采集环境信息的需求。李永志,汪洋[6]等通过计算三维激光点云相邻点之间的相似度,将三维点云转化为二维相似度图像,再用图像处理的方法实现结构化道路的检测。相似度图像中主要包含了场景中地面和障碍的信息,可以较好地检测出地面和道边。Yu[7]等提出了一种基于非闭合Snakes的序贯路边滤波模型,主要研究对多个路边点的拟合和滤波,并取得了很好效果,但其假定路边具有连续性,这在很多情况下不具有可行性。
3 激光雷达安装
通常激光雷达采用垂直的安装方式,基于这样的安装方式可以最大程度的利用激光雷达的视野。然而,激光雷达本身存在距离越远点云越稀疏的特性,而雷达点云密度越稀疏也意味着感知能力较弱。
3.1 32线激光雷达介绍
Velodyne 32线激光雷达(图1(b))是目前无人驾驶车常用的多线全向激光雷达之一。雷达分为上下两个部分,上半部分是激光测距单元,由一组激光发射器与接收器组成,从上至下共有32根扫描线,角度跨度为-30.67°~10.67°,垂直角分辨率为1.33°,32根扫描线构成一个垂直扫描面。下半部分是机械转台,顺时针转动,用以实现雷达360°全向数据采集,每旋转0.16°采集一组扫描面的信息,当转完一圈即可获得全向的环境信息,工作周期10Hz。

图1
3.2 雷达安装与分析
与大多数激光雷达垂直安装方式所不同是,本文将两个激光雷达对称的水平安装在无人驾驶车的两侧如图1(a)中所示。此种安装方式可大大提高激光雷达在车体前方进方向上的点云密度。两种安装方式的比较如图2所示。
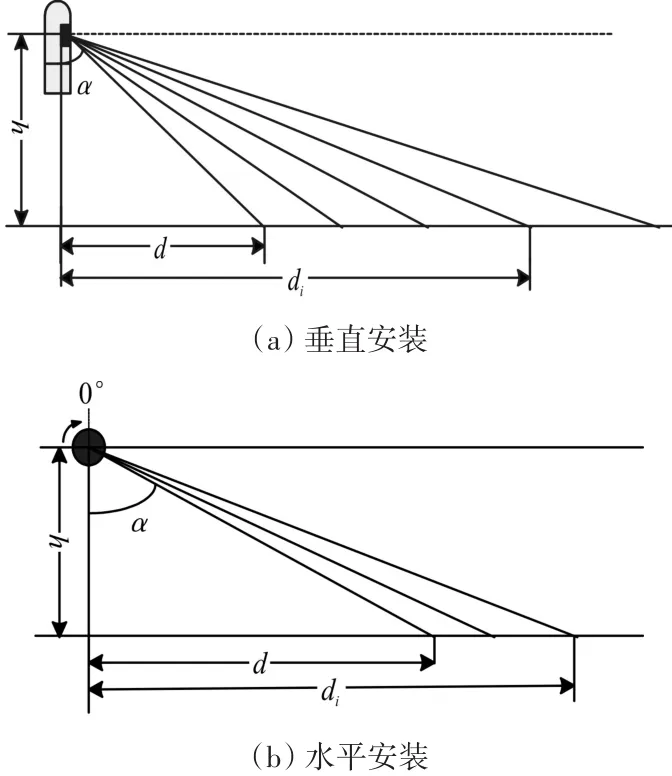
图2
由图2(a),在垂直安装方式下,激光雷达点距有如下关系式:

其中h是雷达架设高度,α是雷达最下方扫描线的扫描角度,▽α为雷达的垂直角分辨率,d表示最下方扫描线到雷达的水平距离,di表示第i根扫描线在地上的水平投影距离。第23至31根扫描线在水平面以上,不予以考虑。
由图2(b),在水平安装方式下,有如下关系式:
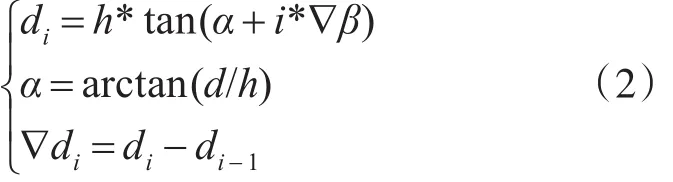
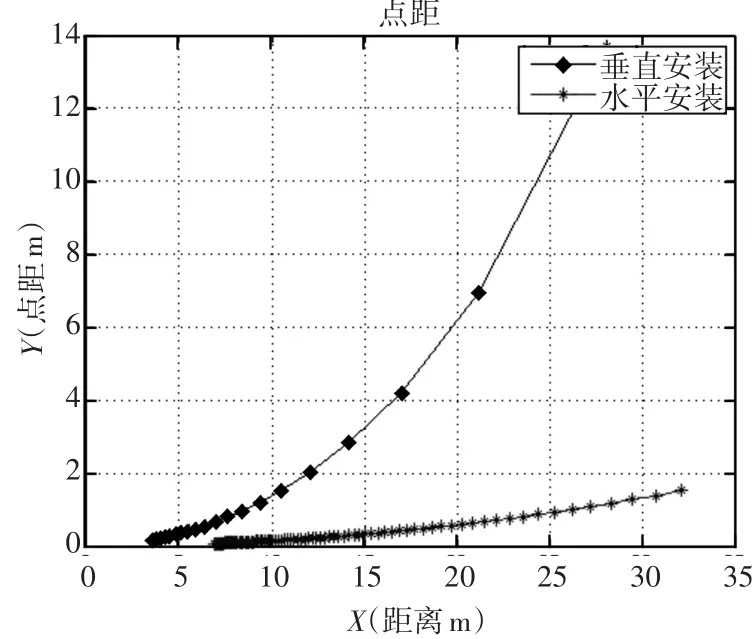
图3 点云密度分布示意图
d与h是雷达安装参数,h是雷达架设高度,α为起始扫描角,di表示零度扫描线在i时刻在水平面上的投影距离。▽β是雷达的水平角分辨率,i*▽β可由雷达直接获取。
图3给出了两种安装方式下的点间距变化情况,可以明显的看出在车体前方不同距离下,垂直安装方式下的点云密度要远大于水平安装方式。水平安装方式下,点云分布间隔变化小,对于环境的描述更为具体。
4 道边点检测与提取
4.1 梯度一致性的雷达点分割
图4(a)给出了道路的基本模型以及雷达扫描线在道边的变化示意图。当路面大致规整的情况下,由于雷达扫描线在路面上大致是一条直线段,即同一扫描角度上的点应离散分布在线段周围,但是由于道边与路面存在一定的落差,使得扫描线弯折,如图中P,Q所在的位置。雷达点分割就是通过检测P,Q点实现路面点与道边点的分割。
图4(b)、4(c)是双雷达的其中几个角度上的扫描线分布,图(b)是在平地上的点云分布,每条扫描线上的点大致落在同一直线上。图(c)是在道路上的点分布,由于道边的存在,扫面线弯折,弯折的地方则是有可能的道边点,点云分布与道路模型中体现的变化一致。
图4
图5 是雷达点分割示意图,对于任一一个雷达点,定义其梯度为与其相邻点的一阶导数,用与其相邻的两段线段之间的夹角表示该雷达点的变化程度,显然雷达点变化越明显,其相邻线段之间的夹角越大。
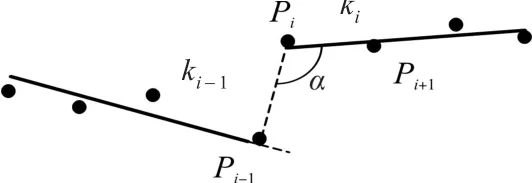
图5 特征点检测示意图
设雷达连续的三个扫描点分别为Pi-1,Pi,Pi+1,线段 Pi-1Pi与 PiPi+1之间的夹角为α,两条线段的斜率为Ki-1,Ki则
由于α与tan(α)是一一对应的(除直角外),为了方便计算与表示,用tan(α)来表征α。
由于雷达在扫描到障碍物时也会产生类似的突变,所有通过上述特征进行分割得到的点不仅包含道边点也包含障碍物点以及由于系统误差所致的噪点。如图6,图(a)是真实环境场景,图(b)是原始雷达点分布,图(c)是通过上述特征筛选下的点,不仅有道边点也有噪声点、障碍物点。
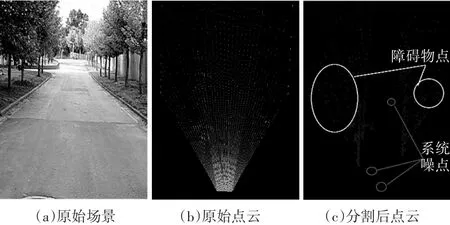
图6
4.2 候选道边点提取
道边点的提取是为了进行后续边界线的提取。在进行点云分割时本文使用LT(Line trace)算法[8~9]对同一扫描线上的多个雷达点进行分割,取其中最长的线段中间点作为路面种子点,算法的具体步骤如下:
选定合适大小的窗口W,从预处理后激光雷达第一个数据点开始,向后依次选取s个数据点,同时判断选取的这些初始点是否能构成一条直线。对这s个数据点进行最小二乘直线拟合,得到一条直线,并依次计算这s个点到该拟合直线的距离,判断是否大于阈值DT。若有任何一点到拟合直线的距离大于DT,说明所选s个数据点不能构成一条直线,窗口右移一位。若s个数据点到拟合直线的距离均小于DT,说明所选s个数据点能构成一条直线,记录其中第一个数据点为线段开始点,接着依次计算后续激光雷达数据点到该拟合直线的距离是否小于阈值DT,若是,将该点加入所选s个数据点中,并重新拟合直线;若否,则认为成功找到一条直线,记录该数据点前一个数据点为该直线的结束点。重复以上过程,直到循环结束,找到所有直线。
当确定路面点后,在栅格地图中从路面点开始向两端搜索,将找到的第一个有效栅格位置标记为道边点。道边点的选取示意图如图7,右图是实际的道边点提取的结果效果图,绿色是左道边点,蓝色是又道边点。
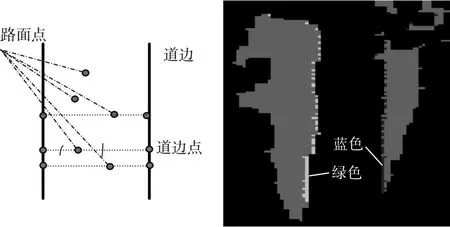
图7 候选道边点选取示意图
5 道路边界提取
道边提取是道边检测的重要部分,提取后的道边一方面便于无人车的航迹规划,另一方面便于道边进行帧间关联与跟踪。RANSAC算法多用于图像匹配与拼接,它能够根据一组包含异常数据的样本数据集中通过多次迭代,计算出数据的数据模型,对噪声的抑制能力比较强[10~12]。
RANSAC算法的参数选择很大程度上影响着算法的结果,实际适用中需要根据实际情况确定最小抽样集S的大小m以及阈值t。本文对RANSAC算法进行改进以期满足无人驾驶车的要求。
1)优化样本选取,按照一定的约束条件选取样本点而不是完全随机选取。由于城市道边大多较为规整,高度较为一致,可以先对道边点按照高度进行归类,优先选取高度较为一致的道边点作为样本。
2)当通过样本集估算出总体模型后,并不对剩下所有样本点进行模型检验,只取剩下样本中的部分进行模型检验,当样本达到总体一定比例后则任务模型符合真实结果。
3)对每次迭代的结果进行判断,设定一定的阈值,当内点达到一定比例则迭代结束,并不一定要完全迭代k次。
6 实验与分析
本章节针对城市低矮道边,对上述提出的道边点检测算法与道边拟合算法进行实验与分析。实验场景中的道边高度落差在10cm左右,路宽3m~4m,路面起伏较小,比较平坦。实验分为三个不同测试场景,包括有障碍物的直道、弯道、以及岔道口。
图8(a)实验场景一是校园环境下的一条低矮窄道,道路边界与路面存在一定落差,路面较为平坦,特殊的是路中间有两个隔离桩,但是隔离桩导致的错误道边点比较少并没有对提取的结果产生影响。图(a)右是用改进的RANSAC算法拟合的道边结果,其中绿色的表示左道边候选点,蓝色的为右道边候选点,红色线为提取出的道边线。
图8(b)实验场景二是一个Y型岔路口,由于车体偏右,左侧车道不在雷达视野区域,只有右侧车道的道边点被准确的提取出来了。虽然存在一定的错误道边点,但是对改进的RANSAC算法影响并不大,拟合的道边符合实际的情况。

图8 实验结果对比
图9 是实验场景一下连续180帧数据道边拟合的时间分布,算法运行的时间很大程度上取决于候选道边点的个数,算法运行的平均时间是17ms。能够满足无人车环境感知的实际需求。
7 结语
本文针对城市低矮道边检测与提取问题展开研究,通过分析雷达点空间分布提出基于梯度一致性的点云分割方法,该方法将雷达点云分割为路面点与障碍物点。通过栅格地图对分割后的点云进行简单的聚类与过滤后通过分割出的路面点与栅格地图确定候选道边点。最后通过改进的RANSAC算法实现道边提取,并在城市环境下对提出的检测算法进行实验与分析。通过实验表明,改进的RANSAC算法具有较好的抗噪性,在存在一定错误道边点的情况下也能够很好的提取道边。算法具有较好的实时性能够满足无人车的实际需求。
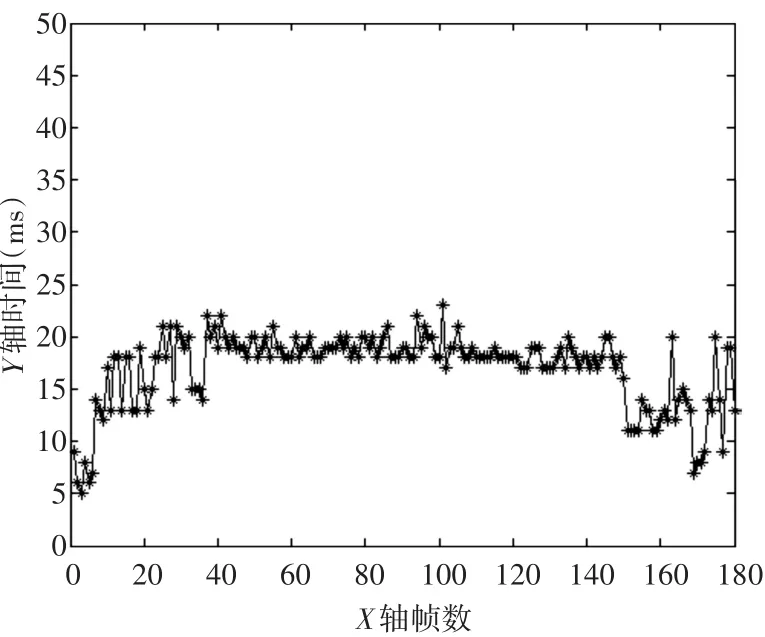
图9 连续180帧,算法运行时间(ms)分布
[1]Jamal H,Sami-ud-din,Habib H A.Road Boundary Detec⁃tion in Night Video Sequence:A Novel Technique for Au⁃tonomous Vehicles[C]//The,International Conference on Microelectronics,2006:264-267.
[2]Oniga F,Nedevschi S,Meinecke M M.Curb Detection Based on a Multi-Frame Persistence Map for Urban Driv⁃ing Scenarios[C]//International IEEE Conference on Intel⁃ligent Transportation Systems,2008:67-72.
[3]Zhao G,Yuan J.Curb detection and tracking using 3D-LI⁃DAR scanner[J].2012:437-440.
[4]Kodagoda K R S,Wijesoma W S,Balasuriya A P.Road curb and intersection detection using a 2D LMS[C]//Ieeersj International Conference on Intelligent Robots and Systems,2002:19-24.
[5]X.Yuan,C.X.Zhao,and H.F.Zhang,“Road Detection and Corner Extraction Using High Definition Lidar,”Informa⁃tion Technology Journal,vol.9,pp.1022-1030,2010.
[6]Li Y Z,Wang Y,Liu T.A Method of Road-boundary De⁃tection Algorithm Using Laser Radar Data[J].Shipboard electronic countermeasure,2012,35(1):55-59.
[7]Yu X G,Liu D X,Dai B.Road Edge Detection and Filter⁃ing Based on Unclosed Snakes and 2D LIDAR Data[J].Robot,2013,35(4):425-431.
[8]Borges G A,Aldon M J.Line extraction in 2D range imag⁃es for mobile robotics[J].Journal of Intelligent and Robot⁃ic Systems,2004,40(3):267-297.
[9]Borges G A,Aldon M J.A split-and-merge segmentation algorithm for line extraction in 2D range images[C]//15th International Conference on Pattern Recognition,2000,1:441-444.
[10]Lin Y,Saripalli S.Road Detection and Tracking from Aerial Desert Imagery[J].Journal of Intelligent and Ro⁃botic Systems,2012,65(1-4):345-360.
[11]Fisher M A,Bolles R C.Random Sample Consensus:A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography[J].Communica⁃tions of the Acm,1981,24(6):726-740.
[12]Schnabel R,Wahl R,Klein R.Efficient RANSAC for Point-Cloud Shape Detection[J].Computer Graphics Fo⁃rum,2007,26(2):214-226.
Curb Detection Based On Double Multi-beam LiDAR
SHI Tingmin CAI YunfeiYAN Ming
(Department of Computer Science and Technology,Nanjing University of Science and Technology,Nanjing 210094)
Curb detection is an important issue in the environment perception of unmanned vehicle,the effects of perception directly affect the performance of automatic driving.A new curb detection algorithm based on double multi-beam LiDAR is pro⁃posed.By using the gradient consistency characteristics divide LiDAR points into surface points and obstacle points,then grid map is applied to cluster and filter obstacle points,curb points is extracted with the grid map and surface points.Finally,the curb is ex⁃tracted by using improved RANSAC algorithm.The method has been successfully used in our unmanned ground vehicle,the applica⁃tion shows the good detection.
environment perception,LiDAR,point segment,curb detection
Class Number TP391
TP391
10.3969/j.issn.1672-9722.2017.12.010
2017年6月8日,
2017年7月29日
国家自然基金青年项目(编号:61305134);博士点基金项目(编号:20133219120035)资助。
石庭敏,男,硕士研究生,研究方向:环境感知。蔡云飞,男,讲师,硕士生导师,博士,研究方向:多机器人协作、环境感知。闫明,男,硕士研究生,研究方向:环境感知。
