基于神经网络算法的车辆行驶识别研究∗
2018-01-04史骏
史 骏
(西安铁路职业技术学院 西安 710026)
基于神经网络算法的车辆行驶识别研究∗
史 骏
(西安铁路职业技术学院 西安 710026)
针对汽车行驶的识别问题,通过选取6种典型道路工况作为工况识别的初始样本,对每一种典型道路工况进行分块以对识别样本进行扩充,同时选取了10个能够充分表征工况特征的特征参数并进行计算,对每一种典型工况的特征参数值进行归一化处理后形成其对应的标准特征参数向量,构建初始的学习向量量化的神经网络工况识别模型,对工况识别模型进行有效训练以提升模型的识别精度。模型训练完成后的神经网络算法,运用综合测试工况进行工况识别仿真验证试验。试验结果表明:训练完成的神经网络算法能够有效地对实际工况进行识别。
神经网络;学习向量量化;车辆行驶;工况识别
1 引言
传统的燃油汽车能量管理策略在提高整车燃油经济性方面效果显著,但其对行驶工况的依赖性很强,只能针对特定的行驶工况实现最优能量管理[1]。因此有必要对车辆实际行驶中的工况进行有效识别,从而提高能量管理策略对随机工况的适应能力。
目前,国内外的相关专家学者已经针对车辆工况在线识别进行了一些研究,并取得了一定的成果。其中,文献[2]对于待识别工况与标准工况样本的接近程度选择了欧几里德贴近度来表示,并未采用某种模式识别算法进行工况识别。文献[3]针对目前常用的工况识别算法的局限性和缺点,应用K均值聚类算法进行行驶工况识别,应用于混合动力汽车的整车能量管理中。文献[4]通过简化的神经网络模型对实时车速进行采集、分析和比较,在运行一段时间后,自动寻找出与之相近的标准循环工况。文献[5]采用遗传算法对若干种典型行驶工况对应的模糊控制器中隶属度函数进行优化,然后建立了一个基于模糊神经网络的行驶工路识别方法。文献[6]采用聚类分析方法将选取的典型循环工况进行分类,从而保证每类工况间具有等同的相似程度,提升了工况识别的准确性。文献[7]通过确定不同类型行驶工况下的驾驶风格区分方法,得到不同驾驶风格的车速信息,并与基于反向传播(BP)神经网络的行驶工况识别算法相结合,优化了行驶工况识别的识别效果。文献[8]采用神经网络模型对各标准工况的特征参数进行训练学习以进行实时工况识别,但其在特征参数选取、典型工况分块等方面存在着一些不足。
在以上研究的基础上,本文针对汽车行驶工况在线识别,选取典型道路工况并进行分块,计算得到其对应的标准特征参数向量构建初始的神经网络工况识别模型;对工况识别模型进行有效训练以提升识别精度,训练完成后进行了工况识别的仿真试验。试验结果表明,采用训练完成的神经网络工况识别模型能够有效地对车辆的实际工况进行在线识别。
2 行驶工况选取及特征参数分析
2.1 行驶工况
按照交通状况以及行驶地域的不同,行驶工况可以分为市区道路、郊区道路、高速公路三种基本类型。针对每类行驶工况,本文各选取了两种典型道路工况作为代表,总共选取了6种典型道路工况[9],具体如表1所示。
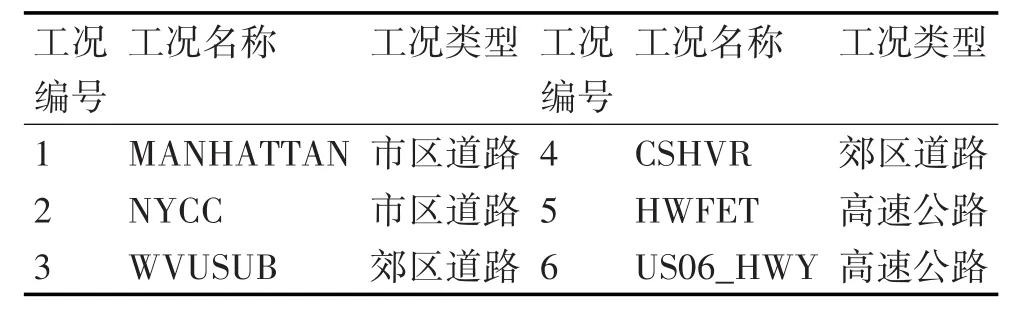
表1 典型道路工况
如果采用的典型工况样本时间长度太小,则可能无法包含典型工况的全部有效特征信息,将极大地降低工况识别的识别精度[10];同时,如果采用的样本时间过长,会导致典型工况信息库数据过少,导致工况识别的精度降低[11]。因此本文采用如图1所示的方法,将每种典型工况进行4等分,获得相应的工况块,再将相邻工况块中点之间的工况段作为一个工况块,对典型工况进行分割。针对每一种典型工况选取分割后的7个工况块作为样本,进一步增加样本的数量。
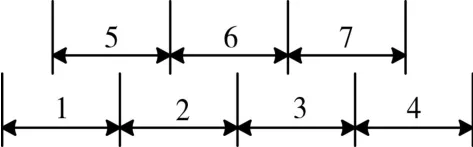
图1 典型工况分段示意图
2.2 参数设定
在获取了足够多数量的典型工况样本之后,本文选取了10个重要参数作为工况识别的特征参数,主要包括:1)平均车速 v'(m/h);2)最高车速vmax(m/h);3)平均加速度 a'(m/h2);4)最大加速度amax(m/h2);5)平均减速度 d'(m/h2);6)最大减速度dmax(m/h2);7)匀速时间比例rc,即车辆匀速的时间和工况样本总时间的比值;8)加速时间比例ra,即车辆加速的时间和工况样本总时间的比值;9)减速时间比例rd,即车辆减速的时间和工况样本总时间的比值;10)怠速时间比例ri,即车辆怠速的时间和工况样本总时间的比值。
针对所有典型工况块基于以上的10个特征参数进行计算与分析,整理成具体参数表。由于篇幅有限,现以MANHATTAN工况为例,列出其对应的特征参数表,如表2所示。
为了消除不同特征参数之间单位、数值以及变化范围对工况识别造成的影响,采用归一化的方法对各个典型工况块的特征参数进行标准化处理,并形成标准特征参数向量。变换函数如下

其中,x为特征参数原始数据;xmin为对应特征参数的最小值;xmax为对应特征参数的最大值。

表2 MANHATTAN工况特征参数表
3 神经网络算法的工况识别
3.1 算法概述
工况识别的目的在于在车辆行驶过程中,将车辆的实际行驶工况识别为与其最为近似的典型道路工况。本文采用神经网络进行工况识别。神经网络的优点在于网络结构简单,且不需要对输入向量进行预处理[12],因此简单易行。
神经网络结构由三层神经元组成[13]:输入层、竞争层和输出层,如图2所示。其中,输入层神经元与竞争层神经元之间采用全连接的方式,竞争层神经元与输出层神经元之间采用局部方式[14]。
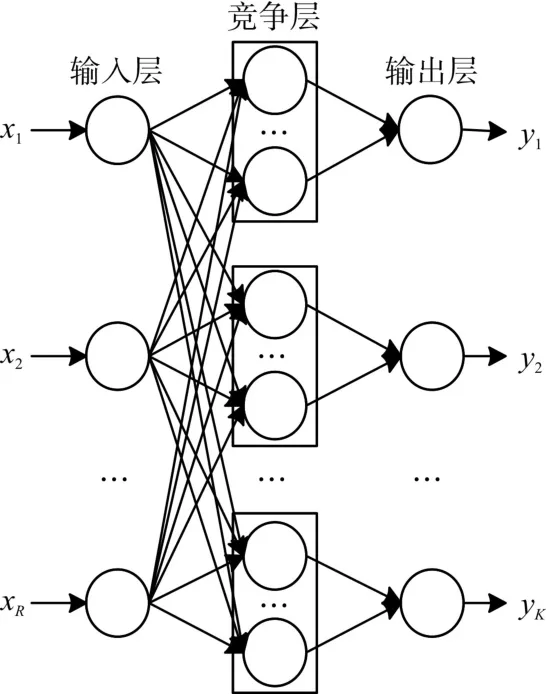
图2 神经网络结构
神经网络模型如图3所示。其中,X为R维的输入向量;S为竞争层神经元个数;W1为输入层与竞争层间的权值矩阵;n1和a1分别为竞争层的输入和输出;W2为竞争层与输出层间的权值矩阵;n2和Y分别为输出层的输入和输出,K为输出层神经元个数;||ndist||表示求两个多维度向量组之间的距离。

图3 神经网模型
3.2 模型应用
对应于每种行驶工况共有10个特征参数,因此输入向量X为10维向量,即输入层共有10个神经元。权值矩阵W1的每一行向量对应竞争层的一个神经元,即为某一个典型工况块对应的标准特征参数向量。因此,竞争层共有6×7=42个神经元,矩阵W1为42×10的矩阵。本文选取了6种典型道路工况,因而输出层共有6个神经元,矩阵W2为6×42矩阵,输出向量Y为6维向量。本工况识别模型中的关键参数和矩阵的定义如下

其中,xj(j=1,…,10)为输入向量 X对应的第 j个特征参数值,即为输入层神经元的值。

其中,WiT(i=1,…,42)为第i个标准工况块对应的标准特征参数向量,wi,j(j=10)为第i个标准工况块对应的第 j个标准特征参数值。

其中,di(i=1,…,42)为第i个标准工况块对应的标准特征参数向量WiT与输入向量X间的欧几里得距离。其中,向量ai仅有一个元素值为1,其余元素值均为0,值为1的元素对应最优的典型工况块。

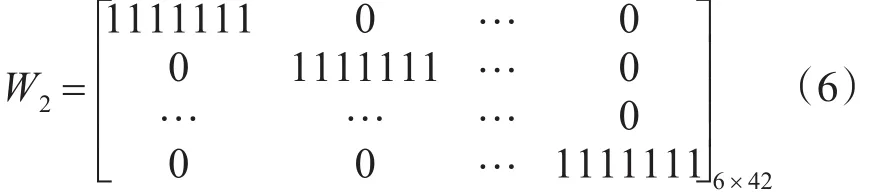
其中,矩阵W2的每列仅有一个1,其余为0,每一组相邻的7个1对应一种典型道路工况,共有6组这样相邻的1。

其中,向量Y仅有一个元素值为1,其余元素值均为0,值为1的元素对应最优的典型工况块所属的典型道路工况。
3.3 算法步骤
本文中,神经网络工况识别模型的模型训练按照以下步骤进行:
步骤1:初始化输入层与竞争层间神经元的权值 wi,j。其中,wi,j为第 i个标准工况块对应的第j个标准特征参数值,且

步骤2:以每一个典型工况块对应的标准特征参数向量WiT作为输入向量X送入输入层。
步骤3:根据式(9)计算每个竞争层神经元与输入向量X间的欧式距离,i=1,…,42。

步骤4:找到与输入向量X距离最小的竞争层神经元,进而找到与之连接的输出层神经元,将其对应的典型道路工况作为识别结果,即计算

步骤5:如果识别结果与输入向量自身对应的工况类别相同,即为正确识别,则根据式(11)调整对应参数值;反之为错误识别,则根据式(12)整对应参数值。

其中,δ为神经网络学习率,且δ为正值[15]。
步骤6:重复步骤5,直至模型满足系统误差要求时认为神经网络训练过程完成,即运用该模型能对采集到的随机工况进行正确的工况识别。
在车辆实际行驶过程中,连续地采集时长为150s的实际工况块,以此为识别对象将其对应的标准特征参数向量作为输入向量送入输入层,重复步骤3和步骤4[16],获取与当前实际工况最接近的典型道路工况,实现工况在线识别,并将识别结果作为下一个150s的实际工况的工况类型,以此为依据进行燃油汽车能量管理。
4 实验分析
本文随机选取了包含市区道路、郊区道路以及高速公路的6种典型道路工况,将这6种典型道路工况按照随机顺序首尾相接,共有720个随机组合。从这720个随机组合中随机选取一个组合(HWFET+NYCC+CSHVR+US06_HWY+WUVSUB+MANHATTAN)作为模拟车辆实际行驶过程的综合测试工况,进行工况识别仿真验证试验。
将6种典型道路工况首尾相接组成的综合测试工况是一种包含市区道路、郊区道路和高速公路的综合道路工况,如果针对其整个工况进行单一的工况识别,其结果并不能体现车辆实际行驶过程中的工况变化过程。故将该综合测试工况以识别周期150s为单位分割成等长的42个综合工况块,通过连续地对每个工况块进行识别来模拟车辆的实际行驶过程,验证工况识别模型的可行性。当综合工况块位于两种典型工况的交界处时,对应的典型工况类型以其包含较多的典型工况为准。
工况识别的识别精度ε的定义如下[17]:

其中,综合测试工况以识别周期150s为单位分割成了42等份,且Ca(i)为第i个综合工况块实际对应的典型道路工况,Cr(i)为工况识别模型识别出的第i个综合工况块对应的典型道路工况。当某一综合工况块位于两种典型工况的交界处时,以其包含较多的典型工况为准。依次对每个综合工况块进行工况识别,模拟车辆的实际工况识别过程,得到综合测试工况的识别结果,如图4所示。
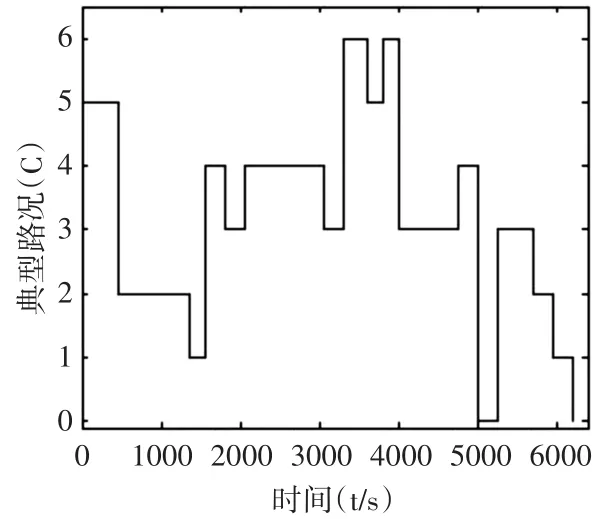
图4 综合测试工况识别结果
综合测试工况的识别结果表明:神经网络工况识别模型的识别精度为86%,模型可行且识别效果理想,该工况识别模型能够运用于燃油汽车能量管理中。
5 结语
本文在选取典型道路工况并进行分块后,通过标归一化计算得到对应的标准特征参数向量。构建初始的神经网络工况识别模型,对工况识别模型进行有效训练以提升识别精度。将选取的典型工况进行随机组合进而形成一种综合测试工况,以150s为识别周期进行了工况识别的仿真验证试验。仿真试验结果表明:本文所构建的神经网络工况识别模型能有效地对车辆的实际行驶工况进行工况在线识别。
[1]徐谦谦.汽车自动驾驶英文信息特征提取优化仿真[J].计算机仿真,2016(11):175-178.XU Qianqian.Automotive Autonomous English Informa⁃tion Feature Extraction Optimization Simulation[J].Com⁃puter Simulation,2016(11):175-178.
[2]杨斌,钟金英.卷积神经网络的研究进展综述[J].南华大学学报(自然科学版),2016,30(3):66-72.YANG Bing,ZHONG Jinying.Review of Convolution Neu⁃ral Network[J].Journal of Nanhua University(Science and Technology),2016,30(3):66-72.
[3]刘永刚,解庆波,秦大同,等.基于工况识别的混合动力汽车能量管理策略优化[J].机械传动,2016,40(5):64-69,73.LIU Yonggang,XIE Qingbo,QIN Datong,et al.Energy Management Strategy Optimization of HEV based on Driv⁃ing Pattern Recognition[J].Journal of Mechanical Trans⁃mission,2016,40(5):64-69,73.
[4]邱天宇,申富饶,赵金熙.自组织增量学习神经网络综述[J].软件学报,2016(9):2230-2247.QIU Tianyu,SHEN Furao,ZHAO Jinxi.Review of Self-Organizing Incremental Neural Network[J].Journal of Software,2016(9):2230-2247.)
[5]詹森,秦大同,曾育平.基于遗传优化K均值聚类算法工况识别的混合动力汽车能量管理策略[J].中国公路学报,2016,29(4):130-137,152.ZHAN Sen,QIN Datong,ZENG Yuping.Energy Manage⁃ment Strategy of HEV Based on Driving Cycle Recognition Using Genetic Optimized K-means Clustering Algorithm[J].Chinese Journal of Highway Engineering,2016,29(4):130-137,152.
[6]秦大同,詹森,曾育平,等.基于驾驶风格识别的混合动力汽车能量管理策略[J].机械工程学报,2016,52(8):162-169.QIN Datong,ZHAN Sen,ZENG Yuping,et al.Energy man⁃agement strategy of hybrid electric vehicle based on driv⁃ing style recognition[J].Journal of Mechanical Engineer⁃ing,2016,52(8):162-169.
[7]陈志佳,朱元昌,邸彦强,等.基于改进神经网络的IaaS云资源需求预测方法[J].华中科技大学学报(自然科学版),2016,44(1):46-51.CHEN Zhijia,ZHU Yuanchang,DI Yanqiang,et al.IaaS cloud resource demand forecasting method based on Im⁃proved Neural Network[J].Journal of Huazhong Universi⁃ty of Science and Technology(Natural Science Edition),2016,44(1):46-51.
[8]王楠,刘卫国,张君媛,等.基于视觉传感器的ADAS纵向行驶工况识别方法研究[J].交通信息与安全,2015,33(1):41-46.WANG Nan,LIU Weiguo,ZHANG Junyuan,et al.Identifi⁃cation method of ADAS longitudinal running condition based on vision sensor[J].Traffic information and safety,2015,33(1):41-46.
[9]秦大同,彭志远,刘永刚,等.基于工况识别的混合动力汽车动态能量管理策略[J].中国机械工程,2014(11):1550-1555.QIN Datong,PENG Zhiyuan,LIU Yonggang,et al.Dynam⁃ic energy management strategy of hybrid electric vehicle based on condition identification[J].China Mechanical Engineering,2014(11):1550-1555.
[10]何伟铭,宋小奇,甘屹,等.传感器校正的优化灰色神经网络建模方法研究[J].仪器仪表学报,2014(3):504-512.HE Weiming,SONG Xiaoqi,GAN Qi,et al.Research of optimized grey neural network modeling method for sen⁃sor calibration[J].Journal of instrument and instrument.2014(3):504-512.
[11]蔺宏良,余强,张雪莉.市区道路车辆行驶工况研究进展[J].机械科学与技术,2014(2):282-288.LIN Hongliang,YU Qiang,ZHANG Xueli.Research progress of vehicle running condition in urban area[J].Mechanical science and technology,2014(2):282-288.
[12]李建坡,姜雪,隋吉生.电动汽车充电站RFID智能信息管理系统[J].自动化仪表,2013(11):62-65.LI Jianpo,JIANG Xue,SUI Jisheng.RFID intelligent in⁃formation management system for electric vehicle charg⁃ing station[J].Automatic instrument,2013(11):62-65.
[13]张晓丹,黄海燕.基于免疫克隆算法的LVQ聚类算法权值优化[J].计算机科学,2013(1):27-28,53.ZHANG Xiaodan,HUANG Haiyan.Weight optimization of LVQ clustering algorithm based on Immune Clonal Al⁃gorithm[J].Computer science,2013(1):27-28,53.
[14]杨守建,陈恳.BP神经网络性能与隐藏层结构的相关性探究[J].宁波大学学报(理工版),2013(1):48-52.YANG Shoujian,CHEN Ken.Research on the correla⁃tion between BP neural network performance and hidden layer structure[J].Journal of Ningbo University(Sci⁃ence and Engineering Edition),2013(1):48-52.
[15]宋海生.基于扩展OPAX传递路径方法的轻型客车振动控制研究[D].长春:吉林大学,2012:34-36.SONG Haisheng.Research on vibration control of light passenger car based on extended OPAX transfer path method[D].Changchun:Jilin University,2012:34-36.
[16]林歆悠,孙冬野.基于工况识别的混联式混合动力客车控制策略研究[J].中国机械工程,2012(7):869-874.LIN Xinyou,SUN Dongye.Research on control strategy of hybrid electric bus based on condition identification[J].China Mechanical Engineering,2012(7):869-874.
[17]田毅,张欣,张良,等.神经网络工况识别的混合动力电动汽车模糊控制策略[J].控制理论与应用,2011(3):363-369.TIAN Yi,ZHANG Xin,ZHANG Liang,et al.Fuzzy con⁃trol strategy of hybrid electric vehicle based on condition identification of neural network[J].Control theory and Application,2011(3):363-369.
Research on Vehicle Identification Based on Neural Network Algorithm
SHI Jun
(Xi'an Railway Vocational and Technical Institute,Xi'an 710026)
Aiming at the identification problem of vehicle driving,by selecting 6 typical road conditions as the initial condi⁃tions for each sample identification,a typical road conditions are divided into blocks to identify the sample expansion,and selected 10 to fully characterize the working characteristic and calculating parameters,characteristic parameters of every kind of typical the condition of value standard parameter vector is normalized after the formation of the corresponding neural network mode recognition model,constructing learning vector quantization of the initial condition of recognition model for effective training in order to improve the precision of the models.The neural network algorithm is completed after the training of the model,and the work condition identi⁃fication and simulation test are carried out under the condition of comprehensive test.The experimental results show that the trained neural network algorithm can effectively identify the actual working conditions.
neural network,learning vector quantization,vehicle running,condition identification
Class Number TP391
TP391
10.3969/j.issn.1672-9722.2017.12.003
2017年6月7日,
2017年7月28日
国家自然科学基金-青年项目“基于驾驶意图的电动汽车电液复合制动协调控制系统研究”(编号:51507013)资助。
史骏,男,硕士,讲师,研究方向:控制工程,机电一体化。
