相控阵雷达协同探测任务调度研究*
2018-01-02李靖舒高贵明廖卫东潘瑞云
李靖舒,高贵明,廖卫东,潘瑞云
(1.南京信息工程大学,江苏 南京 210044;2.南京船舶雷达研究所,江苏 南京 210003)
0 引言
随着军事科技的日新月异,世界各国更加重视各探测设备的协同探测能力。相控阵天线系统具有无惯性的快速电子波束扫描、空间低损耗、大功率合成等优点,能够克服传统雷达协同资源分配不均,造成资源浪费、效率较低的问题[1]。将数字相控阵系统技术应用于协同探测系统,既可发挥相控阵系统高度灵活的系统资源调度优势,实现远距离、宽覆盖、高数据率、高分辨、高精度探测,又能充分利用多基协同探测反隐身、抗干扰、抗摧毁能力强的优点[2]。
雷达协同探测系统具有空间、体制、能量、频率分集等诸多优势,已成为当前装备体系集成作战运用的研究热点之一。随着协同探测技术的发展,探测资源优化管控正成为协同探测系统当前迫切需要解决的关键问题[3]。文献[4-6]对雷达组网探测进行了研究,但主要是基于具体组网系统而言或仅考虑完成主要功能,尚未对协同探测资源调度提出具体算法。本文对相控阵雷达协同探测提出一种资源调度算法,具有一定的参考价值。
1 相控阵雷达协同探测
相控阵雷达协同探测,指的是为实现作战任务目标,通过统一指挥管控系统,使多节点雷达在时间同步和空间同步下按照最优的时间序列、工作参数和工作方式,实现对目标远距离、宽覆盖、高精度探测的一种工作方式[7]。
1.1 协同探测的优势
身处高密集电磁信号和多方位、多层次威胁目标的复杂战场环境,单一体制雷达和独立单节点雷达在作战使用上难以满足任务需求[8]。多节点雷达协同探测系统将多频段、多体制雷达在统一资源管控下进行资源优化,将获得比单节点探测更大的性能优势,具体表现为:
(1) 提高了资源利用效率。多节点协同探测使各节点在最合适的时机,作用于相应的典型目标,从而节约了资源,提高了效率。
(2) 增强了探测系统的生存能力。当有节点无法使用或受到干扰、攻击时,其他部分节点依旧可以提供探测信息,实现探测性能的可持续化。
(3) 提升了资源调度的灵活性。多节点协同探测将为资源管控提供更多的选择方案,提升调度的灵活性。
多节点协同探测打破传统单节点雷达条块分割界限,将多节点雷达资源进行集中管理,整合资源协同使用,从而充分发挥多节点雷达优势互补能力[9]。
1.2 协同探测多节点选配和协同策略规划
相控阵雷达协同探测多节点选配时,主要考虑以下几个方面:
(1) 扩展频率覆盖范围。多节点协同探测能够扩大频率覆盖范围,提升多节点间相互引导、宽覆盖,增加整个系统的探测性能。
(2) 增加时间覆盖范围。当某个节点无法正常工作时,可通过其他节点进行弥补探测,增加整个系统的时间覆盖范围和检测概率。
(3) 改善探测性能。通过多个节点相互引导,协同工作,增加探测的有效性、精确性和连续性。
在实际作战中,由于作战任务不同和节点性能各异,对于同一种目标任务,在满足任务需求的同时可能存在多种节点分配方式[10],需要相应的协同策略进行工作方式、节点分配的选择,以达到更好的探测性能。
2 协同探测资源调度模型
面对复杂的战场环境,单个任务往往需要多个节点同时提供协同保障,满足一种任务的协同策略是多样的,而节点资源和性能是有限的;同时,多节点协同探测调度的灵活性与多样性也增加了调度决策的复杂性。为了有效解决协同探测资源调度问题,需要对多节点协同探测建立资源调度模型,对调度策略进行优化,实现节点资源的统一管控,从而提高多节点协同探测系统的资源利用率和探测性能。
2.1 资源调度模型
雷达任务是一系列有时间限制和时序要求的雷达事件序列,可以用若干属性的集合表征,描述如下:
Ri={Pi,T0,Tni,tai,tdi,tei,tsi,tdwi,twi,TFbi,TFei},
(1)
式中:Pi为任务工作方式优先级;T0为调度间隔;Tni为任务的节点分配属性;tai,tdi,tei,tsi分别为任务请求的到达时刻、截止时刻、期望执行时间、实际执行时间;tdwi为任务波束驻留时间;twi为时间窗宽度;TFbi,TFei为表示调度间隔中时间碎片的起始时间和终止时间。
根据上述任务模型设计调度算法。
2.2 资源调度性能评价指标
(1) 时间利用率(TUR)
(2)
式中:T0为调度间隔;tdwi为第i个调度任务的驻留长度。
(2) 平均偏移率(ATSR)
(3)
式中:tsi为第i个调度任务的执行时间;tei为第i个调度任务的期望时间;T0为调度间隔。
(3) 单个雷达任务的容量 (REVi)[11]
REVi=f(pi,tdwi,tsk),
(4)
式中:表示调度此事件的所获得的收益;f(·)为容量函数,其根据任务优先级、时间利用率、时间偏移量综合设计获得。f(·)具有以下特点:
f:I×(0,∞)→(0,∞).
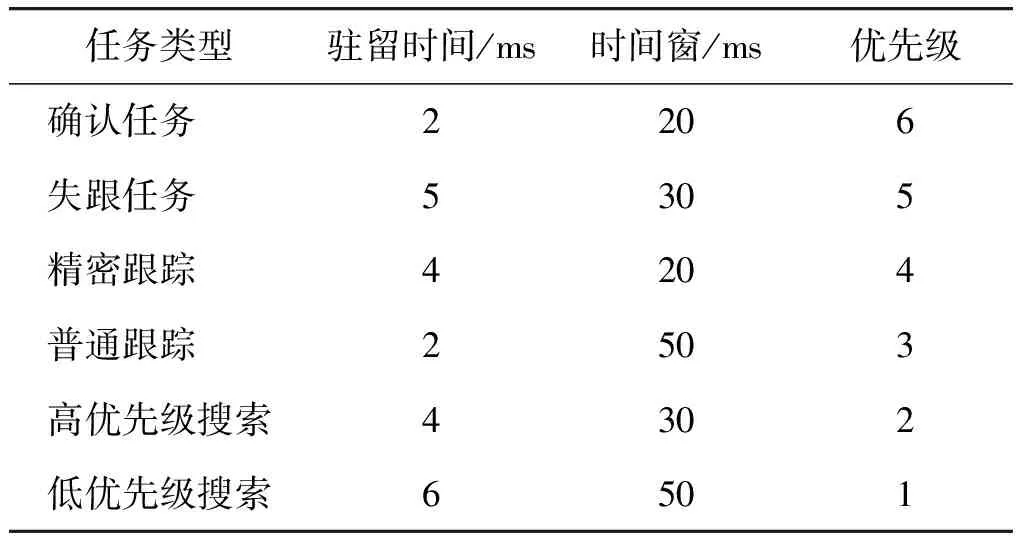
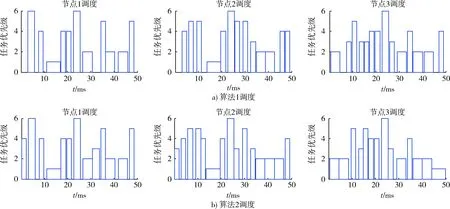
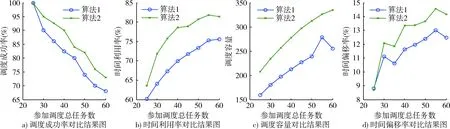
1) ∀p∈I,∀tsk∈(0,∞),f(p,·,tsk)是单调递增函数,即f(p,tdw1,tsk) 2) ∀tdw∈(0,∞),∀tsk∈(0,∞), f(·,tdw,tsk)是单调递增函数,即f(p1,tdw,tsk)< f(p2,tdw,tsk),当且仅当p1 3) ∀p∈I,∀tdw∈(0,∞),f(p,tdw,·)是单调递减函数,即f(p,tdw,tsk1)>f(p,tdw,tsk2),当且仅当tsk1 f(·)函数设计具有一定的灵活性,本文采取下面的形式: (5) 式中:m,n,q为调整系数表示任务优先级、时间利用率、时间偏移率3因素对事任务容量的影响程度,满足m,n,q≥0,m+n+q=1。 (4) 调度容量(SVj) (6) 单个调度间隔内,参与调度的雷达任务的容量之和。 (5) 调度成功率(SSR) (7) 式中:M,N分别为已调度的雷达任务和参加资源调度的总任务数。 时间窗在相控阵雷达任务调度算法中得到了广泛的应用,文献[12]对时间窗进行了详细的研究,文献[13-14]在调度算法研究中应用了时间窗。在时间窗任务调度算法中,时间偏移量和时间利用率是一对矛盾。 针对多节点协同探测,提出一种优化模型。在各节点调度间隔中寻找与任务驻留长度相近的时间碎片来插入任务,提高时间利用率。权衡时间偏移量和时间利用率2个因素,在不显著增加时间偏移量的前提下,提高时间利用率。 根据上述分析以及上节提出的性能指标,本文提出以下优化模型: (8) 其中满足 tff=TFej-TFbj>=tdwi. (9) 式(8)表示权衡时间利用率和偏移量2个因素,在调度间隔中寻找时间碎片,使满足在不显著增加时间偏移量的前提下,提高时间利用率。式(9)保证寻找的时间碎片长度要大于驻留,以便任务可以插入时间碎片中。 借助文献[15]的层次化分析方法(AHP),针对时间偏移量和时间利用率2个因素,本文选取p=0.363,q=0.637,经计算,满足一致性要求。 针对多节点协同探测,提出一种协同调度算法。首先,先进行协同任务调度。将协同任务填满各节点的调度间隔,以获得最好的探测性能;然后,对于各个单节点都能满足探测性能的任务,将申请队列中的任务按优先级依次加入执行队列,遍历各节点,按照期望时间进行任务调度,使参与调度任务的时间偏移尽可能的小;最后,将剩余的申请任务按2.3节描述的调度优化模型进行调度,依次插入时间碎片,进一步压缩时间碎片,在不显著增加时间偏移量的前提下,提高时间利用率。 协同调度算法流程图如图1所示。 基于以上研究,对算法进行仿真分析。假设进行3节点协同探测任务调度仿真试验,任务调度间隔SI=50 ms,仿真时间为1个调度周期,设置5类任务,总共40个任务请求,其中5个为协同任务。具体参数如表1所示。 得到的任务调度仿真结果如图2所示,且经过100次蒙特卡罗仿真,得到如表2所示的性能比较,其中算法1为时间窗调度算法,算法2为本文提出的协同探测任务调度算法。可以得出,算法2时间利用率(TUR)、调度容量(SV)和调度成功率(SSR)均优于算法1,能够获得更好的任务调度性能。 表1 任务参数表Table 1 Table of tasks parameters 图1 协同调度算法流程图Fig.1 Flow chart of cooperative scheduling algorithm 算法TUR(%)ATSR(%)SV(%)SSR(%)169.9411.62212.6982.5278.5813.35278.0690.0 图3为2种算法的任务调度性能指标随参与调度任务数变化的比较。可以发现,随着参与调度任务数的增加,在不显著增加时间偏移率的前提下,算法2各项性能指标均优于算法1,提高了时间利用率,同时也提升了雷达协同探测性能。通过仿真,验证了本文提出的算法有效性。 图2 2种调度算法任务调度结果Fig.2 Task scheduling results of two algorithms 图3 2种调度算法性能指标对比Fig.3 Performance comparison of two algorithms 本文针对相控阵雷达协同探测任务调度需求,提出了一种协同探测任务调度算法,针对时间窗任务调度算法中时间偏移量和时间利用率这一矛盾问题,通过将任务插入时间碎片来提高时间利用率。仿真结果表明,基于本文提出的协同探测任务调度算法,在不显著提高时间偏移量的前提下,提高了时间利用率,提升了探测性能,对协同探测任务调度研究具有一定的参考价值。 [1] 张光义.相控阵雷达技术[M].北京:电子工业出版社,2006. ZHANG Guang-yi.Phased Array Radar Technology[M].Beijing:Publishing House of Electronics Industry,2006. [2] 石章松,王辉华,王航宇.协同传感器管理体系结构及方法[J].电子器件,2005,28(3):571-576. SHI Zhang-song,WANG Hui-hua,WANG Hang-yu.Cooperative Sensors Management Architecture and Method[J].Chinese Journal of Electron Devices,2005,28(3):571-576. [3] 程小枫,涂刚毅,吴少鹏.双波段旋转相控阵雷达任务调度算法[J].科学技术与工程,2014,14(23):73-80. CHENG Xiao-feng,TU Gang-yi,WU Shao-peng.Task Scheduling Algorithm for Dual-Band Rotating Phased Array Radar[J].Science Technology and Engineering,2014,14(23):73-80. [4] 周文辉.相控阵雷达及组网跟踪系统资源管理技术研究[D].长沙:国防科学技术大学,2004. ZHOU Wen-hui.Research on Resource Management Technology for Phased Array Radar and Its Network in Tracking System[D].Changsha:National University of Defense Technology,2004. [5] 孙国伟,谢军伟,孙博.一种新的组网雷达优化布站方法[J].计算机仿真,2013,30(9):22-25. SUN Guo-wei,XIE Jun-wei,SUN Bo.New Method of Network Radar Optimized Disposition[J].Computer Simulation.2013,30(9):22-25. [6] 梅发国,乐园园,吴青松.基于任务的雷达网资源管理系统设计[J].指挥信息系统与技术,2013,4(3):35-39. MEI Fa-guo,LE Yuan-yuan,WU Qing-song.Design of Mission-Based Resource Management System of Radar Net[J].Command Information System and Technology,2013,4(3):35-39. [7] 胡小全,刘钦,孙建军.雷达组网协同探测范围研究[J].雷达科学与技术,2015,3(6):223-237. HU Xiao-quan,LIU Qin,SUN Jian-jun.Study on Cooperative Detection Coverage of Radar Network[J].Radar Science and Technology,2015,3(6):223-227. [8] 叶朝谋,丁建江,吕金建,等.基于模式化的雷达组网资源管控功能模型[J].系统工程与电子技术,2013,35(9):1979-1982. YE Chao-mou,DING Jian-jiang,LÜ Jin-jian,et al.Resource Control Function Model for Radar Networking Based on Moralization[J].Systems Engineering and Electronics,2013,35(9):1979-1982. [9] 卫杨勇,徐世友,陈曾平.面向任务的层次化机载多传感器智能管理策略[J].计算机工程与应用,2011,47(8S):295-298. WEI Yang-yong,XU Shi-you,CHEN Zeng-ping.Hierarchical Task-Oriented Intelligent Airborne Multi-Sensor Management Strategy[J].Computer Engineering and Applicatons,2011,47(8S):295-298. [10] 王发龙,姜宁.舰载多传感器协同探测资源调度模型构建[J].现代防御技术,2016,44(1):205-212. WANG Fa-long,JIANG Ning.Construction of Shipboard Multi-Sensor Co-Detection Resource Scheduling Model[J].Modern Defence Technology,2016,44(1):205-212. [11] 曾光.多功能相控阵雷达自适应调度算法研究及应用[D].长沙:国防科学技术大学,2003. ZENG Guang.Research on and Application of Adaptive Scheduling Algorithm for Multifunction Phased Array Radars[D].Changsha:National University of Defense Technology,2003. [12] 何金新,邱杰,王国宏.相控阵雷达事件调度中的时间窗研究[J].雷达科学与技术,2010,8(1):80-86. HE Jin-xin,QIU Jie,WANG Guo-hong.Study on Time Window in Multifunction Phased Array Radar Task Scheduling[J].Radar Science and Technology,2010,8(1):80-86. [13] 卢建斌,胡卫东,郁文贤.多功能相控阵雷达实时任务调度研究[J].电子学报,2006,34(4):732-736. LU Jian-bin,HU Wei-dong,YU Wen-xian.Study on Real-Time Task Scheduling of Multifunction Phased Array Radars[J].Acta Electronic Sinica,2006,34(4):732-736. [14] 卢建斌,胡卫东,郁文贤.多功能相控阵雷达实时驻留的自适应调度算法[J].系统工程与电子技术,2005,27(21):1981-1984. LU Jian-bin,HU Wei-dong,YU Wen-xian.Adaptive Scheduling Algorithm for Real-Time Dwells in Multifunction Phased Array Radars[J].Systems Engineering and Electronics,2005,27(21):1981-1984. [15] 陈希祥,邱静,刘冠军.基于层次分析法与模糊综合评判的测试设备选择方法研究[J].兵工学报,2010,31(1):68-73. CHEN Xi-xiang,QIU Jing,LIU Guan-jun.Research on the Method of Test-Equipment Selection Based on Analytic Hierarch Process and Fuzzy Comprehensive Assessment[J].Acta Armamentarii,2010,31(1):68-73.
2.3 多节点协同探测资源调度优化模型
3 协同探测调度算法
3.1 算法实现原理
3.2 协同调度算法实现流程
4 仿真分析


5 结束语
