带落角约束有限时间收敛滑模制导律*
2018-01-02李鹏程
李鹏程
(中国天绘卫星中心,北京 102102)
0 引言
为提高反坦克导弹的攻击效能,传统直瞄攻击已不能满足现代作战需求,需要对目标采取大落角攻击。因此,在进行导引律设计时,不仅希望有高命中精度,而且需要导弹以期望的攻击角度命中目标,以增强战斗部毁伤效果。
自从Kim和Grider首次在机动弹头再入制导的研究中引入落角约束问题[1]以来,一些学者针对不同的应用背景,根据不同的理论方法提出了许多具有终端角度约束的导引律,基本上可归纳为最优导引律、变结构导引律以及其他类型的导引律[1-8]。基于最优理论设计的导引律不受性能指标和终端约束的限制,理想情况下具有最佳制导性能,但其依赖于各种假设与简化,应用于现实问题时鲁棒性较差[1-4]。带落角约束的偏置比例导引律形式比较简单,易于实现,但是对导航信息偏差的敏感性较低,导致制导精度不高[5-6]。由于滑模变结构控制系统具有强鲁棒性,加之控制算法比较简单,近年来,变结构控制理论逐步应用于制导律设计[7-10]。
尽管带攻击角度约束制导律被广泛研究,但是这些制导律中的弹目视线角速收敛至0所需时间趋向于无穷大。而在实际情况下,解决制导问题的时间是有限的。对于控制系统,有限时间控制设计是确保系统在限制的时间内达到要求的状态。近年来,关于非线性系统有限时间稳定问题得到了许多结论[11-15]。因此设计带落角约束有限时间导引律是十分必要的。
根据滑模变结构控制理论和有限时间收敛稳定理论,本文改进设计了有限时间收敛滑模制导律,能够在碰撞之前满足命中精度和攻击角度的双重要求。并综合采用双曲正切函数法和变开关系数法削弱变结构控制中产生的抖振现象,有效地提高了导引律的命中精度。
1 问题数学描述
1.1 弹目相对运动模型
在建立交战模型之前做如下假设:
(1) 导弹和目标视作在平面内运动的质点,且忽略地球自转的影响;
(2) 导弹和目标以常值速率运动,且导弹的速率远大于目标的速率;
(3) 导弹的自动驾驶仪的动态特性可视为一阶惯性环节;
(4) 假设目标只在俯仰平面内做水平运动。
对于纵向攻击平面,导弹与目标的相对运动关系示意图如图1所示。

图1 导弹与目标相对运动关系Fig.1 Relative motion between missile and target
图1中,r为弹目相对距离;q为弹目视线角,vm,vt分别为导弹、目标的运动速度;θm,θt分别为导弹弹道倾角与目标航迹角;am,at分别为导弹、目标运动的法向加速度;ηm,ηt分别为导弹、目标的速度矢量与弹目视线之间的夹角。规定水平基准线逆时针旋转到弹目视线上时q为正,反之为负。根据图中1所示的几何关系,可以得到以下弹目相对运动方程组:
(1)
(2)
ηt=θt-q,
(3)
ηm=θm-q,
(4)
θt=at/vt,
(5)
θm=am/vm.
(6)
联合式(1)~(6)可得
(7)
1.2 落角约束问题


vtsin(θt-qd)-vmsin(θd-qd)=0,
(8)
qd-θd<π/2.
(9)
式(9)表示导弹快要命中目标时目标在视场范围内。对于给定的θm和θt,存在唯一的qd满足上面2式。针对反坦克导弹所打击目标的特性,坦克与装甲车辆基本在水平面保持匀速运动,即θt=0,则qd,θd变为非时变量,且qd≈θd,认为此时期望落角就是期望视线角。
取状态变量
x1=q(t)-qd,
(10)
(11)
当状态变量x1趋近于0时,则满足了弹体以期望落角与目标接近的任务;当状态变量x2趋近于0时,则满足了导弹击中目标的要求。
式(10)和式(11)分别对状态变量关于时间求导数,并结合式(7)可得以下状态方程:
(12)
式(12)中状态x1与x2有关联,只要系统状态变量x1,x2在有限时间内渐进稳定到0,导弹就能命中目标。
2 带落角约束导引律设计
定义Ac为导弹制导指令,此处把导弹自动驾驶仪视为理想环节无时延,则
Am=Ac.
(13)
此时系统状态方程可写为
(14)

选取滑模面切换函数为

(15)
s第1项使弹目视线角速率趋向于0;第2项保证满足期望落角的要求。
结合文献[7]的趋近律形式,为保证到达条件和良好的动态特性,本文采用的滑模面趋近律为
(16)
式中:k2,ε分别为趋近律系数和开关函数项系数,k2>0,ε>0。

对式(15)微分得
(17)
将式(14),(16)带入式(17),整理可得
εsgns+cosηtat].
(18)
cosηtat≤f,
(19)
式中:f为整个制导过程中的最大值。
则式(18)可进一步简化为

(20)
为方便描述,记导引律式(20)为VSG1。
3 有限时间收敛特性分析
3.1 有限时间收敛有关概念
针对非线性系统
(21)
式中:函数f:U0×R→Rn为在U0×R上连续的,f(0,t)= 0,U0为原点x=0的开邻域。

(22)

当t≥T(x0)时,有V(x)=0,最后得到
3.2 导引律有限时间收敛特性分析
下面分析系统的收敛特性,其中系统状态的运动可以分为2个阶段:趋近状态和滑模状态。
对于趋近状态,选取Lyapunov函数为V1=s2≥0,对其求导数有
(23)
由引理1可知,系统状态可在有限时间内收敛至滑模面,收敛时间满足
(24)

当到达滑模面后,系统状态会继续运动,直到其收敛至0。所以状态会满足
(25)
(26)

(27)
由引理1可知,收敛时间满足

(28)
因此,制导系统总体收敛时间可表示为
Tf≤T1+T2≤

(29)
由式(24)可知,ε越大收敛到滑动模态的速度越快;由式(28)可得,k1越大在滑动模态上视线角速率收敛至0和视线角收敛至期望值的收敛速度越快。
4 考虑导弹自动驾驶仪特性的导引律设计
导引律VSG1是在将导弹自动驾驶仪视为理想环节下设计而出的,但在实际应用过程中,导弹自动驾驶仪的延迟特性通常会使制导精度变差,特别是对于机动目标。因此,设计导引律时充分考虑自动驾驶仪特性具有一定的实际意义。本文中,将导弹自动驾驶仪特性近似为一阶惯性环节,表达式为
(30)
式中:τ为导弹自动驾驶仪时间常数;ac为导弹制导指令;am为通过弹上惯导系统测量的导弹当前加速度。
定义状态变量x3=am,合并式(14)和式(30)可得考虑自动驾驶仪特性的系统状态方程

(31)
4.1 目标不机动情况下导引律设计
当目标不机动时at=0,式(31)简化为
(32)
引入新变量z1,z2:
(33)
式中:虚拟控制量u1的表达式为
(34)
对z1求导可得
(35)
对z2求导可得

(36)
设计导引律ac:

(37)
式中:λ>0。将式(37)代入式(36)中得
(38)
构造Lyapunov函数
(39)
对V2求导,并结合式(35)和式(38)得
(40)
因此V2渐近收敛于0。对比式(34)与式(20)不难发现,虚拟控制量u1等价于变结构项ε取0时的导引律,z1即滑动模态面s,λ决定了制导系统趋近滑模面的收敛速度,这样通过保证滑模面的收敛来保证视线角速率收敛至0和攻击角度收敛至期望的角度,从而确保制导精度和制导性能。
4.2 目标机动情况下导引律设计
对于目标机动的情况,本文引入新变量z3,z4:
(41)
式中:虚拟控制量u2的表达式为
(42)
式中:ε=f+α≥f,而α>0。对z3求导可得

(43)
对z4求导可得
(44)
设计导引律ac:
(45)
将式(45)代入式(44)中得

(46)
构造Lyapunov函数
(47)
对V3求导,并结合式(43)和式(46)得


(48)
因此V3渐近收敛于0。对比式(42)和式(20)可看出,虚拟控制量u2近似等价于导引律VSG1,而z3即为滑动模态面s,参数λ决定了制导系统趋近滑模面的收敛速度,该导引律保证了当前导弹法向加速度am收敛于导引律VSG1的表达形式,滑模面收敛至0附近的领域,从而确保制导精度和制导性能。
对比目标分别处于非机动与机动状态情况下的导引律(37)和(45),可以发现式(45)比式(37)多一个变结构项,即当ε=0时,式(45)变为式(37)。因此,目标非机动情况下导引律是目标机动情况下导引律的一种特殊情况。为方便描述,记导引律(45)为VSG2。
5 抖振削弱
在理论角度,由于滑动模态可以按照需要设计,而且系统的滑模运动与控制对象的参数变化和系统干扰无关,因此滑模变结构控制系统的鲁棒性要比一般常规的连续系统强。但在实际制导控制系统中,由于滑模变结构控制在本质上不连续开关特性,将会引起系统的抖动。其产生的主要原因有开关在时间和空间上的滞后,以及系统惯性的影响。抖振现象会影响控制系统的稳定性,导致导弹命中精度的降低。抖振是变结构控制系统的严重缺陷,也是阻碍变结构控制应用的主要障碍。在变结构制导律研究中,目前常用饱和函数法、变开关系数法或者双曲正切函数法等削弱抖振现象的产生。
5.1 饱和函数法
饱和函数法是将不连续的符号函数连续化,其表达式为
(49)
式中:δ>0,称为边界层厚度,也称消颤因子。
当δ较小时,拥有较高的鲁棒性。但在现实问题中存在较大时间滞后,需要δ较大,存在一定的矛盾。
5.2 双曲正切函数法
双曲正切曲线y=tanhx有关于原点对称,原点处曲线斜率为1,并以y=±1为渐近线,如图2所示。

图2 双曲正切函数y=tanh x的曲线轨迹Fig.2 Curve of hyperbolic tangent function y=tanh x
由图2可以看出,通过改变双曲正切函数曲线在原点处的曲线斜率,双曲正切函数曲线可以很好地逼近符号函数。因此通过引入式(50)来削弱变结构导引律中所存在的抖振问题。
(50)
式中:ξ>0,调整ξ的取值,可以改变双曲正切函数在原点处的斜率。
5.3 变开关系数法
导引律VSG2中,若ε的值较小,则状态变量趋近于滑模面的速度慢,可以有效地减小抖振。但ε取值过小,则到达切换面的时间会过长,系统不再是滑动模态控制系统。
综合削弱抖振现象和控制到达切换面的时间2个方面的考虑,本文设计的ε将随着接近切换面而减小。ε的表达式为
ε=ar+b,
(51)
式中:a,b>0。
当r趋向于0时,可以确定b的取值,其作用保证制导系统处在滑模控制下。同时需要满足前面ε=f+α,其中cosηtat≤f,则b取为f;而后根据r值最大时的r0和ε的上限确定a的取值,确保系统以较快速度趋近滑模面的同时尽量减少抖振幅度。
以往的研究多采用上面介绍的方法中的一种来削弱抖振,取得一定的成果,但仍存在改进的空间。本文在研究中尝试同时使用双曲正切函数法和变开关系数法。用双曲正切函数替代符号函数,同时变开关项系数ε用表达式(51)代替。综合式(45),(50),(51),改进后的导引律表达式为
(52)
记导引律(52)为VSG3。
6 仿真与结果分析
制导过程中,导弹的在坐标系中的初始位置是xm 0=0,ym 0=0,初始弹道倾角θm=0,导弹速度vm=160 m/s;目标的初始位置是xt 0=2 000 m,yt 0=0;期望落角为75°;制导参数取值:τ=0.1,k1=3,k2=2,λ=10,a=0.1,b=20,ξ=0.1。
为考察本文所改进设计导引律的制导性能,在仿真过程中,除文中提到的导引律VSG1和VSG3,还引进了偏置比例导引律(BPNG)作为比较。仿真结果如图3~7和表1所示。

表1 考虑自动驾驶仪延迟特性仿真结果Table 1 Simulation result with autopilot dynamics

图3 滑模面变化规律Fig.3 Variations of sliding surface
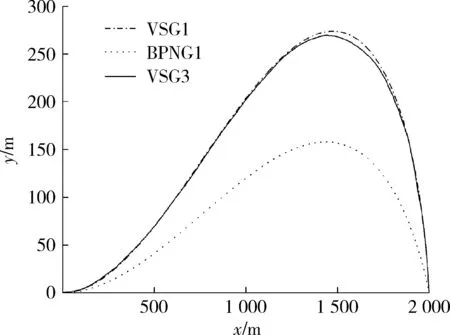
图4 弹道曲线Fig.4 Curve of ballistic

图5 导弹速度曲线Fig.5 Curve of missile’s velocity

图6 弹道倾角曲线Fig.6 Curve of ballistic angle

图7 导引律VSG3下导弹与目标相对运动轨迹Fig.7 Relative motion track of missile and target using VSG3 guidance law
从图3可以看出,滑动模态面具有逐渐向0收敛的趋势,在VSG1下比在VSG3下要早一些发散,是因为VSG1没有对自动驾驶仪延迟特性进行补偿。由表1、图4及图6可以看出,偏置比例导引(BPNG)的命中精度不够高,未能击中目标,并且未能达到75°的期望落角;而VSG1和VSG3能够满足对于落角的要求,只是VSG1的落角误差相比较与VSG3稍微大一些。从图7可以看出,无论是在攻击机动目标还是非机动目标的情况下,该导引律均能很好地命中目标。
从以上数学仿真分析可以看出,本文改进设计的有限时间收敛导引律能够在大落角约束条件下命中目标,而偏置比例导引不能够满足大落角的要求。同时,在考虑了自动驾驶仪延迟特性所设计出的导引律VSG3比一般有限时间收敛导引律具有更好的鲁棒性。
7 结束语
本文深入研究了具有落角约束条件下反坦克导弹制导律的问题。通过应用非线性控制系统有限时间稳定理论和滑模变结构控制理论,并且考虑了导弹自动驾驶仪延迟特性,从而改进设计了有限时间收敛滑模制导律。该导引律保证弹目视线角速率在有限时间收敛至0,在最终时刻前满足期望的落角约束,并且能有效补偿自动驾驶仪延迟的影响。同时,在导引律设计中综合采用双曲正切函数法和变开关系数法,进一步削弱控制过程中产生的抖振现象。仿真结果表明了本文所改进设计导引律的有效性。
[1] KIM M,GRIDER K.Terminal Guidance for Impact Attitude Angle Constrained Flight Trajectories[J].IEEE Transactions on Aerospace and Electronic Systems,1973,9(6):852-859.
[2] SONG T L,SHIN S J.Time-Optimal Impact Angle Control for Vertical Plane Engagements[J].IEEE Transactions on Aerospace and Electronic Systems,1999,35(2):738-742.
[3] RYOO C K,CHO H,TAHK M J.Optimal Guidance Law with Terminal Impact Angle Constraint[J].Journal of Guidance,Control,and Dynamics,2005,28(3):724-732.
[4] 常超,林德福,祁载康,等.带落点和落角约束的最优末制导律研究[J].北京理工大学学报,2009,29(3):233-236.
CHANG Chao,LIN De-fu,QI Zai-kang,et al.Study on the Optimal Terminal Guidance Law with Interception and Impact Angle[J].Transactions of Beijing Institute of Technology,2009,29(3):233-236.
[5] KIM B S,LEEJ G,HAN H S.Biased PNG Law for Impact with Angular Constraint[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(1):277-288.
[6] 翁兴伟,黄长强,刘子阳.无人攻击机垂直命中目标的末制导律研究[J].兵工学报,2008,29(2):184-187.
WENG Xing-wei,HUANG Chang-qiang,LIU Zi-yang.Study on the Terminal Guidance Law of Hitting the Target Vertically for UCAV[J].Acta Armamentarii,2008,29(2):184-187.
[7] 刘永善,刘藻珍.被动寻的式侵彻炸弹的制导律设计[J].弹箭与制导学报,2006,26(2):16-19.
LIU Yong-shan,LIU Zao-zhen.Design of Guidance Law for Passive Homing Penetrating Bomb[J].Journal of Projectiles,Rockets,Missiles and Guidance,2006,26(2):16-19.
[8] 吴鹏,杨明.带终端攻击角度约束的变结构制导律[J].固体火箭技术,2008,31(2):116-120.
WU Peng,YANG Ming.Variable Structure Guidance Law with Terminal Attack Angle Constraint[J].Journal of Solid Rocket Technology,2008,31(2):116-120.
[9] 时建明,王洁,刘少伟.大气层外拦截自适应模糊滑模制导律研究[J].现代防御技术,2010,38(2):65-69.
SHI Jian-ming,WANG Jie,LIU Shao-wei.Adaptive Fuzzy Sliding Mode Guidance Law for Exoatmospheric Terminal Interception[J].Modern Defence Technology,2010,38(2):65-69.
[10] 高峰,唐胜景,师娇,等.一种改进的自适应滑模变结构导引律[J].弹道学报,2013,25(3):18-23.
GAO Feng,TANG Sheng-jing,SHI Jiao,et al.An Improved Adaptive Sliding-Mode Navigation Guidance Law with Variable Structure[J].Journal of Ballistics,2013,25(3):18-23.
[11] BHAT S,BERNSEIN D.Continuous Finite-Time Stabilization of the Translation and Rotational Double Integrators[J].IEEE Transactions,Autom,Control,1998,43:678-682.
[12] POZNYAK A S,POLYAKOV A Y,STRYGIN V V.Analysis of Finite-Time Convergence by the Method of Lyapunov Functions in Systems with Second-Order Sliding Modes[J].Int.J.Appl.Math.Mech.2011,75:289-303.
[13] 孙胜,周荻.有限时间收敛变结构导引律[J].宇航学报,2008,29(4):1258-1262.
SUN Sheng,ZHOU Di.A Finite Time Convergent Variable Structure Guidance Law[J].Journal of Astronautics,2008,29(4):1258-1262.
[14] 赵明元,魏明英,何秋茹.基于有限时间稳定和Back-stepping的直接力/气动力复合控制方法[J].宇航学报,2010,31(9):2157-2164.
ZHAO Ming-yuan,WEI Ming-ying,HE Qiu-ru.Research on Method of Lateral Jet and Aerodynamic Fins Compound Control Based on Finite Time Stability and Backstepping Approach[J].Journal of Astronautics,2010,31(9):2157-2164.
[15] 张宽桥,杨锁昌,陈鹏,等.带落角约束的自适应滑膜变结构导引律[J].现代防御技术,2016,44(3):44-51.
ZHANG Kuan-qiao,YANG Suo-chang,CHEN Peng,et al.Adaptive Sliding Mode Variable Structure Guidance Law with Impact Angle Constraint[J].Modern Defence Technology,2016,44(3):44-51.
